Anda mungkin juga menyukai
- Section4 1Dokumen27 halamanSection4 1sonti11Belum ada peringkat
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportDari EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportBelum ada peringkat
- Section2 1Dokumen12 halamanSection2 1Abkarco10Belum ada peringkat
- Vibrations Solutions Section2 7Dokumen17 halamanVibrations Solutions Section2 7Mani Kumar100% (1)
- O level Physics Questions And Answer Practice Papers 2Dari EverandO level Physics Questions And Answer Practice Papers 2Penilaian: 5 dari 5 bintang5/5 (1)
- Section3 1Dokumen16 halamanSection3 1sonti11Belum ada peringkat
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesDari EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesBelum ada peringkat
- Section4 5Dokumen14 halamanSection4 5sonti11Belum ada peringkat
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeDari EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeBelum ada peringkat
- Section2 2Dokumen14 halamanSection2 2sonti11Belum ada peringkat
- Section2 5Dokumen6 halamanSection2 5sonti11Belum ada peringkat
- Mathematical Tables: Tables of in G [z] for Complex ArgumentDari EverandMathematical Tables: Tables of in G [z] for Complex ArgumentBelum ada peringkat
- Section1 6Dokumen7 halamanSection1 6sonti11Belum ada peringkat
- Section1 2Dokumen22 halamanSection1 2James WrightBelum ada peringkat
- Section5 1Dokumen22 halamanSection5 1sonti11Belum ada peringkat
- Vibration Sample ProblemDokumen24 halamanVibration Sample ProblemvillanuevamarkdBelum ada peringkat
- Section1 3Dokumen21 halamanSection1 3sonti11Belum ada peringkat
- Section2 4Dokumen11 halamanSection2 4sonti11Belum ada peringkat
- варианты колебаний Section1 - 4 PDFDokumen15 halamanварианты колебаний Section1 - 4 PDFLeo KutsBelum ada peringkat
- Problems and Solutions Section 1.4Dokumen15 halamanProblems and Solutions Section 1.4Haasen Hill100% (1)
- SolSec 4 - 10 PDFDokumen11 halamanSolSec 4 - 10 PDFHKTBelum ada peringkat
- Numerical Methods Final Requirements ShshsiwzbDokumen10 halamanNumerical Methods Final Requirements ShshsiwzbIñigo Carlos AquinoBelum ada peringkat
- Section4 2Dokumen21 halamanSection4 2sonti11Belum ada peringkat
- Dynamic QuizDokumen7 halamanDynamic QuizAlan ATBelum ada peringkat
- Section3 2Dokumen19 halamanSection3 2sonti11Belum ada peringkat
- Vibprobset 04Dokumen3 halamanVibprobset 04Aybek AhmetoğluBelum ada peringkat
- InvolutDokumen24 halamanInvolutal_mmDBelum ada peringkat
- CH 16 SolnDokumen12 halamanCH 16 Solnfajo1000Belum ada peringkat
- 171 390 2 PBDokumen23 halaman171 390 2 PBCamilaAndreaGrijalbaBelum ada peringkat
- Igcse Sample PaperDokumen8 halamanIgcse Sample PaperharshanauocBelum ada peringkat
- Diff EQ Chapter-4Dokumen156 halamanDiff EQ Chapter-4mcloughtBelum ada peringkat
- Psme QuizDokumen9 halamanPsme QuizJerico LlovidoBelum ada peringkat
- Vibration SolutionsDokumen8 halamanVibration Solutionschintha007Belum ada peringkat
- Sec 2.5Dokumen6 halamanSec 2.5Manoesh JohnBelum ada peringkat
- Time Resolved Amperometry: Potential Step For An OxidationDokumen10 halamanTime Resolved Amperometry: Potential Step For An OxidationStevo Gadafi BorojevićBelum ada peringkat
