Anda mungkin juga menyukai
- Rayleigh Ritz MethodDokumen7 halamanRayleigh Ritz Methodrameshbabu_197963% (8)
- (Solutions) Kittel - Introduction To Solid State Physics 8Th EditionDokumen60 halaman(Solutions) Kittel - Introduction To Solid State Physics 8Th EditionCody Foster0% (1)
- Iodide and Bromide Ions in Brackish Water, Seawater, and Brines D 3869 - 04Dokumen12 halamanIodide and Bromide Ions in Brackish Water, Seawater, and Brines D 3869 - 04stevgonBelum ada peringkat
- Dharmakirti39s Commentary On ChakrasamvaraDokumen15 halamanDharmakirti39s Commentary On ChakrasamvaraThiago AlbuquerqueBelum ada peringkat
- Unit 2.3Dokumen12 halamanUnit 2.3Laxman Naidu NBelum ada peringkat
- MEM1833 Topic 3 State Space Realizations HANDOUTDokumen27 halamanMEM1833 Topic 3 State Space Realizations HANDOUTHasrulnizam HashimBelum ada peringkat
- Final Exam Solutions: N×N N×P M×NDokumen37 halamanFinal Exam Solutions: N×N N×P M×NMorokot AngelaBelum ada peringkat
- CH 3.6: Variation of Parameters: T G y T Q y T P yDokumen9 halamanCH 3.6: Variation of Parameters: T G y T Q y T P yPercdc DavaoBelum ada peringkat
- 2009 2 Art 04Dokumen8 halaman2009 2 Art 04Raja RamBelum ada peringkat
- HW 5 SolDokumen20 halamanHW 5 SolKhoa Le TienBelum ada peringkat
- Appendix I: A. 2-DOF Barycenter Stabilization ModelDokumen2 halamanAppendix I: A. 2-DOF Barycenter Stabilization Modelnchubccl100% (1)
- Chapter 11: Nonlinear Observers:: A Pair of States (X An Input Function U Such ThatDokumen9 halamanChapter 11: Nonlinear Observers:: A Pair of States (X An Input Function U Such ThatelectrotehnicaBelum ada peringkat
- Quantum Field Theory by Peskin - Chap03 SolutionDokumen15 halamanQuantum Field Theory by Peskin - Chap03 Solutionphoool100% (1)
- Introduction To Solid State Physics - Kittel, Charles - 8ed Solucionario PDFDokumen61 halamanIntroduction To Solid State Physics - Kittel, Charles - 8ed Solucionario PDFmanuelomar87Belum ada peringkat
- Workshop 10 SolutionsDokumen4 halamanWorkshop 10 SolutionsSteve DruryBelum ada peringkat
- Greens TheoremDokumen9 halamanGreens TheoremAnonymous KIUgOYBelum ada peringkat
- Homework 5Dokumen4 halamanHomework 5Ale Gomez100% (6)
- MathSlov 50-2000-2 5Dokumen10 halamanMathSlov 50-2000-2 5mirceamercaBelum ada peringkat
- ENEE 660 HW Sol #7Dokumen8 halamanENEE 660 HW Sol #7PeacefulLionBelum ada peringkat
- hw05 Solution PDFDokumen8 halamanhw05 Solution PDFsiddharth1kBelum ada peringkat
- Chapter 11Dokumen14 halamanChapter 11Miku Fourier AlvaradoBelum ada peringkat
- Chap 1Dokumen20 halamanChap 1torinomgBelum ada peringkat
- Mathematical Modeling of Mechanical Systems and Electrical SystemsDokumen49 halamanMathematical Modeling of Mechanical Systems and Electrical SystemsMary DunhamBelum ada peringkat
- Quantum Mechanics - Homework Assignment 3: Alejandro G Omez Espinosa October 8, 2012Dokumen7 halamanQuantum Mechanics - Homework Assignment 3: Alejandro G Omez Espinosa October 8, 2012Ale GomezBelum ada peringkat
- Ioannou Web Ch7Dokumen63 halamanIoannou Web Ch7Yasemin BarutcuBelum ada peringkat
- Lecture 2Dokumen8 halamanLecture 2Aravind SankarBelum ada peringkat
- Special Relativity: 6.1 The Group of Lorentz TransformationsDokumen10 halamanSpecial Relativity: 6.1 The Group of Lorentz Transformationsfree_progBelum ada peringkat
- Lagrangian FormulationDokumen7 halamanLagrangian FormulationFer Moncada100% (1)
- New Results in The Theory of The Classical Riemann Zeta-FunctionDokumen6 halamanNew Results in The Theory of The Classical Riemann Zeta-FunctionaldoBelum ada peringkat
- SSM Chapter 01Dokumen16 halamanSSM Chapter 01Jao Wei KuangBelum ada peringkat
- Elementary Theory of Metric SpacesDokumen2 halamanElementary Theory of Metric SpacesPrerit TerwayBelum ada peringkat
