Anda mungkin juga menyukai
- Calculation of Short-Circuit CurrentsDokumen35 halamanCalculation of Short-Circuit CurrentsdaodoquangBelum ada peringkat
- Design and Analysis of PMSG Based Wind Power Generation: Ee Department, SRMGPC, Lucknow 1Dokumen10 halamanDesign and Analysis of PMSG Based Wind Power Generation: Ee Department, SRMGPC, Lucknow 1AMANBelum ada peringkat
- Space-Vector Modulation in A Two-Phase Induction Motor Drive For Constant-Power OperationDokumen8 halamanSpace-Vector Modulation in A Two-Phase Induction Motor Drive For Constant-Power OperationinfodotzBelum ada peringkat
- DC Machines Lab ManualDokumen72 halamanDC Machines Lab ManualPuneeth PuniBelum ada peringkat
- Doubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationDokumen11 halamanDoubly Fed Induction Generator Using Back To Back PWM Converters and Its Application To Variable-Speed Wind-Energy GenerationVally ZazaBelum ada peringkat
- FEM Analysis of Hydrogenerator Performance During Field Short-Circuit FaultDokumen6 halamanFEM Analysis of Hydrogenerator Performance During Field Short-Circuit FaultbaradaranhamidBelum ada peringkat
- A Maximum Torque Control: A Controlled Capacitor For A Single-Phase Induction MotorDokumen8 halamanA Maximum Torque Control: A Controlled Capacitor For A Single-Phase Induction MotorPhạm Ngọc QuânBelum ada peringkat
- Position-Sensorless Method For Electric Braking Commutation of Brushless DC MachinesDokumen13 halamanPosition-Sensorless Method For Electric Braking Commutation of Brushless DC MachinesMalikAlrahabiBelum ada peringkat
- Electric Vehicle 4th ModuleDokumen19 halamanElectric Vehicle 4th ModuleSimi BaniBelum ada peringkat
- Speed Control of DC Motor Using PWMDokumen23 halamanSpeed Control of DC Motor Using PWMSunitha MaryBelum ada peringkat
- Optimal PDFDokumen6 halamanOptimal PDFjalilemadiBelum ada peringkat
- DC MotorDrivesDokumen24 halamanDC MotorDrivesyohannes getachewBelum ada peringkat
- Vector Control Approach For Switched Reluctance Motor To Mitigate Acoustic NoiseDokumen59 halamanVector Control Approach For Switched Reluctance Motor To Mitigate Acoustic NoiseKalyan Reddy AnuguBelum ada peringkat
- Power Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFDokumen6 halamanPower Electronics Application in DC Motor Drives - Case Study - ss03595 - Sarwan Shah PDFMehdi Raza KhorasaniBelum ada peringkat
- PWM Switching Strategy For Torque Ripple Minimization in BLDC MotorDokumen6 halamanPWM Switching Strategy For Torque Ripple Minimization in BLDC MotorekaliappanBelum ada peringkat
- 03 Listrik Statis 3Dokumen11 halaman03 Listrik Statis 3goodayBelum ada peringkat
- Em 1 TestingDokumen13 halamanEm 1 TestingAravindBelum ada peringkat
- A Common-Mode Voltage Reduction Strategy For ADokumen6 halamanA Common-Mode Voltage Reduction Strategy For Amalini72Belum ada peringkat
- Chapter No.2 - Literature Review: ML4812 UC 2854Dokumen3 halamanChapter No.2 - Literature Review: ML4812 UC 2854Pavan Kumar A GBelum ada peringkat
- New Sensor LessDokumen10 halamanNew Sensor LessAbhishek AgarwalBelum ada peringkat
- Paper 15Dokumen13 halamanPaper 15RakeshconclaveBelum ada peringkat
- Closed-Loop Control of Hybrid Stepper Motor DrivesDokumen7 halamanClosed-Loop Control of Hybrid Stepper Motor DrivesChanthu C NairBelum ada peringkat
- A Unity Power Factor Converter Using HalfDokumen14 halamanA Unity Power Factor Converter Using HalfLivia Faria PeresBelum ada peringkat
- How To Drive DC Motors With Smart Power IcsDokumen14 halamanHow To Drive DC Motors With Smart Power IcsGoran ŽivkovićBelum ada peringkat
