Anda mungkin juga menyukai
- Khazana Mil GayaDokumen45 halamanKhazana Mil GayaSandipan DharBelum ada peringkat
- Elasto-Plastic Analysis of Internally Pressurized Thick Walled CylinderDokumen11 halamanElasto-Plastic Analysis of Internally Pressurized Thick Walled Cylinderjeddins_1Belum ada peringkat
- Journal of The Mechanics and Physics of Solids: N.A. Fleck, J.R. WillisDokumen17 halamanJournal of The Mechanics and Physics of Solids: N.A. Fleck, J.R. WillisMohan ChandraBelum ada peringkat
- The Boussinesq Problem in Dipolar Gradient ElasticityDokumen35 halamanThe Boussinesq Problem in Dipolar Gradient ElasticityAnshul PanwarBelum ada peringkat
- 430 PDFDokumen33 halaman430 PDFPeterBelum ada peringkat
- Constitutive Law PolycarbonateDokumen10 halamanConstitutive Law PolycarbonateajaykumarKBSBelum ada peringkat
- Elastic-Plastic Large Deformation Analysis Using SPHDokumen5 halamanElastic-Plastic Large Deformation Analysis Using SPHRanjan PramanikBelum ada peringkat
- Rheological Modelling of Complex Fluids. I. The Concept of Effective Volume Fraction RevisitedDokumen9 halamanRheological Modelling of Complex Fluids. I. The Concept of Effective Volume Fraction RevisitedodexBelum ada peringkat
- Reference BooksDokumen23 halamanReference BooksIgor Gabriel Teixeira GómezBelum ada peringkat
- Harris ThesisDokumen22 halamanHarris ThesisTanu RdBelum ada peringkat
- Chapter 21: Design Consideration in Material Selection: Design For Enhanced Material DampingDokumen8 halamanChapter 21: Design Consideration in Material Selection: Design For Enhanced Material DampingKhurram KirmaniBelum ada peringkat
- 03 PDFDokumen62 halaman03 PDFKenneth James Matias BenavidezBelum ada peringkat
- Experiments and Theory in Strain Gradient PDFDokumen32 halamanExperiments and Theory in Strain Gradient PDFAnonymous 17ihTauS5Belum ada peringkat
- Amit Acharya 4Dokumen6 halamanAmit Acharya 4Disha ChatterjeeBelum ada peringkat
- Journal of The Mechanics and Physics of Solids: Noureddine Damil, Michel Potier-FerryDokumen15 halamanJournal of The Mechanics and Physics of Solids: Noureddine Damil, Michel Potier-FerryBoumediene BakhaddaBelum ada peringkat
- Elastic/plastic Buckling of Thick Plates: C.M. Wang, Y. Xiang, J. ChakrabartyDokumen24 halamanElastic/plastic Buckling of Thick Plates: C.M. Wang, Y. Xiang, J. Chakrabartyguojie zhouBelum ada peringkat
- ME501 L3 Stress-Strain Relations Oct 2017Dokumen8 halamanME501 L3 Stress-Strain Relations Oct 2017Firas RocktBelum ada peringkat
- 3-A O - Vatulyan,-S A - NesterovDokumen15 halaman3-A O - Vatulyan,-S A - Nesterovwedha rayhanantoBelum ada peringkat
- Finite Element of Composites PlateDokumen20 halamanFinite Element of Composites PlaterushckyBelum ada peringkat
- Analytical Solutions in Elasto-Plastic Bending of Beams With PDFDokumen12 halamanAnalytical Solutions in Elasto-Plastic Bending of Beams With PDFMariusz Milewski50% (2)
- The Classical Theory of ElasticityDokumen2 halamanThe Classical Theory of ElasticityeradiBelum ada peringkat
- Practical Aspects of Finite Element SimulationDokumen11 halamanPractical Aspects of Finite Element SimulationChandrashekar HiremathBelum ada peringkat
- Effect of Strain Gradients and Heterogeneity On Flow Strength of Particle Reinforced Metal-Matrix CompositesDokumen7 halamanEffect of Strain Gradients and Heterogeneity On Flow Strength of Particle Reinforced Metal-Matrix CompositestkslibBelum ada peringkat
- The Resilience of The Logarithmic Law To Pressure Gradient Evidence From Direct Numerical SimulationDokumen13 halamanThe Resilience of The Logarithmic Law To Pressure Gradient Evidence From Direct Numerical Simulationraashid83Belum ada peringkat
- On Two Micromechanics Theories For Determining Micro Macro Relations in Heterogeneous SolidsDokumen16 halamanOn Two Micromechanics Theories For Determining Micro Macro Relations in Heterogeneous Solidsdavibarbosa91Belum ada peringkat
