Anda mungkin juga menyukai
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- RaspiCam DocumentationDokumen18 halamanRaspiCam Documentationleneneck9057Belum ada peringkat
- RaspiCam DocumentationDokumen18 halamanRaspiCam Documentationleneneck9057Belum ada peringkat
- NX8 User Defined FeaturesDokumen3 halamanNX8 User Defined Featuresleneneck9057Belum ada peringkat
- Dell-2408wfp User's GuideDokumen41 halamanDell-2408wfp User's Guideleneneck9057Belum ada peringkat
- Educational Analog Computer EC1-OPDokumen40 halamanEducational Analog Computer EC1-OPleneneck9057Belum ada peringkat
- Basic Inertial NavigationDokumen38 halamanBasic Inertial Navigationleneneck9057100% (1)
- C# DevelopmentDokumen191 halamanC# Developmentleneneck9057100% (4)
- Total Innovation in England GovernmentDokumen104 halamanTotal Innovation in England GovernmentRupee Rudolf Lucy HaBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Integrals of Differential Binomials and Chebyshev's CriterionDokumen4 halamanIntegrals of Differential Binomials and Chebyshev's CriterionEnrique GonzalezBelum ada peringkat
- Elasticity & Oscillations: Ut Tension, Sic Vis As Extension, So Force. Extension Is Directly Proportional To ForceDokumen11 halamanElasticity & Oscillations: Ut Tension, Sic Vis As Extension, So Force. Extension Is Directly Proportional To ForceJustin Paul VallinanBelum ada peringkat
- JEE Class Companion Physics: Module-2Dokumen7 halamanJEE Class Companion Physics: Module-2neoisonlyoneBelum ada peringkat
- Sr. No. A B C D Ans: Engineering Mechanics (2019 Pattern) Unit 2Dokumen14 halamanSr. No. A B C D Ans: Engineering Mechanics (2019 Pattern) Unit 2Ajit MoreBelum ada peringkat
- WiproDokumen44 halamanWiproapi-26541915Belum ada peringkat
- Ch-1 Measurement (Complete)Dokumen13 halamanCh-1 Measurement (Complete)Mahendra ModiBelum ada peringkat
- 5 - RegressionDokumen63 halaman5 - RegressionMarcello RossiBelum ada peringkat
- Engineering Mathematics III 2015 Solved Question Papers For VTU All Semester 3 PDFDokumen25 halamanEngineering Mathematics III 2015 Solved Question Papers For VTU All Semester 3 PDFAbishek Abh50% (2)
- Prediction of Fatigue Failure in A Camshaft Using The Crack MethodDokumen9 halamanPrediction of Fatigue Failure in A Camshaft Using The Crack MethodDiego PovedaBelum ada peringkat
- Chapter 9 - Sacred GeometryDokumen3 halamanChapter 9 - Sacred GeometryzsuzannaBelum ada peringkat
- Routine Odd Sem 2019-20 FinalDokumen4 halamanRoutine Odd Sem 2019-20 FinalZiyaul HodaBelum ada peringkat
- Basic ProbDokumen12 halamanBasic ProbChaaaBelum ada peringkat
- Impact of Cash Conversion Cycle On Firm's ProfitabilityDokumen3 halamanImpact of Cash Conversion Cycle On Firm's ProfitabilityAnonymous 7eO9enzBelum ada peringkat
- IP Addressing and Subnetting IPv4 Workbook - Instructors Version - v2 - 1 PDFDokumen89 halamanIP Addressing and Subnetting IPv4 Workbook - Instructors Version - v2 - 1 PDFfsrom375% (4)
- Time SignatureDokumen13 halamanTime SignaturecornelBelum ada peringkat
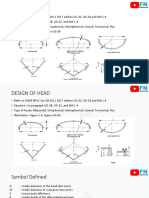
- Design of Formed VesselDokumen16 halamanDesign of Formed VesselTito FebriantoBelum ada peringkat
- Open Channel Flow Resistance - Ben Chie Yen - 2002 PDFDokumen20 halamanOpen Channel Flow Resistance - Ben Chie Yen - 2002 PDFAndres Granados100% (2)
- FANUC Series 16i 18i 21i Expansion of Custom Macro Interface SignalDokumen10 halamanFANUC Series 16i 18i 21i Expansion of Custom Macro Interface Signalmahdi elmayBelum ada peringkat
- Cse PDFDokumen33 halamanCse PDFSha Nkar JavleBelum ada peringkat
- A Scheduling Approach For Ship Design Project With Fields Constraint in Tasks and Human ResourcesDokumen6 halamanA Scheduling Approach For Ship Design Project With Fields Constraint in Tasks and Human ResourcesavciahmBelum ada peringkat
- Unit I PDFDokumen32 halamanUnit I PDFmenaka67% (3)
- Effect of Axial Load Mode Shapes A N D Frequencies BeamsDokumen33 halamanEffect of Axial Load Mode Shapes A N D Frequencies BeamsYoyok SetyoBelum ada peringkat
- Large Power Transformers - Karsai-Kerenyi-Kiss - OcrDokumen622 halamanLarge Power Transformers - Karsai-Kerenyi-Kiss - OcrJuan Jerez100% (1)
- Difference EquationsDokumen193 halamanDifference EquationsYukta Modernite Raj100% (1)
- Asset Pricing Teaching NotesDokumen126 halamanAsset Pricing Teaching NotesPipaticoBelum ada peringkat
- Ultrasonic Testing-Includes Shear Wave PDFDokumen36 halamanUltrasonic Testing-Includes Shear Wave PDFcutefrenzyBelum ada peringkat
- Wingridds Users GuideDokumen360 halamanWingridds Users GuidedardBelum ada peringkat
- Module 1: Computer Fundamentals 1.1 Introduction To Number System and CodesDokumen45 halamanModule 1: Computer Fundamentals 1.1 Introduction To Number System and CodesBachiBelum ada peringkat
- HaskellDokumen33 halamanHaskellanon_889114720Belum ada peringkat
- Hypothesis Testing Roadmap PDFDokumen2 halamanHypothesis Testing Roadmap PDFShajean Jaleel100% (1)