- International Journal of Engineering Research and Development (IJERD)Dokumen7 halamanInternational Journal of Engineering Research and Development (IJERD)IJERDBelum ada peringkat
- The Dynamic Response of A Linear Brushless D.C. S. MoghaniDokumen4 halamanThe Dynamic Response of A Linear Brushless D.C. S. Moghaniflorin91Belum ada peringkat
- Steady State Anal Sis F M Invert R Fed Cage in Ti N T R RiveDokumen8 halamanSteady State Anal Sis F M Invert R Fed Cage in Ti N T R RiveBhushan ChittaragiBelum ada peringkat
- Speed Control of DC Motor: National Institute of Technology SikkimDokumen11 halamanSpeed Control of DC Motor: National Institute of Technology SikkimDilbagh SinghBelum ada peringkat
- EECT Experiment 8 Report (Manika Jain 2K19-EE-151)Dokumen5 halamanEECT Experiment 8 Report (Manika Jain 2K19-EE-151)2K19/EE/151 MANIKA JAINBelum ada peringkat
- Abhi GnaDokumen83 halamanAbhi Gnasai raparthiBelum ada peringkat
- Simulation of Novel Technique For DC Drive For Crane ApplicationDokumen5 halamanSimulation of Novel Technique For DC Drive For Crane ApplicationKypa Meenendra Nath Reddy100% (1)
- A New Torque Control Method For Torque Ripple Minimization of BLDC Motors With Un-Ideal Back EMFDokumen9 halamanA New Torque Control Method For Torque Ripple Minimization of BLDC Motors With Un-Ideal Back EMFPradeepChandraVarmaMandapatiBelum ada peringkat
- Speed Control of DC Motor by Armature Resistance ControlDokumen8 halamanSpeed Control of DC Motor by Armature Resistance ControlKosigar ChelladoraiBelum ada peringkat
- P. F Correction Control of 3-Ф Induction Motor Drive through PWM Current Controlled TechniqueDokumen6 halamanP. F Correction Control of 3-Ф Induction Motor Drive through PWM Current Controlled TechniqueDivya ShriBelum ada peringkat
- PEDS'01 Conference Proceedings Doubly-Fed Full-Controlled Induction Wind GeneratorDokumen7 halamanPEDS'01 Conference Proceedings Doubly-Fed Full-Controlled Induction Wind Generatorrida1001Belum ada peringkat
- Alternator Regulation (E.M.F. & M.M.F. Methods) : 1. ObjectDokumen8 halamanAlternator Regulation (E.M.F. & M.M.F. Methods) : 1. Objectsajd abbasBelum ada peringkat
- Control Three-Phase Drives Flux VectorDokumen160 halamanControl Three-Phase Drives Flux Vectorakoca23Belum ada peringkat
- Direct Torque Control of Brushless DC Motor: With Non-Sinusoidal Back-EMFDokumen7 halamanDirect Torque Control of Brushless DC Motor: With Non-Sinusoidal Back-EMFGenaro Bessa CeppoBelum ada peringkat
- Chapter 1: IntroductionDokumen118 halamanChapter 1: Introductionrizwan_adilBelum ada peringkat
- Thesis On Direct Torque ControlDokumen6 halamanThesis On Direct Torque Controlericabaldwinpittsburgh100% (2)
- Generalized Dynamic and Steady State Analysis of Self Excited Induction (SEIG)Dokumen6 halamanGeneralized Dynamic and Steady State Analysis of Self Excited Induction (SEIG)harisimpBelum ada peringkat
- An Improved Microcontroller-Based Sensorless Brushless DC (BLDC) Motor Drive For Automotive ApplicationsDokumen6 halamanAn Improved Microcontroller-Based Sensorless Brushless DC (BLDC) Motor Drive For Automotive ApplicationsKarthi Keyan R CBelum ada peringkat
- New Dead-Time Compensation Method of Power Inverter Using Carrier Based Sinusoidal Pulse-Width ModulationDokumen12 halamanNew Dead-Time Compensation Method of Power Inverter Using Carrier Based Sinusoidal Pulse-Width ModulationNikolas AugustoBelum ada peringkat
- Different Methods of Speed Control of Three-Phase PDFDokumen7 halamanDifferent Methods of Speed Control of Three-Phase PDFRicardo BerizzoBelum ada peringkat
- Improvement of Power System Transient Stability Using Fault Current Limiter and Thyristor Controlled Braking ResistorDokumen6 halamanImprovement of Power System Transient Stability Using Fault Current Limiter and Thyristor Controlled Braking ResistorabolhasanijabaliBelum ada peringkat
- Calculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsDokumen4 halamanCalculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsShakeel RanaBelum ada peringkat
- Rajaei 2010Dokumen19 halamanRajaei 2010gerson gomesBelum ada peringkat
- ThesisDokumen75 halamanThesishodeegits9526Belum ada peringkat
- EM Assignment 2Dokumen7 halamanEM Assignment 2M.Vijaya VarshiniBelum ada peringkat
- Average Torque Control of The Switched Reluctance Motor in High Speed ZoneDokumen5 halamanAverage Torque Control of The Switched Reluctance Motor in High Speed ZoneAlexander KrasovskyBelum ada peringkat
- Wind Power Distribution System Using Quazi Z Source Matrix ConverterDokumen9 halamanWind Power Distribution System Using Quazi Z Source Matrix ConverterSiva ForeviewBelum ada peringkat
- Ann 3Dokumen4 halamanAnn 3chawlavishnuBelum ada peringkat
- Synchronous Motor Research PaperDokumen5 halamanSynchronous Motor Research Paperhumin1byjig2100% (1)
- A Voltage-Mode PWM Buck Regulator With End-Point PredictionDokumen5 halamanA Voltage-Mode PWM Buck Regulator With End-Point PredictionWen DwenBelum ada peringkat
- A Novel Position Sensorless Control Method For Brushless DC MotorsDokumen8 halamanA Novel Position Sensorless Control Method For Brushless DC MotorsMuhammad Yusuf IrdandyBelum ada peringkat
- Direct Torque Control (DTC) in Induction Motor: M.G.MorshadDokumen12 halamanDirect Torque Control (DTC) in Induction Motor: M.G.MorshadAdil FarzandBelum ada peringkat
- Speed Control of DC MotorDokumen10 halamanSpeed Control of DC MotorYadira RocanoBelum ada peringkat
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDari EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlPenilaian: 5 dari 5 bintang5/5 (1)
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesDari EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesBelum ada peringkat
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetDari EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetBelum ada peringkat
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDari EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetBelum ada peringkat
- Ect129 Uninterruptible Static Power Supplies and The Protection of PersonsDokumen44 halamanEct129 Uninterruptible Static Power Supplies and The Protection of PersonsMarko VujicaBelum ada peringkat
- Slaa 075Dokumen19 halamanSlaa 075Manidhar ParvatamBelum ada peringkat
- Ethernet IP Texas InstrumentsDokumen6 halamanEthernet IP Texas InstrumentsFranzKafkaBelum ada peringkat
- Uhc AwatersDokumen60 halamanUhc Awaterskammu9713Belum ada peringkat
- Current-Transformer Phase-Shift Compensation and CalibrationDokumen7 halamanCurrent-Transformer Phase-Shift Compensation and CalibrationrsrtnjBelum ada peringkat
- C Programming For Embedded System Applications PDFDokumen54 halamanC Programming For Embedded System Applications PDFWendo David PesaBelum ada peringkat
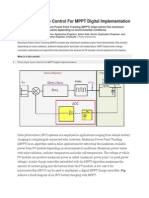
- Direct Duty Cycle Control For MPPT Digital ImplementationDokumen5 halamanDirect Duty Cycle Control For MPPT Digital ImplementationPhạm Văn TưởngBelum ada peringkat
- All About HarmonicsDokumen240 halamanAll About HarmonicsKhushal KharadeBelum ada peringkat
- Tutorial Digital Control Loop DesignDokumen17 halamanTutorial Digital Control Loop DesignPhạm Văn TưởngBelum ada peringkat
- 309 An 09 Solar Panel PowerDokumen3 halaman309 An 09 Solar Panel PowerJoel Medina GuttiBelum ada peringkat