- Plane Elasticity Solutions For Beams With Fixed EndsDokumen15 halamanPlane Elasticity Solutions For Beams With Fixed EndsMustafaMahdiBelum ada peringkat
- Crystals 07 00235 v2Dokumen12 halamanCrystals 07 00235 v2MERT EKEMENBelum ada peringkat
- Numerical Modelling of Shocks in SolidsDokumen12 halamanNumerical Modelling of Shocks in SolidsSam vermBelum ada peringkat
- TMP 24 BBDokumen10 halamanTMP 24 BBFrontiersBelum ada peringkat
- Effect of Void Cluster On Ductile Failure Evolution: Tvergaard, ViggoDokumen21 halamanEffect of Void Cluster On Ductile Failure Evolution: Tvergaard, ViggoYuleppo ABelum ada peringkat
- Plasticity: Monotonic Stress / Strain Diagram For Elastic-Plastic BehaviourDokumen15 halamanPlasticity: Monotonic Stress / Strain Diagram For Elastic-Plastic Behaviourkarrar333 ALIYAHIABelum ada peringkat
- Finite Strain - Isotropic HyperelasticityDokumen26 halamanFinite Strain - Isotropic HyperelasticityvilukBelum ada peringkat
- Plastic Limit State of Frame StructuresDokumen62 halamanPlastic Limit State of Frame Structuresprabhu81Belum ada peringkat
- Combined Hardening and Softening Constitutive Model of Plasticity: Precursor To Shear Slip Line FailureDokumen13 halamanCombined Hardening and Softening Constitutive Model of Plasticity: Precursor To Shear Slip Line FailureNaida AdemovicBelum ada peringkat
- An Asymptotic Finite-Deformation Analysis of The Elastostatic FieldDokumen41 halamanAn Asymptotic Finite-Deformation Analysis of The Elastostatic FieldkhalilmansouriBelum ada peringkat
- (3 - 4) A General Analytical Model Based On Elastic Foundation Beam TheoryDokumen14 halaman(3 - 4) A General Analytical Model Based On Elastic Foundation Beam Theoryshahbazbegian.uniBelum ada peringkat
- Constitutive Models For Compressible Nonlinearly Elastic Materials With Limiting Chain ExtensibilityDokumen16 halamanConstitutive Models For Compressible Nonlinearly Elastic Materials With Limiting Chain Extensibility2007rlwjdtnBelum ada peringkat
- Transversely Isotropic Plasticity With Application To Fiber - Reinforced PlasticsDokumen20 halamanTransversely Isotropic Plasticity With Application To Fiber - Reinforced Plasticsshossain1987Belum ada peringkat
- A Critical Review of Triaxiality Based Failure CriteriaDokumen9 halamanA Critical Review of Triaxiality Based Failure CriteriaKevinBelum ada peringkat
- Elastic ConstantsDokumen18 halamanElastic ConstantsÑM balochBelum ada peringkat
- Inter-Facial Crack OpeningDokumen25 halamanInter-Facial Crack OpeningChukwuemeka JosephBelum ada peringkat
- CH 12Dokumen64 halamanCH 12LeonardoMadeira11Belum ada peringkat
- 1 s2.0 S0013794412000999 MainDokumen11 halaman1 s2.0 S0013794412000999 MainDivyanshu LalBelum ada peringkat
- Flexural Analysis of Deep Beam Subjected To Parabolic Load Using Refined Shear Deformation TheoryDokumen10 halamanFlexural Analysis of Deep Beam Subjected To Parabolic Load Using Refined Shear Deformation Theoryakash kumarBelum ada peringkat
- Finite Element Model For Linear Elastic Thick Shells Using Gradient Recovery MethodDokumen28 halamanFinite Element Model For Linear Elastic Thick Shells Using Gradient Recovery MethodFongho Eric SinclairBelum ada peringkat
- Plastic Deformation of Glassy Polymers: Correlation Between Shear Activation Volume and Entanglement DensityDokumen7 halamanPlastic Deformation of Glassy Polymers: Correlation Between Shear Activation Volume and Entanglement DensityCatherine CcasaBelum ada peringkat
- Modal Analysis of Laminated Composite Plates by A New Hybrid Assumed Strain Finite ElementDokumen11 halamanModal Analysis of Laminated Composite Plates by A New Hybrid Assumed Strain Finite ElementKarthik KBelum ada peringkat
- Optimal Plastic Design of A Bar Under Combined Torsion, Bending and ShearDokumen13 halamanOptimal Plastic Design of A Bar Under Combined Torsion, Bending and ShearKeerthi KumarBelum ada peringkat