- 362 Ps 6 SolnsDokumen13 halaman362 Ps 6 Solnsrameshaarya99Belum ada peringkat
- CHE3161 - Semester1 - 2011 - SolutionsDokumen12 halamanCHE3161 - Semester1 - 2011 - Solutionsvenkiee50% (2)
- Section1 10Dokumen17 halamanSection1 10sonti11Belum ada peringkat
- Trig RefDokumen2 halamanTrig Refrrj44Belum ada peringkat
- Solutions HW 7Dokumen5 halamanSolutions HW 7sam9montgomeryBelum ada peringkat
- GEAS Mar2014 TH2 - SolutionsDokumen7 halamanGEAS Mar2014 TH2 - SolutionsLeoneil Angelo AbreuBelum ada peringkat
- Section5 3Dokumen12 halamanSection5 3sonti11Belum ada peringkat
- Solved MDOF Example PDFDokumen9 halamanSolved MDOF Example PDFhillamngBelum ada peringkat
- Calculation 2Dokumen5 halamanCalculation 2salhikarimBelum ada peringkat
- Correcciones Zettili 2009Dokumen20 halamanCorrecciones Zettili 2009artsanxBelum ada peringkat
- Section3 3Dokumen13 halamanSection3 3sonti11Belum ada peringkat
- Principles of Matlab (Fall 07) Workout #1Dokumen11 halamanPrinciples of Matlab (Fall 07) Workout #1Karim GaberBelum ada peringkat
- 08 2energy DeflectionDokumen102 halaman08 2energy DeflectionVannurSwamyBelum ada peringkat
- E7021E Example Exam 2009-10-20 SolutionsDokumen8 halamanE7021E Example Exam 2009-10-20 Solutionsc91950% (2)
- Aerodynamics Questions and Suggested Answers 2Dokumen5 halamanAerodynamics Questions and Suggested Answers 2ApikSanPewPewBelum ada peringkat
- Chapter11 ADokumen33 halamanChapter11 ANic BlandoBelum ada peringkat
- Chapter 04Dokumen13 halamanChapter 04Johnny Lee Worthy IIIBelum ada peringkat
- M 470 FL 04 Ex 1 SolDokumen9 halamanM 470 FL 04 Ex 1 SolEng Hussein ObeidatBelum ada peringkat
- Control of Mobile Robots: Linear SystemsDokumen65 halamanControl of Mobile Robots: Linear Systemssonti11Belum ada peringkat
- ME4405 Lab 2 Getting Started With CCS Due Date: February 2, 2016Dokumen7 halamanME4405 Lab 2 Getting Started With CCS Due Date: February 2, 2016sonti11Belum ada peringkat
- Glue Lecture 7 Slides PDFDokumen9 halamanGlue Lecture 7 Slides PDFsonti11Belum ada peringkat
- Cura User-Manual v1.0Dokumen41 halamanCura User-Manual v1.0kaosad75% (4)
- Guitar String Tension ExperimentDokumen7 halamanGuitar String Tension Experimentsonti11Belum ada peringkat
- Lab 6 ManualDokumen4 halamanLab 6 Manualsonti11Belum ada peringkat
- Lab 7 ManualDokumen5 halamanLab 7 Manualsonti11Belum ada peringkat
- MSP432 DriverLib Users Guide-MSP432P4xx-3 10 00 09Dokumen390 halamanMSP432 DriverLib Users Guide-MSP432P4xx-3 10 00 09sonti11Belum ada peringkat
- Lab 9 ManualDokumen5 halamanLab 9 Manualsonti11Belum ada peringkat
- MSP4324x Family Technical Reference ManualDokumen802 halamanMSP4324x Family Technical Reference ManualJair PiñerosBelum ada peringkat
- Project DescriptionDokumen2 halamanProject Descriptionsonti11Belum ada peringkat
- Class 36 More Reform MovementsDokumen56 halamanClass 36 More Reform Movementssonti11Belum ada peringkat
- MSP 432 P 401 RDokumen157 halamanMSP 432 P 401 RestebanBelum ada peringkat
- 09 Twists and WrenchesDokumen13 halaman09 Twists and Wrenchessonti11Belum ada peringkat
