Anda mungkin juga menyukai
- Análise de Riscos - NR 33 PDFDokumen43 halamanAnálise de Riscos - NR 33 PDFValtoFreitasBelum ada peringkat
- Diagramas Logicos e ArgumentacaoDokumen77 halamanDiagramas Logicos e ArgumentacaoValtoFreitas100% (1)
- Aula 04 - RiscosDokumen19 halamanAula 04 - RiscosValtoFreitasBelum ada peringkat
- Dragonlance - Vol III - Dragões Da Alvorada Da PrimaveraDokumen52 halamanDragonlance - Vol III - Dragões Da Alvorada Da PrimaveraValtoFreitasBelum ada peringkat
- Tese Fernando ReduzidaDokumen140 halamanTese Fernando ReduzidaDiogo BorgesBelum ada peringkat
- Avaliando Aprendizado TopografiaDokumen4 halamanAvaliando Aprendizado TopografiaValtoFreitasBelum ada peringkat
- Notação VetorialDokumen45 halamanNotação VetorialCecilia Mageski M SantosBelum ada peringkat
- FisicaII 5º Experiência CompletaDokumen4 halamanFisicaII 5º Experiência CompletaValtoFreitasBelum ada peringkat
- Educação Ambiental - Conceitos - EticaDokumen30 halamanEducação Ambiental - Conceitos - EticaValtoFreitasBelum ada peringkat
- Confecção Aula 1Dokumen36 halamanConfecção Aula 1Mari AmaralBelum ada peringkat
- Translação Do PórticoDokumen39 halamanTranslação Do Pórticorobson leoniBelum ada peringkat
- Manuela AC2000 Pro PDFDokumen65 halamanManuela AC2000 Pro PDFAgustina MedinaBelum ada peringkat
- Fazer Teste - QUESTIONÁRIO UNIDADE IV - ELETRÔNICA ..Dokumen3 halamanFazer Teste - QUESTIONÁRIO UNIDADE IV - ELETRÔNICA ..Vitual LastBelum ada peringkat
- Bancada Didática para Estudo de Fator de PotênciaDokumen47 halamanBancada Didática para Estudo de Fator de PotênciaLaurindo CarinhasBelum ada peringkat
- Motor Weg Alto RendimentoDokumen12 halamanMotor Weg Alto Rendimentowalteranjos2005Belum ada peringkat
- LandauDokumen22 halamanLandauUlisses Roque50% (2)
- Um Estudante Dispõe de Dois RecipientesDokumen2 halamanUm Estudante Dispõe de Dois Recipientesjandrey1Belum ada peringkat
- Modelo de Laudo de TermografiaDokumen7 halamanModelo de Laudo de TermografiaDanilo Xavier100% (7)
- Controle de Balança - MineraçãoDokumen6 halamanControle de Balança - MineraçãoGilmar FerrettiBelum ada peringkat
- Ef10 Cad Lab Guia Prof Quest Al 3 2Dokumen1 halamanEf10 Cad Lab Guia Prof Quest Al 3 2Nuno Tenda100% (1)
- Midea SuperaquecimentoDokumen20 halamanMidea SuperaquecimentoAdelan M. CyrilloBelum ada peringkat
- Apostila NavegaçãoDokumen7 halamanApostila NavegaçãoVeridiana PereiraBelum ada peringkat
- Manual de Instalação Easy 3LDokumen46 halamanManual de Instalação Easy 3LCleyton De Oliveira MotaBelum ada peringkat
- Para RaiosDokumen11 halamanPara RaiosalfredohdnBelum ada peringkat
- Distinguir Substâncias Usando Propriedades Físicas. Ponto de Fusão e Ponto de EbuliçãoDokumen13 halamanDistinguir Substâncias Usando Propriedades Físicas. Ponto de Fusão e Ponto de EbuliçãoYara e lya está contigo100% (1)
- Relatório 3Dokumen19 halamanRelatório 3Ana Carolina RodriguesBelum ada peringkat
- Bambozzi - TMC 250 SDokumen10 halamanBambozzi - TMC 250 SPatricia CardosoBelum ada peringkat
- Alto-Falantes III - em Série e ParaleloDokumen4 halamanAlto-Falantes III - em Série e ParaleloAlex E Ana PaulaBelum ada peringkat
- Comparação de Sistemas - Correlação e RegressãoDokumen45 halamanComparação de Sistemas - Correlação e RegressãoNil FernandesBelum ada peringkat
- Simulado - Equações DiferenciaisDokumen5 halamanSimulado - Equações DiferenciaisOrestes CavalcanteBelum ada peringkat
- T1 Modelo ReduzidoDokumen21 halamanT1 Modelo ReduzidoGuilherme AlminhanaBelum ada peringkat
- Lista HidraulicaDokumen4 halamanLista Hidraulicagustavo20jesusBelum ada peringkat
- Cinematica VetorialDokumen8 halamanCinematica VetorialDiônathan RodriguesBelum ada peringkat
- Atividade1 2anoDokumen2 halamanAtividade1 2ano10kaiobrunoBelum ada peringkat
- Manutencao de Perifericos - Aula 07 - NobreakDokumen60 halamanManutencao de Perifericos - Aula 07 - NobreakElenilson FernandesBelum ada peringkat
- EXPERIMENTO I Principio de Arquimedes Densidade de Solidos EmpuxoDokumen6 halamanEXPERIMENTO I Principio de Arquimedes Densidade de Solidos EmpuxoxongassilvaBelum ada peringkat
- Anatel 2018Dokumen12 halamanAnatel 2018AndreBelum ada peringkat
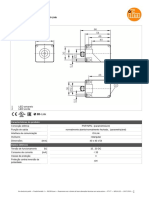
- Im5141 02 - PT PTDokumen4 halamanIm5141 02 - PT PTYAGO LUIS GERONYMO RAMOSBelum ada peringkat