- Interface Crack Between Two Shear Deformable Elastic Layers: Jialai Wang, Pizhong QiaoDokumen15 halamanInterface Crack Between Two Shear Deformable Elastic Layers: Jialai Wang, Pizhong QiaoideepujBelum ada peringkat
- A N Analysis of A New Class of Integration Algorithms For Elastoplastic Constitutive RelationsDokumen14 halamanA N Analysis of A New Class of Integration Algorithms For Elastoplastic Constitutive RelationsArunBelum ada peringkat
- Modeling of Large Deformations of Hyperelastic MaterialsDokumen4 halamanModeling of Large Deformations of Hyperelastic MaterialsSEP-PublisherBelum ada peringkat
- Program A Cao Nao LinearDokumen5 halamanProgram A Cao Nao LinearJerfsonLimaBelum ada peringkat
- Flexural High Order-PandyaDokumen26 halamanFlexural High Order-Pandyavenkataanand palankiBelum ada peringkat
- Influence of The Initial Void Ratio On The Evolution of The Passive Earth PressureDokumen6 halamanInfluence of The Initial Void Ratio On The Evolution of The Passive Earth PressureLaboratoire LTGCBelum ada peringkat
- Volo Voi Hodges 2000Dokumen7 halamanVolo Voi Hodges 2000mihailmiBelum ada peringkat
- Seismic Design of Structures With Supplemental Maxwell Model-Based Brace-Damper SystemsDokumen8 halamanSeismic Design of Structures With Supplemental Maxwell Model-Based Brace-Damper SystemsDac PiBelum ada peringkat
- 3 Chaboche - IJP - 2005Dokumen26 halaman3 Chaboche - IJP - 2005Donald ZekaBelum ada peringkat
- Crack Velocity Dependent Toughness in Rate Dependent MaterialsDokumen6 halamanCrack Velocity Dependent Toughness in Rate Dependent MaterialsFahmi AzisBelum ada peringkat
- Lode Parameter and The Stress TriaxialityDokumen18 halamanLode Parameter and The Stress Triaxialityonnly1964Belum ada peringkat
- EM 1110-2-2005 - Standard Practice For Shotcrete 1Dokumen66 halamanEM 1110-2-2005 - Standard Practice For Shotcrete 1PDHLibraryBelum ada peringkat
- Lenton Steel Fortress: A Shear Reinforcement SystemDokumen2 halamanLenton Steel Fortress: A Shear Reinforcement Systemjmcc2Belum ada peringkat
- EFNARC European Specification For Sprayed Concrete Euro Concrete Spec EngDokumen35 halamanEFNARC European Specification For Sprayed Concrete Euro Concrete Spec Engengineerh100% (1)
- Legacy Report: ICC Evaluation Service, IncDokumen2 halamanLegacy Report: ICC Evaluation Service, Incjmcc2Belum ada peringkat
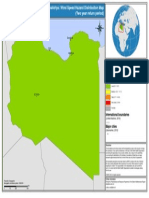
- Libyan Arab Jamahiriya: Wind Speed Hazard Distribution Map (Two Year Return Period)Dokumen1 halamanLibyan Arab Jamahiriya: Wind Speed Hazard Distribution Map (Two Year Return Period)jmcc2Belum ada peringkat
- 154 Excel MacrosDokumen64 halaman154 Excel Macrosjmcc2Belum ada peringkat
- Earthquake Vulnerability and Risk Modeling For The Area of Greater Cairo, Egypt - T.liesch Et AlDokumen1 halamanEarthquake Vulnerability and Risk Modeling For The Area of Greater Cairo, Egypt - T.liesch Et Aljmcc2Belum ada peringkat
- All ProblemsDokumen107 halamanAll ProblemsjoshiabhijeetBelum ada peringkat
- Pyramid e A4Dokumen0 halamanPyramid e A4jmcc2Belum ada peringkat
- Macalloy Cable StructuresDokumen12 halamanMacalloy Cable Structuresjmcc2Belum ada peringkat
- Flow Chart - Frame AnalysisDokumen4 halamanFlow Chart - Frame Analysisjmcc2Belum ada peringkat
- RR23 Rail BenchmarkingDokumen26 halamanRR23 Rail Benchmarkingjmcc2100% (1)
- Kalzip Systems Brochure MEDokumen72 halamanKalzip Systems Brochure MEjmcc2Belum ada peringkat
- Bailey Bridges Fm5 277Dokumen373 halamanBailey Bridges Fm5 277jmcc2Belum ada peringkat
- L1 Piles Subject To Lateral Soil MovementDokumen32 halamanL1 Piles Subject To Lateral Soil Movementedward the iiiBelum ada peringkat
- Course Title Course Level: UG Credit Units: Course Code: MAE301Dokumen3 halamanCourse Title Course Level: UG Credit Units: Course Code: MAE301Himanshu JangidBelum ada peringkat
