Anda mungkin juga menyukai
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- MAN B&W Diesel Operating InstructionsDokumen366 halamanMAN B&W Diesel Operating Instructionspostolache marius100% (3)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- LVA Pump PDFDokumen2 halamanLVA Pump PDFhamadaBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Internal Gear PumpDokumen24 halamanInternal Gear Pumparisqi wahyuBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Apex Isfl: Horizontal End-Suction Pumps To ISO 2858 DimensionsDokumen2 halamanApex Isfl: Horizontal End-Suction Pumps To ISO 2858 DimensionsQing JyulyanBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- 3600 - LR SPINNER II Model 3600 Installation InstructionsDokumen4 halaman3600 - LR SPINNER II Model 3600 Installation InstructionszinouBelum ada peringkat
- Goulds 3180 BulletinDokumen20 halamanGoulds 3180 Bulletinraji357Belum ada peringkat
- VATER Eltrak INFO List JULY19Dokumen6 halamanVATER Eltrak INFO List JULY19GarryBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Duo Dan MillDokumen4 halamanDuo Dan Millnhungocbk92_22841857Belum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Project Proposal - Docx LRFDokumen10 halamanProject Proposal - Docx LRFNkongho JohnsonBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Standart Rodamientos Doble HileraDokumen2 halamanStandart Rodamientos Doble HileracarlosBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- D 3967 - 95a R01 - (Ingles) PDFDokumen3 halamanD 3967 - 95a R01 - (Ingles) PDFFrancisBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Logarithmical Crowning For Spur Gears: Keywords: Spur Gear, Lead Crowning, Misalignment, Contact PressureDokumen6 halamanLogarithmical Crowning For Spur Gears: Keywords: Spur Gear, Lead Crowning, Misalignment, Contact PressureSezgin BayrakBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- ECP4110T InfoPacketDokumen12 halamanECP4110T InfoPacketBenjamin BenzaquenBelum ada peringkat
- Lubi Dewatering PumpDokumen28 halamanLubi Dewatering PumpSohanlal ChouhanBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Chapter 1 FinalDokumen37 halamanChapter 1 FinalTamirat NemomsaBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- NSK Bearing Replacement GuideDokumen265 halamanNSK Bearing Replacement GuideJaime Albarrán Farías100% (1)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
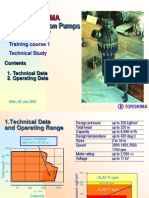
- BCP Technical & Operating DataDokumen24 halamanBCP Technical & Operating DataKrishnan SanthanarajBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Energy Drilling - CAT C13 Engine at 23888 HoursDokumen20 halamanEnergy Drilling - CAT C13 Engine at 23888 HoursYourKard100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Exxon IP 10-4-1 Reciprocating Process CompressorsDokumen9 halamanExxon IP 10-4-1 Reciprocating Process CompressorsGilvan SilvaBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Kei-Rsos Maritime Limited MachineryDokumen28 halamanKei-Rsos Maritime Limited MachineryTabitha MorinBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Mini Project ReportDokumen30 halamanMini Project Reportsurendra charyBelum ada peringkat
- Vibromax Single Drum CompactorsDokumen19 halamanVibromax Single Drum CompactorsEndra100% (1)
- 2-Stroke Table of ContentDokumen12 halaman2-Stroke Table of ContentCocoi SolisBelum ada peringkat
- BJV P16 ManualDokumen2 halamanBJV P16 ManualMehdiBelum ada peringkat
- PG 462-486Dokumen25 halamanPG 462-486Anonymous PIqdeNp8Belum ada peringkat
- Schedule 15 WTG Manufacturer Specifications (IaPet-WPP1)Dokumen22 halamanSchedule 15 WTG Manufacturer Specifications (IaPet-WPP1)Nguyễn Đức HoànBelum ada peringkat
- Iso 2795Dokumen32 halamanIso 2795Dule JovanovicBelum ada peringkat
- Selection of Antifriction BearingsDokumen22 halamanSelection of Antifriction BearingsSunil MandoreBelum ada peringkat
- Pc100-5 Custom Operational ManualDokumen53 halamanPc100-5 Custom Operational ManualPHÁT NGUYỄN THẾBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Rexroth External Gear Pump High Performance FDokumen60 halamanRexroth External Gear Pump High Performance FTomiBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)