Anda mungkin juga menyukai
- MIMO-OFDM Channel Estimation For Correlated Fading Channels: TX RXDokumen4 halamanMIMO-OFDM Channel Estimation For Correlated Fading Channels: TX RXNizar Ben Hadj YahiaBelum ada peringkat
- MIMO-OFDM Channel Estimation For Correlated Fading Channels: TX RXDokumen4 halamanMIMO-OFDM Channel Estimation For Correlated Fading Channels: TX RXkhanziaBelum ada peringkat
- Estimation of BER For A PSK OFDM RoFSO Link With Relays Over Exponentially Modeled Turbulence Channels With Pointing ErrorsDokumen1 halamanEstimation of BER For A PSK OFDM RoFSO Link With Relays Over Exponentially Modeled Turbulence Channels With Pointing ErrorsMichalis NinosBelum ada peringkat
- Adaptive Coded Modulation With Receive Antenna Diversity and Imperfect Channel Knowledge at Receiver and TransmitterDokumen7 halamanAdaptive Coded Modulation With Receive Antenna Diversity and Imperfect Channel Knowledge at Receiver and TransmitterMatthew Luis Llano LoveraBelum ada peringkat
- Degradation of Bit-Error Rate Coherent Optical Communications Due To Spectral Spread The Transmitter and The Local OscillatorDokumen10 halamanDegradation of Bit-Error Rate Coherent Optical Communications Due To Spectral Spread The Transmitter and The Local OscillatorWasyhun AsefaBelum ada peringkat
- Digital Equalization of Chromatic Dispersion and Polarization Mode DispersionDokumen11 halamanDigital Equalization of Chromatic Dispersion and Polarization Mode DispersionAliAzarniaBelum ada peringkat
- On Timing Offset and Frequency Offset Estimation in LTE UplinkDokumen10 halamanOn Timing Offset and Frequency Offset Estimation in LTE UplinkAjay SharmaBelum ada peringkat
- An Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsDokumen8 halamanAn Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsjdnfjngsBelum ada peringkat
- An Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsDokumen8 halamanAn Analysis of Pilot Symbol Assisted Modulation Rayleigh Fading ChannelsBrijesh GuptaBelum ada peringkat
- 6 1Dokumen6 halaman6 1javicho2006Belum ada peringkat
- Matlab Code For MtechDokumen47 halamanMatlab Code For MtechSangha MithraBelum ada peringkat
- Optical Coherent DetectionDokumen10 halamanOptical Coherent DetectionmehtakedarmBelum ada peringkat
- A Study of Channel Estimation Techniques Based On Pilot Arrangement in OFDM SystemsDokumen9 halamanA Study of Channel Estimation Techniques Based On Pilot Arrangement in OFDM Systemscasio91281Belum ada peringkat
- Modified Pts With Fecs For Papr Reduction in Mimo-Ofdm System With Different SubcarriersDokumen6 halamanModified Pts With Fecs For Papr Reduction in Mimo-Ofdm System With Different SubcarriersAnonymous bcDacMBelum ada peringkat
- (1997) An Analysis of Two-Dimensional Pilot-Symbol Assisted Modulation For OFDMDokumen4 halaman(1997) An Analysis of Two-Dimensional Pilot-Symbol Assisted Modulation For OFDM賴勇先Belum ada peringkat
- Adaptive Fibre Nonlinearity Precompensation Based On Optical Performance Monitoring in Coherent Optical Ofdm Transmission SystemsDokumen3 halamanAdaptive Fibre Nonlinearity Precompensation Based On Optical Performance Monitoring in Coherent Optical Ofdm Transmission SystemsgnanalakshmiBelum ada peringkat
- Optimal Fusion Rule For Cooperative Spectrum Sensing in Cognitive Radio NetworksDokumen8 halamanOptimal Fusion Rule For Cooperative Spectrum Sensing in Cognitive Radio NetworksshraddhabansalBelum ada peringkat
- Chap 4Dokumen18 halamanChap 4DITI SAI NAGA MAHESHBelum ada peringkat
- WR Iee2Dokumen6 halamanWR Iee2Sayed Ahmed Ali AlqallafBelum ada peringkat
- Papr Reduction in Blind Mimo Ofdm Systems Based On Independent Component AnalysisDokumen5 halamanPapr Reduction in Blind Mimo Ofdm Systems Based On Independent Component AnalysisManwinder SinghBelum ada peringkat
- Channel Estimation EJSR 70-1-04Dokumen8 halamanChannel Estimation EJSR 70-1-04حاتم الشرڭيBelum ada peringkat
