Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Twist N' Lock Manual Toilets 29090 & 29120: FeaturesDokumen9 halamanTwist N' Lock Manual Toilets 29090 & 29120: FeaturesCarl WhitworthBelum ada peringkat
- Contoh Profesional Resume HaswarDokumen3 halamanContoh Profesional Resume HaswarpatarruBelum ada peringkat
- CHEMETRON ControllerDokumen10 halamanCHEMETRON ControllerFaraz AhmedBelum ada peringkat
- Mak 3Dokumen14 halamanMak 3patarruBelum ada peringkat
- Genetic Algorithms Explained SimplyDokumen10 halamanGenetic Algorithms Explained SimplypatarruBelum ada peringkat
- Mak 16m32cDokumen1 halamanMak 16m32cpatarruBelum ada peringkat
- Mak 16m32cDokumen1 halamanMak 16m32cpatarruBelum ada peringkat
- Mak 2Dokumen2 halamanMak 2patarruBelum ada peringkat
- Higher Algebra - Hall & KnightDokumen593 halamanHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Higher Algebra - Hall & KnightDokumen593 halamanHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Aaron Carter - Get Up On Ya FeetDokumen2 halamanAaron Carter - Get Up On Ya FeetpatarruBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Introduction To Fire Dynamics For Structural Engineers (School For Young Researchers, 2012)Dokumen86 halamanIntroduction To Fire Dynamics For Structural Engineers (School For Young Researchers, 2012)Guillermo Rein100% (1)
- MF AM Folded Monopole CharacteristicDokumen7 halamanMF AM Folded Monopole CharacteristicEnos Marcos BastosBelum ada peringkat
- Emf TSTP 27-08-2021Dokumen89 halamanEmf TSTP 27-08-2021bhanu kiranBelum ada peringkat
- RFID Simulation With ANSYS Electronics DesktopDokumen34 halamanRFID Simulation With ANSYS Electronics Desktoppasquale_dottoratoBelum ada peringkat
- Development of An Efficient Analysis Method For Prediction and Structural Dimensioning of Space Structures Subjected To Shock LoadingDokumen77 halamanDevelopment of An Efficient Analysis Method For Prediction and Structural Dimensioning of Space Structures Subjected To Shock LoadingtongBelum ada peringkat
- Syllabus EXTC Sem 6 NewDokumen21 halamanSyllabus EXTC Sem 6 Newudhayakumar_cBelum ada peringkat
- Antenna and Radar EngineeringDokumen141 halamanAntenna and Radar EngineeringArun Singh SumbriaBelum ada peringkat
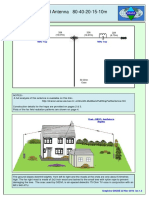
- w3dzz Antenna Iss 1 31 PDFDokumen4 halamanw3dzz Antenna Iss 1 31 PDFcokeclBelum ada peringkat
- IAT-1 AME Answer KeyDokumen2 halamanIAT-1 AME Answer KeyNaveenBelum ada peringkat
- HFSS TrainingDokumen79 halamanHFSS TrainingFernando ProkopiukBelum ada peringkat
- Notes 1Dokumen249 halamanNotes 1Sefa Ocakli0% (1)
- Antennas and Propagation For Wireless Communication Systems, 2nd EdDokumen553 halamanAntennas and Propagation For Wireless Communication Systems, 2nd Edthamtunhi130980% (5)
- I.seker - Calibration Methods For Phased Array RadarsDokumen16 halamanI.seker - Calibration Methods For Phased Array RadarsAlex YangBelum ada peringkat
- Rahul Singh - 66 - Expt - 3Dokumen6 halamanRahul Singh - 66 - Expt - 3Rahul SinghBelum ada peringkat
- GS Vol 3Dokumen78 halamanGS Vol 3Jadson Luís De Holanda TorresBelum ada peringkat
- Mil HDBK Ultrasonic TestingDokumen90 halamanMil HDBK Ultrasonic TestingJoel SequeiraBelum ada peringkat
- Windfarm Report PDFDokumen87 halamanWindfarm Report PDFHugo MendesBelum ada peringkat
- Metamaterial Surfaces For Near and Far-Field Applications PDFDokumen48 halamanMetamaterial Surfaces For Near and Far-Field Applications PDFPhạmThanhSơnBelum ada peringkat
- Dale Hunt 80 MeterDokumen7 halamanDale Hunt 80 MeterbuffeBelum ada peringkat
- Propagation Unit 2Dokumen21 halamanPropagation Unit 2KURRA UPENDRA CHOWDARYBelum ada peringkat
- PHD Thesis Daniel MontofreDokumen172 halamanPHD Thesis Daniel MontofreBryan GuevaraBelum ada peringkat
- RF Module Users Guide - COMSOLDokumen206 halamanRF Module Users Guide - COMSOLAhmad Usman100% (1)
- RadiofrequencyToolkit For Environmental Practitioners.Dokumen376 halamanRadiofrequencyToolkit For Environmental Practitioners.Shakespeare3Belum ada peringkat
- A Review of Offshore Windfarm Related Underwater Noise SourcesDokumen63 halamanA Review of Offshore Windfarm Related Underwater Noise SourcesJohn Williamson100% (2)
- Dynamics and Nonlinear Control of Space Electromagnetic DockingDokumen9 halamanDynamics and Nonlinear Control of Space Electromagnetic Dockingf20212935Belum ada peringkat
- Analysis of a Thin Wire Circular Loop AntennaDokumen11 halamanAnalysis of a Thin Wire Circular Loop AntennaSon Nguyen100% (1)
- Topic Moment Tensor Inversion and Moment Tensor InterpretationDokumen37 halamanTopic Moment Tensor Inversion and Moment Tensor InterpretationMarco QuirozBelum ada peringkat
- Measure RF Exposure from Wi-Fi DevicesDokumen41 halamanMeasure RF Exposure from Wi-Fi DevicespuljkeBelum ada peringkat
- Antenna and Wave PropagationDokumen3 halamanAntenna and Wave PropagationRatsihBelum ada peringkat
- Manual ts3 PDFDokumen26 halamanManual ts3 PDFecarrera1975Belum ada peringkat