- IEEE Transactions On Reliability Volume 43 Issue 1 1994 (Doi 10.1109/24.285133) Sallam, A.A. Desouky, M. Desouky, H. - Shunt Capacitor Effect On Electrical Distribution System ReliabilityDokumen7 halamanIEEE Transactions On Reliability Volume 43 Issue 1 1994 (Doi 10.1109/24.285133) Sallam, A.A. Desouky, M. Desouky, H. - Shunt Capacitor Effect On Electrical Distribution System ReliabilityPhạm Văn TưởngBelum ada peringkat
- Control Intelligence Improves Renewable Energy EfficiencyDokumen7 halamanControl Intelligence Improves Renewable Energy EfficiencyPhạm Văn TưởngBelum ada peringkat
- Evaluation and DSP Based Implementation of PWM Approaches For SinDokumen90 halamanEvaluation and DSP Based Implementation of PWM Approaches For SinPhạm Văn TưởngBelum ada peringkat
- AN296110 Current Sensing For Renewable EnergyDokumen4 halamanAN296110 Current Sensing For Renewable EnergyPhạm Văn TưởngBelum ada peringkat
- The Adventures of Huckleberry Finn by Mark TwainDokumen289 halamanThe Adventures of Huckleberry Finn by Mark TwainBooks100% (5)
- A Novel Dynamic Var CompensatorDokumen4 halamanA Novel Dynamic Var CompensatorPhạm Văn TưởngBelum ada peringkat
- Disturbance Observers For Rigid Mechanical Systems - Equivalence, Stability, and DesignDokumen10 halamanDisturbance Observers For Rigid Mechanical Systems - Equivalence, Stability, and DesignPhạm Văn TưởngBelum ada peringkat
- (Matsui) Sensorless PM Brushless DC Motor DrivesDokumen9 halaman(Matsui) Sensorless PM Brushless DC Motor DrivesPhạm Văn TưởngBelum ada peringkat
- Uninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsDokumen9 halamanUninterruptible Power Supply Multiloop Control Employing Digital Predictive Voltage and Current RegulatorsPhạm Văn TưởngBelum ada peringkat
- An Improved PV Battery Charger For Low Cost Low PowerDokumen4 halamanAn Improved PV Battery Charger For Low Cost Low PowerPhạm Văn TưởngBelum ada peringkat
- IEEE Transactions On Power Systems Volume 10 Issue 2 1995 (Doi 10.1109/59.387938) Larsen, E.V. Sanchez-Gasca, J.J. Chow, J.H. - Concepts For Design of FACTS Controllers To Damp Power SwingsDokumen9 halamanIEEE Transactions On Power Systems Volume 10 Issue 2 1995 (Doi 10.1109/59.387938) Larsen, E.V. Sanchez-Gasca, J.J. Chow, J.H. - Concepts For Design of FACTS Controllers To Damp Power SwingsPhạm Văn TưởngBelum ada peringkat
- 1.A New Battery Model For Use With Battery Energy Storage Systems and Electric Vehicles Power SystemsDokumen6 halaman1.A New Battery Model For Use With Battery Energy Storage Systems and Electric Vehicles Power SystemschethanBelum ada peringkat
- Informatics in Control Automation and RoboticsDokumen5 halamanInformatics in Control Automation and RoboticsPhạm Văn TưởngBelum ada peringkat
- Inverters For Single-Phase Grid Connected Photovoltaic Systems - An OverviewDokumen6 halamanInverters For Single-Phase Grid Connected Photovoltaic Systems - An OverviewPhạm Văn TưởngBelum ada peringkat
- Study of A Non-Isolated Bidirectional DC - DC Converter: C.-C. Lin, L.-S. Yang, G.W. WuDokumen8 halamanStudy of A Non-Isolated Bidirectional DC - DC Converter: C.-C. Lin, L.-S. Yang, G.W. WuPhạm Văn Tưởng100% (1)
- TW Exams Ielts How To Prepare Ielts TipsDokumen2 halamanTW Exams Ielts How To Prepare Ielts TipsHoda ElhadaryBelum ada peringkat
- Phan Tich 1 Bai Task 2 by Ngoc BachDokumen4 halamanPhan Tich 1 Bai Task 2 by Ngoc BachPhạm Văn Tưởng100% (1)
- NHSPE ReadingDokumen5 halamanNHSPE ReadingMohamed HanafiBelum ada peringkat
- Space Vector Modulation An IntroductionDokumen10 halamanSpace Vector Modulation An IntroductionJohan LinderBelum ada peringkat
- A Low-Cost Compliant 7-DOF Robotic Manipulator: Morgan Quigley, Alan Asbeck, and Andrew Y. NGDokumen8 halamanA Low-Cost Compliant 7-DOF Robotic Manipulator: Morgan Quigley, Alan Asbeck, and Andrew Y. NGsigmateBelum ada peringkat