- Passband Digital TransmissionDokumen99 halamanPassband Digital TransmissionVinod KumarBelum ada peringkat
- System With Linear-Phase Transmultiplexer: Seog Geun Kang Eon Kyeong JooDokumen2 halamanSystem With Linear-Phase Transmultiplexer: Seog Geun Kang Eon Kyeong Jooskh_1987Belum ada peringkat
- Convolutional Coded On-Off Keying Free-Space Optical Links Over Fading ChannelsDokumen6 halamanConvolutional Coded On-Off Keying Free-Space Optical Links Over Fading ChannelsseventhsensegroupBelum ada peringkat
- Reducing PAPR of OFDM Using PTS Techniques For Different Number of Sub-BlocksDokumen4 halamanReducing PAPR of OFDM Using PTS Techniques For Different Number of Sub-BlocksIjact EditorBelum ada peringkat
- Capacity and Power Allocation For Fading MIMO Channels With Channel Estimation ErrorDokumen12 halamanCapacity and Power Allocation For Fading MIMO Channels With Channel Estimation ErrorNadeem PashaBelum ada peringkat
- PSK Demodulation (Part 1)Dokumen10 halamanPSK Demodulation (Part 1)particlereddyBelum ada peringkat
- Simulation and Study For Coherent Ofdm SystemDokumen5 halamanSimulation and Study For Coherent Ofdm SystemTaha Al-abedBelum ada peringkat
- Multiple Input Multiple Output Orthogonal Frequency Division Multiplexing (MIMO-OFDM)Dokumen13 halamanMultiple Input Multiple Output Orthogonal Frequency Division Multiplexing (MIMO-OFDM)Anonymous bcDacMBelum ada peringkat
- Cramer Round RaoDokumen8 halamanCramer Round RaoJj KumarBelum ada peringkat
- Energy Detection of Narrowband Signals in Cognitive Radio SystemsDokumen5 halamanEnergy Detection of Narrowband Signals in Cognitive Radio SystemsKalpesh ChaudhariBelum ada peringkat
- Improving MIMO Spectral Efficiency in 4G Macro-Cellular NetworksDokumen6 halamanImproving MIMO Spectral Efficiency in 4G Macro-Cellular Networksወንድሙ ዘገዬBelum ada peringkat
- Adaptive Channel Estimation For Underwater Acoustic Mimo Ofdm SystemsDokumen6 halamanAdaptive Channel Estimation For Underwater Acoustic Mimo Ofdm SystemsDHBKHNDT6Belum ada peringkat
- An Efficient Channel Equalizer Using Artificial Neural NetworksDokumen10 halamanAn Efficient Channel Equalizer Using Artificial Neural Networksamreshjha22Belum ada peringkat
- 06301682Dokumen3 halaman06301682rajeeseenivasanBelum ada peringkat
- Modulation and Detection Techniques For DWDM Systems : Invited PaperDokumen9 halamanModulation and Detection Techniques For DWDM Systems : Invited PaperDevashish DasBelum ada peringkat
- Icc2003 A Van ZelstDokumen5 halamanIcc2003 A Van ZelstNguyen Thanh PhuongBelum ada peringkat
- Trường Đại Học Bách Khoa Hà Nội Viện Điện Tử - Viễn ThôngDokumen11 halamanTrường Đại Học Bách Khoa Hà Nội Viện Điện Tử - Viễn ThôngKhoa ĐTTT Nguyễn Tiến HòaBelum ada peringkat
- Carrier Frequency Synchronization in The Downlink of 3Gpp LteDokumen6 halamanCarrier Frequency Synchronization in The Downlink of 3Gpp LteAshok KumarBelum ada peringkat
- Performance Evaluation of A 3GPP LTE Terminal Receiver: Konstantinos Manolakis, Andreas Ibing, Volker JungnickelDokumen5 halamanPerformance Evaluation of A 3GPP LTE Terminal Receiver: Konstantinos Manolakis, Andreas Ibing, Volker Jungnickelhanochk12Belum ada peringkat
- Dac 1186Dokumen13 halamanDac 1186Dr-Eng Imad A. ShaheenBelum ada peringkat
- Spread Spectrum Ultrasonic Positioning SystemDokumen6 halamanSpread Spectrum Ultrasonic Positioning SystemTuấn DũngBelum ada peringkat
- Simulation of FSO Transmission ChannelDokumen5 halamanSimulation of FSO Transmission Channelkisibongdem1412Belum ada peringkat
- Primary User Detection in OFDM Based MIMO Cognitive RadioDokumen5 halamanPrimary User Detection in OFDM Based MIMO Cognitive RadioSomendra SahuBelum ada peringkat
- Spectral Correlation Based Signal Detection MethodDokumen6 halamanSpectral Correlation Based Signal Detection Methodlogu_thalirBelum ada peringkat
