Anda mungkin juga menyukai
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Design and Implementation of A Digitally Controlled Standalone Photovoltaic Power SupplyDokumen0 halamanDesign and Implementation of A Digitally Controlled Standalone Photovoltaic Power SupplyMarco LiguoriBelum ada peringkat
- Light Bulb CalculatorDokumen7 halamanLight Bulb CalculatorAntonio Pedro TessaroBelum ada peringkat
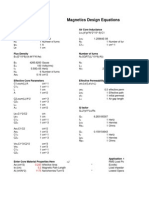
- Magnetics Calculations For Transformer DesignsDokumen7 halamanMagnetics Calculations For Transformer DesignsFabian HarteryBelum ada peringkat
- Cable Design - New (22.8.12)Dokumen84 halamanCable Design - New (22.8.12)Antonio Pedro TessaroBelum ada peringkat
- MEC Toolbox Users ManualDokumen14 halamanMEC Toolbox Users ManualAntonio Pedro TessaroBelum ada peringkat
- EarthingDokumen18 halamanEarthingrajeshreni1Belum ada peringkat
- Section 4 Electric Motors Unit 19 Motor ControlsDokumen23 halamanSection 4 Electric Motors Unit 19 Motor ControlsAntonio Pedro TessaroBelum ada peringkat
- A Evolução Das Redes Ethernet: Professor@Dokumen15 halamanA Evolução Das Redes Ethernet: Professor@Antonio Pedro TessaroBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- CS-13410 Introduction To Machine Learning: Lecture # 17Dokumen11 halamanCS-13410 Introduction To Machine Learning: Lecture # 17fake TigerBelum ada peringkat
- Transportation Problem Investment Strategy: Submitted by Jatin Arora (191089) Nitish Goel (191100) Hemant Kumar (191101)Dokumen31 halamanTransportation Problem Investment Strategy: Submitted by Jatin Arora (191089) Nitish Goel (191100) Hemant Kumar (191101)Nitish GoelBelum ada peringkat
- Phase Stability Analysis of Liquid Liquid EquilibriumDokumen15 halamanPhase Stability Analysis of Liquid Liquid EquilibriumJosemarPereiradaSilvaBelum ada peringkat
- Gain Margin, Phase Margin, and Crossover Frequencies - MATLAB MarginDokumen3 halamanGain Margin, Phase Margin, and Crossover Frequencies - MATLAB Margintipo_de_incognitoBelum ada peringkat
- Static State Feedback: Capitolo 0. INTRODUCTIONDokumen3 halamanStatic State Feedback: Capitolo 0. INTRODUCTIONAmine ELBelum ada peringkat
- PHD Thesis Machine LearningDokumen8 halamanPHD Thesis Machine Learningtygocixff100% (1)
- Mathworks Interview QuestionsDokumen5 halamanMathworks Interview QuestionsArnav Mendi100% (1)
- Experiment No.5: Title: Aim: Apparatus: Theory: (1) Explain Linear Block Codes in DetailDokumen8 halamanExperiment No.5: Title: Aim: Apparatus: Theory: (1) Explain Linear Block Codes in Detailabdulla qaisBelum ada peringkat
- Electrical Engineering - Industrial Instrumentation and ControlDokumen102 halamanElectrical Engineering - Industrial Instrumentation and ControlTrustWorthy100Belum ada peringkat
- Unbound SolutionDokumen8 halamanUnbound SolutionStar ClickBelum ada peringkat
- CHAPTER 4 POISION ProcessesDokumen23 halamanCHAPTER 4 POISION ProcessesBereketeab ZinabuBelum ada peringkat
- Ch2-3 Simple Sorting and Searching AlgsDokumen27 halamanCh2-3 Simple Sorting and Searching Algsanteneh mekonenBelum ada peringkat
- Measure of AssociationDokumen66 halamanMeasure of AssociationF.Ramesh DhanaseelanBelum ada peringkat
- Data Flow Diagram For Bank Management SystemDokumen11 halamanData Flow Diagram For Bank Management Systemsataparamaulik1Belum ada peringkat
- SolidWorks Flow Simulation Solution Adaptive Mesh RefinementDokumen5 halamanSolidWorks Flow Simulation Solution Adaptive Mesh RefinementSameeraLakmalWickramathilakaBelum ada peringkat
- Advance Deep LearningDokumen10 halamanAdvance Deep LearningAlia KhanBelum ada peringkat
- Calculus and ArchitectureDokumen12 halamanCalculus and ArchitectureLyca LamBelum ada peringkat
- M1-3 - Operations On Signals, Transformation of Independent Variable, SamplingDokumen16 halamanM1-3 - Operations On Signals, Transformation of Independent Variable, SamplingMANSI BHARDWAJBelum ada peringkat
- Cryptography in E-CommerceDokumen15 halamanCryptography in E-CommerceMugluuBelum ada peringkat
- 19Nh14 102190051 Lab13 Chương Trình MapReduce Shortest Path Using Parallel Breadth First Search BFS 02Dokumen16 halaman19Nh14 102190051 Lab13 Chương Trình MapReduce Shortest Path Using Parallel Breadth First Search BFS 02Tri An NguyễnBelum ada peringkat
- Control Theory IntroductionDokumen53 halamanControl Theory IntroductionSushmita KujurBelum ada peringkat
- Assignment No 1Dokumen5 halamanAssignment No 1JoshuaBelum ada peringkat
- Algorithms: DR M Kaykobad Professor CSE Department, BUETDokumen13 halamanAlgorithms: DR M Kaykobad Professor CSE Department, BUETMahomuda AkterBelum ada peringkat
- Quantum Electrodynamics by Imran AzizDokumen29 halamanQuantum Electrodynamics by Imran AzizDr.Imran Aziz0% (1)
- A Parametric Study of 3D Printed Polymer GearsDokumen12 halamanA Parametric Study of 3D Printed Polymer GearsGabriel SoaresBelum ada peringkat
- PID-Fuzzy Controller For Grate Cooler in Cement PlantDokumen5 halamanPID-Fuzzy Controller For Grate Cooler in Cement PlantamirBelum ada peringkat
- Edited MfcsDokumen20 halamanEdited MfcsAnil KumarBelum ada peringkat
- Assignment NotesDokumen9 halamanAssignment NotesVikram MulikBelum ada peringkat
- Discriminant AnalysisDokumen20 halamanDiscriminant AnalysisramanatenaliBelum ada peringkat
- cs-404-01, Sum15, Exam 4 PDFDokumen6 halamancs-404-01, Sum15, Exam 4 PDFJohn CrissmanBelum ada peringkat