- MRRW Bound and Isoperimetric Problems: 6.1 PreliminariesDokumen8 halamanMRRW Bound and Isoperimetric Problems: 6.1 PreliminariesAshoka VanjareBelum ada peringkat
- 6.1 Bessel Functions of The First KindDokumen14 halaman6.1 Bessel Functions of The First KindMohammed Waleed SuleimanBelum ada peringkat
- Discrete Time Random Processes: 4.1 (A) UsingDokumen16 halamanDiscrete Time Random Processes: 4.1 (A) UsingSudipta GhoshBelum ada peringkat
- HW02 SolDokumen11 halamanHW02 SolEliuPatOjedaBelum ada peringkat
- DeretDokumen88 halamanDeretMuhammad WildanBelum ada peringkat
- Ex. 6.4Dokumen2 halamanEx. 6.4趙睿中Belum ada peringkat
- Polar CoordinatesDokumen22 halamanPolar CoordinatesSyed Kamran HaiderBelum ada peringkat
- ME2142/ME2142E Feedback Control Systems Solutions To Tutorial Problems Set 3 March 2007Dokumen8 halamanME2142/ME2142E Feedback Control Systems Solutions To Tutorial Problems Set 3 March 2007desmondlimmBelum ada peringkat
- Liu2017 Article AFastAndStableAlgorithmForLineDokumen31 halamanLiu2017 Article AFastAndStableAlgorithmForLineAman JalanBelum ada peringkat
- 06 04 Nonlinear RegressionDokumen22 halaman06 04 Nonlinear RegressionJohn Bofarull GuixBelum ada peringkat
- Gyrostellar EstimationDokumen6 halamanGyrostellar EstimationMarcAlomarPayerasBelum ada peringkat
- Solutions of Differential Equations: by Evaluations of FunctionsDokumen18 halamanSolutions of Differential Equations: by Evaluations of FunctionsChris RamosBelum ada peringkat
- MATH 121 - MIDTERM 1 Solutions: P Q R Q R (P Q) (P Q) RDokumen3 halamanMATH 121 - MIDTERM 1 Solutions: P Q R Q R (P Q) (P Q) RmahiruserBelum ada peringkat
- GATE Mathematics Paper-2007Dokumen11 halamanGATE Mathematics Paper-2007RajkumarBelum ada peringkat
- EuclidDokumen4 halamanEuclidayoyaBelum ada peringkat
- Inmo Sol 2000Dokumen5 halamanInmo Sol 2000ashu_dwy8605Belum ada peringkat
- Difference Equations To: Section 6.6 Trigonometric SubstitutionsDokumen9 halamanDifference Equations To: Section 6.6 Trigonometric Substitutionsquintis123Belum ada peringkat
- Random Thoughts On Numerical AnalysisDokumen17 halamanRandom Thoughts On Numerical AnalysispsylancerBelum ada peringkat
- Detailed Solutions A-07 JUNE 2003: I X X F F IDokumen32 halamanDetailed Solutions A-07 JUNE 2003: I X X F F IAdzLinkBalaoangBelum ada peringkat
- Homework 10Dokumen7 halamanHomework 10Ale GomezBelum ada peringkat
- Assign4 SolDokumen5 halamanAssign4 Solmorteza2885Belum ada peringkat
- Solving Poisson's Equation by Finite DifferencesDokumen6 halamanSolving Poisson's Equation by Finite DifferencesEugene LiBelum ada peringkat
- Solutions Advanced Econometrics 1 Midterm 2013Dokumen3 halamanSolutions Advanced Econometrics 1 Midterm 2013Esmée WinnubstBelum ada peringkat
- Physics 139A Homework 1: 1 Problem 1.1Dokumen10 halamanPhysics 139A Homework 1: 1 Problem 1.1a2618765Belum ada peringkat
- Math 8201 Homework 1 Fall 2014: Tianyu Tao September 9, 2014Dokumen6 halamanMath 8201 Homework 1 Fall 2014: Tianyu Tao September 9, 2014Tianyu TaoBelum ada peringkat
- Solutions For Problem Set For Ch. 23Dokumen12 halamanSolutions For Problem Set For Ch. 23ZbiggBelum ada peringkat
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesDari EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesBelum ada peringkat
- De Moiver's Theorem (Trigonometry) Mathematics Question BankDari EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankBelum ada peringkat
- Ioannou Web Ch5Dokumen37 halamanIoannou Web Ch5Yasemin BarutcuBelum ada peringkat
- Ioannou Web Ch7Dokumen63 halamanIoannou Web Ch7Yasemin BarutcuBelum ada peringkat
- Ioannou Web Ch4Dokumen32 halamanIoannou Web Ch4Yasemin BarutcuBelum ada peringkat
- Ioannou Web Ch3Dokumen41 halamanIoannou Web Ch3Yasemin BarutcuBelum ada peringkat