- Kalman-Filter-Based Channel Estimation For Orthogonal Frequency-Division Multiplexing Systems in Time-Varying ChannelsDokumen7 halamanKalman-Filter-Based Channel Estimation For Orthogonal Frequency-Division Multiplexing Systems in Time-Varying ChannelsDaniel DaiBelum ada peringkat
- Performance Analysis of A Trellis Coded Beamforming Scheme For MIMO Fading ChannelsDokumen4 halamanPerformance Analysis of A Trellis Coded Beamforming Scheme For MIMO Fading ChannelsMihai ManeaBelum ada peringkat
- Channel Estimation With Superimposed Pilot SequenceDokumen5 halamanChannel Estimation With Superimposed Pilot SequencelfklasBelum ada peringkat
- Channel Estimation Algorithms For OFDM SystemsDokumen5 halamanChannel Estimation Algorithms For OFDM Systemsdearprasanta6015Belum ada peringkat
- PAPR Reduction in OFDM Systems Using PTS: With New Phase SequencesDokumen7 halamanPAPR Reduction in OFDM Systems Using PTS: With New Phase SequencesAJER JOURNALBelum ada peringkat
- IJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchDokumen6 halamanIJCER (WWW - Ijceronline.com) International Journal of Computational Engineering ResearchInternational Journal of computational Engineering research (IJCER)Belum ada peringkat
- Analysis of A New Hybrid Clipping-SLM PAPR Reduction TechniqueDokumen4 halamanAnalysis of A New Hybrid Clipping-SLM PAPR Reduction TechniqueDr-Eng Imad A. ShaheenBelum ada peringkat
- On Using Transmission Overhead Efficiently For Channel Estimation in OFDMDokumen6 halamanOn Using Transmission Overhead Efficiently For Channel Estimation in OFDMAnonymous uspYoqEBelum ada peringkat
- Transmitter and ReceiverDokumen28 halamanTransmitter and ReceiverVinod NayyarBelum ada peringkat
- Cyclostationary-Based Architectures ForDokumen5 halamanCyclostationary-Based Architectures ForRaman KanaaBelum ada peringkat
- A Study of Channel Estimation in OFDM Systems: Sinem Coleri, Mustafa Ergen, Anuj Puri, Ahmad BahaiDokumen5 halamanA Study of Channel Estimation in OFDM Systems: Sinem Coleri, Mustafa Ergen, Anuj Puri, Ahmad BahaianchisanBelum ada peringkat
- Cleo 1995Dokumen2 halamanCleo 1995Armando Humberto Nolasco PintoBelum ada peringkat
- Software Radio: Sampling Rate Selection, Design and SynchronizationDari EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationBelum ada peringkat
- Switching TechniquesDokumen18 halamanSwitching Techniquestest_colanBelum ada peringkat
- A Robust and Secure Watermarking Scheme Based On Singular Values ReplacementDokumen16 halamanA Robust and Secure Watermarking Scheme Based On Singular Values Replacementfardeen123Belum ada peringkat
- AES Architecture in VHDLDokumen2 halamanAES Architecture in VHDLfardeen123Belum ada peringkat
- Class PPT ChapterDokumen49 halamanClass PPT Chapterfardeen123100% (1)
- PDFDokumen7 halamanPDFprabhman88Belum ada peringkat
- IdM-OWASP V 0 2 14Dokumen32 halamanIdM-OWASP V 0 2 14ssds2214Belum ada peringkat
- BER Performance of M-Ary PPM Free-Space Optical Communications With Channel FadingDokumen5 halamanBER Performance of M-Ary PPM Free-Space Optical Communications With Channel Fadingfardeen123Belum ada peringkat
- Clipping Distortion in Optical Wireless Communication Systems: Model, Simulations and StatisticsDokumen5 halamanClipping Distortion in Optical Wireless Communication Systems: Model, Simulations and Statisticsfardeen123Belum ada peringkat
- Understanding The Performance of Free Space Optics WillebrandDokumen23 halamanUnderstanding The Performance of Free Space Optics Willebrandfardeen123Belum ada peringkat
- Thesis Free Space OpticalDokumen93 halamanThesis Free Space Opticalfardeen123Belum ada peringkat
- Understanding The Performance of Free Space Optics WillebrandDokumen23 halamanUnderstanding The Performance of Free Space Optics Willebrandfardeen123Belum ada peringkat
- Altium VendorsDokumen2 halamanAltium Vendorsfardeen123Belum ada peringkat