- Lotte Titanpro PM803 Product DataDokumen1 halamanLotte Titanpro PM803 Product DataJoni Sie MssBelum ada peringkat
- Grade 5 Vs Grade 8 Fasteners - TineLokDokumen5 halamanGrade 5 Vs Grade 8 Fasteners - TineLokTodd AlexanderBelum ada peringkat
- API-653-Mar 2016Dokumen7 halamanAPI-653-Mar 2016Khaled Gamal100% (3)
- 2003 Novovic The Effect of Machined Topography and Integrity On Fatigue LifeDokumen10 halaman2003 Novovic The Effect of Machined Topography and Integrity On Fatigue LifeMaría Cristina CapaceBelum ada peringkat
- Effect of Synthetic and ProteinDokumen10 halamanEffect of Synthetic and Proteinprem adhikariBelum ada peringkat
- Laboratory Testing and Interpretation of Rock PropertiesDokumen13 halamanLaboratory Testing and Interpretation of Rock PropertiesIslemBelum ada peringkat
- Reinforced Concrete Design: Lecturer: CHOU Soklin, Ph.D. Department: Civil Engineering Academic Year: 2017/2018Dokumen56 halamanReinforced Concrete Design: Lecturer: CHOU Soklin, Ph.D. Department: Civil Engineering Academic Year: 2017/2018Mouy PhonThornBelum ada peringkat
- What Is Young's ModulusDokumen2 halamanWhat Is Young's ModulusAbdullah Al AsikBelum ada peringkat
- Timber Rivet ConnectionsDokumen25 halamanTimber Rivet ConnectionsJoe HowardBelum ada peringkat
- FlotopDokumen2 halamanFlotoppravi3434Belum ada peringkat
- SP-62 2004 CC RoadsDokumen38 halamanSP-62 2004 CC Roadsnimm1962Belum ada peringkat
- ABS Modu Part 4Dokumen232 halamanABS Modu Part 4yaenggBelum ada peringkat
- Geotechnical Notes and Problems NotesDokumen131 halamanGeotechnical Notes and Problems NotesNarcisa RudnicBelum ada peringkat
- Computer Aided Structural Analysis of AxDokumen21 halamanComputer Aided Structural Analysis of AxKarran KapurBelum ada peringkat
- Automated Seed Sowing MachineDokumen40 halamanAutomated Seed Sowing MachineRaja Mane67% (3)
- Curriculum M Tech Structural Construction Engineering 2019Dokumen27 halamanCurriculum M Tech Structural Construction Engineering 2019SumanBelum ada peringkat
- Flexural Behaviour of High-Strength Rectangular Concrete-Filled Steel Hollow SectionsDokumen16 halamanFlexural Behaviour of High-Strength Rectangular Concrete-Filled Steel Hollow SectionsnurhishammBelum ada peringkat
- L.A.B Mabhali, N. Sacks, S. Pityana: Article InfoDokumen9 halamanL.A.B Mabhali, N. Sacks, S. Pityana: Article InfoRakesh ChandraBelum ada peringkat
- Repair and Structural Performance of Initially Cracked RC SlabsDokumen9 halamanRepair and Structural Performance of Initially Cracked RC SlabsHari SankarBelum ada peringkat
- Online Course. 1-StrengthDokumen12 halamanOnline Course. 1-StrengthFatima Zahra SAIDIBelum ada peringkat
- Materials: Understanding The Thickness Effect On The Tensile Strength Property of Dyneema HB26 LaminatesDokumen18 halamanMaterials: Understanding The Thickness Effect On The Tensile Strength Property of Dyneema HB26 LaminatesPankaj MunjalBelum ada peringkat
- The Practicing Engineer's Guide To Designing by Strut and Tie Modeling (ACI 318-14)Dokumen6 halamanThe Practicing Engineer's Guide To Designing by Strut and Tie Modeling (ACI 318-14)jabh311Belum ada peringkat
- Stability Analysis of Pipe Rack in Petrochemical Facilities-IJAERDV04I0264348Dokumen11 halamanStability Analysis of Pipe Rack in Petrochemical Facilities-IJAERDV04I0264348Editor IJAERDBelum ada peringkat
- Ejercicios Resueltos: Ingenieria de MaterialesDokumen6 halamanEjercicios Resueltos: Ingenieria de MaterialesNicole AguilarBelum ada peringkat
- Guide EN13155 A1 Rev0Dokumen18 halamanGuide EN13155 A1 Rev0EdivaldoBelum ada peringkat
- Installation Instructions RISE CableDokumen14 halamanInstallation Instructions RISE CableABDUL GHAFOORBelum ada peringkat
- Engineers: My Notes StructuralDokumen14 halamanEngineers: My Notes StructuralGladies Mhay Binay SandovalBelum ada peringkat
- EXP 7 - MaterialsDokumen18 halamanEXP 7 - MaterialsLeslie CatindigBelum ada peringkat