- HTTP WWW - Linuxcnc.org IndexDokumen7 halamanHTTP WWW - Linuxcnc.org IndexMassimiliano MilanBelum ada peringkat
- Solar Cars The Seminar ReportDokumen26 halamanSolar Cars The Seminar ReportGarvit Midha100% (2)
- BRUSH 2 Pole Data Sheet - 10 - 20Dokumen2 halamanBRUSH 2 Pole Data Sheet - 10 - 20akaBelum ada peringkat
- Stepper Motor Interfacing With AVR Atmega16/32Dokumen4 halamanStepper Motor Interfacing With AVR Atmega16/32ayuBelum ada peringkat
- 1 s2.0 S0029801817305164 MainDokumen15 halaman1 s2.0 S0029801817305164 MainMohammed LoukiliBelum ada peringkat
- Tapping - Screwing - Helicoil Pose - Countersinking - DrillingDokumen6 halamanTapping - Screwing - Helicoil Pose - Countersinking - Drillingefsantos87Belum ada peringkat
- Comparison of BLDC and AC Motors in Electric VehiclesDokumen26 halamanComparison of BLDC and AC Motors in Electric VehiclesJohnny Edward KingsleyBelum ada peringkat
- AMC-servo Drive OverviewDokumen28 halamanAMC-servo Drive OverviewjoonimBelum ada peringkat
- Hybrid Vehicles Syllabus B.E VI SemesterDokumen1 halamanHybrid Vehicles Syllabus B.E VI Semesterashoku24007Belum ada peringkat
- High-performance servo motors for precision motion controlDokumen4 halamanHigh-performance servo motors for precision motion controlJosueBelum ada peringkat
- ACT1000 User ManualDokumen45 halamanACT1000 User ManualivanBelum ada peringkat
- Sem QuestionsDokumen11 halamanSem QuestionsRojaBelum ada peringkat
- Systems Engineering EV 1672483240Dokumen6 halamanSystems Engineering EV 1672483240anubhav saxenaBelum ada peringkat
- RMxprt12使用指南Dokumen481 halamanRMxprt12使用指南Latisha CarterBelum ada peringkat
- PED SyllabusDokumen32 halamanPED SyllabusRoger RozarioBelum ada peringkat
- Dual Stator Winding Induction Machine - Problems, Progress, and Future Scope PDFDokumen12 halamanDual Stator Winding Induction Machine - Problems, Progress, and Future Scope PDFTaiwoBelum ada peringkat
- VEM Technologies' Integrated Engineering SolutionsDokumen8 halamanVEM Technologies' Integrated Engineering SolutionsVamshi Krishnam Raju NadimpalliBelum ada peringkat
- App Controlled Screwjack DocumentDokumen65 halamanApp Controlled Screwjack DocumentJust4 FuntechBelum ada peringkat
- Sensorless Speed Controlled Brushless DC Drive Using The TMS320C242 DSP ControllerDokumen17 halamanSensorless Speed Controlled Brushless DC Drive Using The TMS320C242 DSP ControllerVladv123Belum ada peringkat
- Fuzzy Logic Based Speed Control of BLDC Motor PDFDokumen5 halamanFuzzy Logic Based Speed Control of BLDC Motor PDFtewodros asfawBelum ada peringkat
- Ventilador Inversor Ingeteam 06025SA Data SheetDokumen7 halamanVentilador Inversor Ingeteam 06025SA Data SheetFrancisco Martin BurgosBelum ada peringkat
- Yang SHEN PHD Thesis-revised-FinalDokumen241 halamanYang SHEN PHD Thesis-revised-FinalCazimir BostanBelum ada peringkat
- Design of A Low Cost Thruster For An Autonomous Underwater VehicleDokumen6 halamanDesign of A Low Cost Thruster For An Autonomous Underwater VehiclefuadBelum ada peringkat
- Preparation Tp2 Raheel AhmedDokumen100 halamanPreparation Tp2 Raheel AhmedAklil MBelum ada peringkat
- b20 Blower EnergyDokumen22 halamanb20 Blower Energyaziz_priambodoBelum ada peringkat
- Brushless Exciter Alignment GuideDokumen3 halamanBrushless Exciter Alignment GuideanilscoobBelum ada peringkat
- DATRON CNC-Machine Catalogue Prosp enDokumen44 halamanDATRON CNC-Machine Catalogue Prosp enadBelum ada peringkat
- Amb24 3Dokumen2 halamanAmb24 3LuisBelum ada peringkat
- YGFC Catalog - EN - PUBL-8212 (1218)Dokumen16 halamanYGFC Catalog - EN - PUBL-8212 (1218)jotace469Belum ada peringkat