Anda mungkin juga menyukai
- Smart Card Transaction ReceiptDokumen1 halamanSmart Card Transaction ReceiptShashi ShekharBelum ada peringkat
- Mars F07 SobhaDokumen3 halamanMars F07 SobhaShashi ShekharBelum ada peringkat
- Apply for a Credit Card Online in MinutesDokumen3 halamanApply for a Credit Card Online in MinutesShashi ShekharBelum ada peringkat
- Visvesvaraya Technological University: "Wavelet Transformer Applications in Power System"Dokumen7 halamanVisvesvaraya Technological University: "Wavelet Transformer Applications in Power System"Shashi ShekharBelum ada peringkat
- Route Marker (HT) Joint Marker (HT)Dokumen1 halamanRoute Marker (HT) Joint Marker (HT)Shashi ShekharBelum ada peringkat
- Party Details: Not eDokumen25 halamanParty Details: Not eShashi ShekharBelum ada peringkat
- Mars F07 SobhaDokumen3 halamanMars F07 SobhaShashi ShekharBelum ada peringkat
- Java ArraysDokumen5 halamanJava ArraysShashi ShekharBelum ada peringkat
- GATE 2014 Exam Admit Card: Examination Centre (1011)Dokumen1 halamanGATE 2014 Exam Admit Card: Examination Centre (1011)Shashi ShekharBelum ada peringkat
- Abstract Final+Dokumen3 halamanAbstract Final+Shashi ShekharBelum ada peringkat
- Guidelines & Format FOR Submission of Project Proposals: Under The SchemeDokumen16 halamanGuidelines & Format FOR Submission of Project Proposals: Under The SchemeBabug RaoBelum ada peringkat
- Load CellDokumen6 halamanLoad CellShashi ShekharBelum ada peringkat
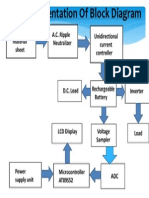
- Implementing Block DiagramsDokumen1 halamanImplementing Block DiagramsShashi ShekharBelum ada peringkat
- MATLAB WorkshopDokumen174 halamanMATLAB WorkshopShashi ShekharBelum ada peringkat
- Story of Call CenterDokumen165 halamanStory of Call CentersachinkharshikarBelum ada peringkat
- D882 NPN Transistor (In PWM Fan)Dokumen8 halamanD882 NPN Transistor (In PWM Fan)keyboard2014Belum ada peringkat
- Volture Datasheet 001Dokumen24 halamanVolture Datasheet 001Jonas B. BjarnøBelum ada peringkat
- 214 Magnetohydrodynamics: Icc"cC Ic'!i!,," 1 '"' !!Dokumen17 halaman214 Magnetohydrodynamics: Icc"cC Ic'!i!,," 1 '"' !!Sindhuja ThogaruBelum ada peringkat
- PDFDokumen8 halamanPDFShashi ShekharBelum ada peringkat
- 05008403Dokumen6 halaman05008403Shashi ShekharBelum ada peringkat
- B 12Dokumen14 halamanB 12Shashi ShekharBelum ada peringkat
- PDFDokumen13 halamanPDFShashi ShekharBelum ada peringkat
- Design and Implementation of Maximum Power Point Tracking (MPPT) Algorithm For A Standalone PV SystemDokumen1 halamanDesign and Implementation of Maximum Power Point Tracking (MPPT) Algorithm For A Standalone PV SystemShashi ShekharBelum ada peringkat
- Presentationsmarthomewithhomeautomation 1327673853557 Phpapp01 120127081915 Phpapp01Dokumen17 halamanPresentationsmarthomewithhomeautomation 1327673853557 Phpapp01 120127081915 Phpapp01Shashi ShekharBelum ada peringkat
- Automatic Changeover SwitchDokumen2 halamanAutomatic Changeover SwitchAniruddha NarkhedeBelum ada peringkat
- The Magnetohydrodynamic Power Generator-Basic Principles, State of The Art, and Areas of ApplicationDokumen1 halamanThe Magnetohydrodynamic Power Generator-Basic Principles, State of The Art, and Areas of ApplicationShashi ShekharBelum ada peringkat
- Ijesrt: VIDYUT Generation Via W VIDYUT Generation Via Walking: AnalysisDokumen3 halamanIjesrt: VIDYUT Generation Via W VIDYUT Generation Via Walking: AnalysisShashi ShekharBelum ada peringkat
- Question Paper 1336Dokumen3 halamanQuestion Paper 1336Shashi ShekharBelum ada peringkat
- English Comprehension MCQsDokumen10 halamanEnglish Comprehension MCQsjuhikabondBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- RF MEMS Switches and Switch Circuits: Shimul Chandra SahaDokumen174 halamanRF MEMS Switches and Switch Circuits: Shimul Chandra SahaRajBelum ada peringkat