- Architecture Design For An Adaptive Equalizer: 2 LMS and Its VariantsDokumen6 halamanArchitecture Design For An Adaptive Equalizer: 2 LMS and Its Variantsfardeen123Belum ada peringkat
- VHDLDokumen6 halamanVHDLfardeen123Belum ada peringkat
- 10 MathsDokumen12 halaman10 Mathskrishna16Belum ada peringkat
- Latest Project ListDokumen8 halamanLatest Project Listfardeen123Belum ada peringkat
- DLL CW 7Dokumen2 halamanDLL CW 7Bea67% (3)
- Data Sheet: Item N°: Curve Tolerance According To ISO 9906Dokumen3 halamanData Sheet: Item N°: Curve Tolerance According To ISO 9906Aan AndianaBelum ada peringkat
- Course Outline Principles of MarketingDokumen3 halamanCourse Outline Principles of MarketingKhate Tria De LeonBelum ada peringkat
- Design of CouplingDokumen75 halamanDesign of CouplingVatsal BhalaniBelum ada peringkat
- Bio 104 Lab Manual 2010Dokumen236 halamanBio 104 Lab Manual 2010Querrynithen100% (1)
- Practical Research 2.9Dokumen22 halamanPractical Research 2.9Michael GabertanBelum ada peringkat
- GARCH (1,1) Models: Ruprecht-Karls-Universit at HeidelbergDokumen42 halamanGARCH (1,1) Models: Ruprecht-Karls-Universit at HeidelbergRanjan KumarBelum ada peringkat
- Aquinas Five Ways To Prove That God Exists - The ArgumentsDokumen2 halamanAquinas Five Ways To Prove That God Exists - The ArgumentsAbhinav AnandBelum ada peringkat
- Hooke's LawDokumen1 halamanHooke's LawAnan BarghouthyBelum ada peringkat
- A12 CanSat Technlology Forclimate Monitoring PDFDokumen10 halamanA12 CanSat Technlology Forclimate Monitoring PDFDany PABON VILLAMIZARBelum ada peringkat
- Pursuit of Performance Findings From The 2014 Miller Heiman Sales Best Practices StudyDokumen37 halamanPursuit of Performance Findings From The 2014 Miller Heiman Sales Best Practices StudyLoredanaBelum ada peringkat
- Barack ObamaDokumen3 halamanBarack ObamaVijay KumarBelum ada peringkat
- Yz125 2005Dokumen58 halamanYz125 2005Ignacio Sanchez100% (1)
- FmatterDokumen12 halamanFmatterNabilAlshawish0% (2)
- Sim Educ101Dokumen101 halamanSim Educ101Rolando AmadBelum ada peringkat
- 8 Lesson 13 Viking FranceDokumen2 halaman8 Lesson 13 Viking Franceapi-332379661Belum ada peringkat
- Puratattva No 41Dokumen3 halamanPuratattva No 41ultimategoonBelum ada peringkat
- Pressure-Dependent Leak Detection Model and Its Application To A District Water SystemDokumen13 halamanPressure-Dependent Leak Detection Model and Its Application To A District Water SystemManjul KothariBelum ada peringkat
- Review Rachna WasteDokumen9 halamanReview Rachna WasteSanjeet DuhanBelum ada peringkat
- Libro INGLÉS BÁSICO IDokumen85 halamanLibro INGLÉS BÁSICO IRandalHoyos100% (1)
- Graduate Macro Theory II: The Real Business Cycle Model: Eric Sims University of Notre Dame Spring 2017Dokumen25 halamanGraduate Macro Theory II: The Real Business Cycle Model: Eric Sims University of Notre Dame Spring 2017Joab Dan Valdivia CoriaBelum ada peringkat
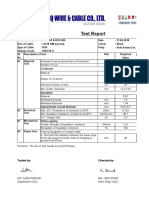
- Test Report: Tested By-Checked byDokumen12 halamanTest Report: Tested By-Checked byjamilBelum ada peringkat
- All Papers of Thermodyanmics and Heat TransferDokumen19 halamanAll Papers of Thermodyanmics and Heat TransfervismayluhadiyaBelum ada peringkat
- EE360 - Magnetic CircuitsDokumen48 halamanEE360 - Magnetic Circuitsبدون اسمBelum ada peringkat
- Tools of Persuasion StudentsDokumen4 halamanTools of Persuasion StudentsBelén Revilla GonzálesBelum ada peringkat
- Climatol GuideDokumen40 halamanClimatol GuideFressiaBelum ada peringkat
- Validación Española ADHD-RSDokumen7 halamanValidación Española ADHD-RSCristina Andreu NicuesaBelum ada peringkat
- Corometrics 170 Series BrochureDokumen3 halamanCorometrics 170 Series BrochureCesar MolanoBelum ada peringkat
- Quemador BrahmaDokumen4 halamanQuemador BrahmaClaudio VerdeBelum ada peringkat
- Kazi Shafikull IslamDokumen3 halamanKazi Shafikull IslamKazi Shafikull IslamBelum ada peringkat