- Ioannou Web Ch2Dokumen6 halamanIoannou Web Ch2Yasemin BarutcuBelum ada peringkat
- Ioannou Web AppDokumen27 halamanIoannou Web AppYasemin BarutcuBelum ada peringkat
- Codesys Opc ServerDokumen36 halamanCodesys Opc ServerKhajwa Mere KhwajaBelum ada peringkat
- RTU560 Remote Terminal Unit: Transmission and Storage of Meter Data According To IEC 62056-21Dokumen25 halamanRTU560 Remote Terminal Unit: Transmission and Storage of Meter Data According To IEC 62056-21Yasemin BarutcuBelum ada peringkat
- Beastlikebalsam - Muscle BuildingDokumen10 halamanBeastlikebalsam - Muscle BuildingBalsam LaaroussiBelum ada peringkat
- EDS-A-0101: Automotive Restricted Hazardous Substances For PartsDokumen14 halamanEDS-A-0101: Automotive Restricted Hazardous Substances For PartsMuthu GaneshBelum ada peringkat
- Discrete Wavelet TransformDokumen10 halamanDiscrete Wavelet TransformVigneshInfotechBelum ada peringkat
- Clocks (New) PDFDokumen5 halamanClocks (New) PDFAbhay DabhadeBelum ada peringkat
- Diagnosis of TrypanosomiasisDokumen82 halamanDiagnosis of TrypanosomiasisDrVijayata Choudhary100% (1)
- The Indian & The SnakeDokumen3 halamanThe Indian & The SnakeashvinBelum ada peringkat
- ETR Series: A Full Spectrum of Products To Solve Your Application NeedsDokumen106 halamanETR Series: A Full Spectrum of Products To Solve Your Application Needs周小安Belum ada peringkat
- MMW ReviewerDokumen3 halamanMMW ReviewerMarcSaloj NeryBelum ada peringkat
- ECE199R-C12 Final Document OJTDokumen48 halamanECE199R-C12 Final Document OJTRigel ZabateBelum ada peringkat
- GSD Puppy Training Essentials PDFDokumen2 halamanGSD Puppy Training Essentials PDFseja saulBelum ada peringkat
- Bravo MRI II Operation ManualDokumen45 halamanBravo MRI II Operation ManualLuis100% (1)
- Regression Analysis Random Motors ProjectDokumen22 halamanRegression Analysis Random Motors ProjectPrateek AgrawalBelum ada peringkat
- Dna Adduct As Biomarker: Prof. Dr. Yahdiana Harahap, MS, AptDokumen68 halamanDna Adduct As Biomarker: Prof. Dr. Yahdiana Harahap, MS, AptNadia AaqilahBelum ada peringkat
- Skincare Routine Order Cheat SheetDokumen10 halamanSkincare Routine Order Cheat SheetYel Salenga100% (3)
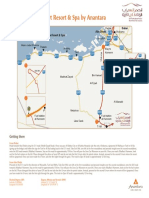
- Qasr Al Sarab Desert Resort Location Map June2012Dokumen1 halamanQasr Al Sarab Desert Resort Location Map June2012Anant GârgBelum ada peringkat
- Volvo Penta GensetDokumen4 halamanVolvo Penta GensetafandybaharuddinBelum ada peringkat
- Metal Workers BizHouse - UkDokumen3 halamanMetal Workers BizHouse - UkAlex BekeBelum ada peringkat
- Child DevelopmentDokumen15 halamanChild Development4AndreeaBelum ada peringkat
- Stopping by Woods On A Snowy EveningDokumen9 halamanStopping by Woods On A Snowy EveningJulia Garces100% (2)
- Climbing FormworkDokumen4 halamanClimbing FormworkAshwin B S RaoBelum ada peringkat
- Orbitol Motor TMTHWDokumen20 halamanOrbitol Motor TMTHWRodolfo ErenoBelum ada peringkat
- 2nd APJ Abdul Kalam Essay Writing CompetitionDokumen2 halaman2nd APJ Abdul Kalam Essay Writing CompetitionANURAG SINGHBelum ada peringkat
- Psle Science Keywords !Dokumen12 halamanPsle Science Keywords !Aftertea CarousellBelum ada peringkat
- Airport Security Post 9-11Dokumen7 halamanAirport Security Post 9-11lewisBelum ada peringkat
- Flow Zone Indicator Guided Workflows For PetrelDokumen11 halamanFlow Zone Indicator Guided Workflows For PetrelAiwarikiaar100% (1)
- Pharmalytica Exhibitor List 2023Dokumen3 halamanPharmalytica Exhibitor List 2023Suchita PoojaryBelum ada peringkat
- Danika Cristoal 18aDokumen4 halamanDanika Cristoal 18aapi-462148990Belum ada peringkat
- Wcdma Idle Mode (Ericsson)Dokumen29 halamanWcdma Idle Mode (Ericsson)Hosein ShahbaziBelum ada peringkat