- Building Management - Monitor Building Power SupplyDokumen1 halamanBuilding Management - Monitor Building Power SupplyMusembiBelum ada peringkat
- DS0037 NKT Cables CB CC Screened T Connectors PDFDokumen3 halamanDS0037 NKT Cables CB CC Screened T Connectors PDFromany allamBelum ada peringkat
- Novel Algorithm For Estimating The Distance of Open-Conductor Faults in HV Transmission Lines (2012) PDFDokumen7 halamanNovel Algorithm For Estimating The Distance of Open-Conductor Faults in HV Transmission Lines (2012) PDFDanielAlejandroRamosQueroBelum ada peringkat
- 3 Io-Plus: Addressable Triple Input/Output ModuleDokumen1 halaman3 Io-Plus: Addressable Triple Input/Output ModuleDávid DobóBelum ada peringkat
- Emcp 4.2Dokumen72 halamanEmcp 4.2RakibBelum ada peringkat
- User Manual For CTPT Analyzer CTP-200P (V2.21) - 2Dokumen35 halamanUser Manual For CTPT Analyzer CTP-200P (V2.21) - 2Mostafa ElabdBelum ada peringkat
- Maxtena Product Catalog 2015 LowDokumen44 halamanMaxtena Product Catalog 2015 Lowbek_marsBelum ada peringkat
- 42tl016 Audio Transformer DiagramDokumen2 halaman42tl016 Audio Transformer DiagramMiguelangel Lopez MadridBelum ada peringkat
- SKa3 17Dokumen4 halamanSKa3 17jorgeBelum ada peringkat
- CAPE 2014 Unit 1 Computer Science P2Dokumen8 halamanCAPE 2014 Unit 1 Computer Science P2dnitehawk qBelum ada peringkat
- SIL3 24/220Vdc/Vac Transistor-Out Detector: Technical DataDokumen2 halamanSIL3 24/220Vdc/Vac Transistor-Out Detector: Technical DataMohamed OmarBelum ada peringkat
- Bateria 150 Ah LidersDokumen2 halamanBateria 150 Ah LidersRicardo Rosas BustamanteBelum ada peringkat
- Computer-Aided Analysis of Linear Circuits Y-Matrix ApproachDokumen17 halamanComputer-Aided Analysis of Linear Circuits Y-Matrix ApproachAnuradha ChathurangaBelum ada peringkat
- CN174 Ribbon CableDokumen1 halamanCN174 Ribbon CableAymen CheffiBelum ada peringkat
- Lesson in RoboticsDokumen10 halamanLesson in RoboticsScottie PollardBelum ada peringkat
- Chapter 5 - Protection (2020 Edition)Dokumen61 halamanChapter 5 - Protection (2020 Edition)bibinbibinBelum ada peringkat
- CW HCVR5108H V2 Manual PDFDokumen276 halamanCW HCVR5108H V2 Manual PDFRoblespaulBelum ada peringkat
- Case Version 6.5 Service ManualDokumen276 halamanCase Version 6.5 Service ManualFauza Aryagus80% (5)
- ET-353, Lecture 19 (AM-VSB)Dokumen28 halamanET-353, Lecture 19 (AM-VSB)Jahanzaib MushtaqBelum ada peringkat
- BK-9622 Microplate Washer User Manual BIOBASE 2022.01.22Dokumen20 halamanBK-9622 Microplate Washer User Manual BIOBASE 2022.01.22Dody MuhadiBelum ada peringkat
- Calculate IDMT Over Current Relay Setting 50 51 Electrical Notes ArticlesDokumen5 halamanCalculate IDMT Over Current Relay Setting 50 51 Electrical Notes ArticlesTom100% (1)
- Protig III AirDokumen18 halamanProtig III AirkiowacBelum ada peringkat
- Lecture 2Dokumen22 halamanLecture 2Narendra KumavatBelum ada peringkat
- Research Article: Dynamic Modelling of A Solar Water Pumping System With Energy StorageDokumen13 halamanResearch Article: Dynamic Modelling of A Solar Water Pumping System With Energy Storagehabtamu melsewBelum ada peringkat
- 2021 SSN Combo Spa 28462 Control Base Repair GuideDokumen46 halaman2021 SSN Combo Spa 28462 Control Base Repair Guidekawon871Belum ada peringkat
- Passive and Active DC Breakers in Three Gorges-Changzhou HVDC ProjectDokumen5 halamanPassive and Active DC Breakers in Three Gorges-Changzhou HVDC ProjectdesignssdBelum ada peringkat
- Iec 61968-2Dokumen30 halamanIec 61968-2gzuBelum ada peringkat
- NK Cable PDFDokumen92 halamanNK Cable PDFQC ĐNBelum ada peringkat
- Manual Microfono LVLR 24 LeemDokumen10 halamanManual Microfono LVLR 24 Leembuscador09Belum ada peringkat