- Class 39: Towards War: Test Prep: What Happened in Kansas in 1856?Dokumen41 halamanClass 39: Towards War: Test Prep: What Happened in Kansas in 1856?sonti11Belum ada peringkat
- EkinodonsoDokumen1 halamanEkinodonsosonti11Belum ada peringkat
- Poou: Scale 3:2 Isometric ViewDokumen1 halamanPoou: Scale 3:2 Isometric Viewsonti11Belum ada peringkat
- Lomax - Southern Tour: Lomax - Long Way To TravelDokumen51 halamanLomax - Southern Tour: Lomax - Long Way To Travelsonti11Belum ada peringkat
- William Bradford Anne Hutchinson John Smith Roger Williams George Burroughs Samuel ParrishDokumen42 halamanWilliam Bradford Anne Hutchinson John Smith Roger Williams George Burroughs Samuel Parrishsonti11Belum ada peringkat
- Class 7: The Columbian Exchange: Opening Question: What Did You Have For Breakfast Today?Dokumen54 halamanClass 7: The Columbian Exchange: Opening Question: What Did You Have For Breakfast Today?sonti11Belum ada peringkat
- 17jan - Nativeamerica - As PostedDokumen66 halaman17jan - Nativeamerica - As Postedsonti11Belum ada peringkat
- 15jan - Earliest Americans - As PostedDokumen58 halaman15jan - Earliest Americans - As Postedsonti11Belum ada peringkat
- CASE IH Farmall 115U EP Tractor Service Repair ManualDokumen30 halamanCASE IH Farmall 115U EP Tractor Service Repair Manualejky93201573Belum ada peringkat
- Gravitation Class 9 Notes PDFDokumen6 halamanGravitation Class 9 Notes PDFHemlata BendsureBelum ada peringkat
- Lubrication Types and GradesDokumen6 halamanLubrication Types and Gradesroopa mBelum ada peringkat
- Spherical Roller Thrust Bearings - 29412 EDokumen1 halamanSpherical Roller Thrust Bearings - 29412 EManuel MartinezBelum ada peringkat
- BS en 22553 Welding Arrow SymbolDokumen13 halamanBS en 22553 Welding Arrow SymbolErcan Akkaya100% (3)
- Robotic Configurations 10.08 PDFDokumen15 halamanRobotic Configurations 10.08 PDFVenkateshAthava50% (2)
- AWD Buggy PlanDokumen4 halamanAWD Buggy PlanOtis19640% (1)
- FEEG2003 Exam Paper 2020-21-PrintDokumen12 halamanFEEG2003 Exam Paper 2020-21-Print3220355Belum ada peringkat
- Further Mechanics 1 Unit Test 1 Momentum and Impulse (Part 1) Mark SchemeDokumen6 halamanFurther Mechanics 1 Unit Test 1 Momentum and Impulse (Part 1) Mark SchemeGavin Man20% (5)
- Honeywell Solstice®454B R 454B TDS - EN 1Dokumen4 halamanHoneywell Solstice®454B R 454B TDS - EN 1tcBelum ada peringkat
- Bomba Kobe T200 - Manual de PartesDokumen13 halamanBomba Kobe T200 - Manual de PartesRonalRojas100% (1)
- 06、轻型冷水机组出厂试验大纲(中英文)Dokumen24 halaman06、轻型冷水机组出厂试验大纲(中英文)nur hasanBelum ada peringkat
- PTM - Pilot Training ManualBKPDokumen415 halamanPTM - Pilot Training ManualBKPRonaldo Passanha100% (1)
- Special Tools PolarisDokumen36 halamanSpecial Tools PolarisAman kumar GuptaBelum ada peringkat
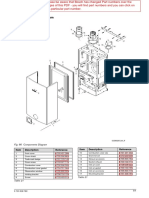
- Interior Components Diagram and Parts ListDokumen6 halamanInterior Components Diagram and Parts ListSoluciones Tecnicas GastronomicasBelum ada peringkat
- Hardness Conversion Table: Tensile StrengthDokumen1 halamanHardness Conversion Table: Tensile StrengthMehdy HosseiniBelum ada peringkat
- Energy Efficiency in Electrical Utilities PDFDokumen205 halamanEnergy Efficiency in Electrical Utilities PDFSunny Madhaw100% (1)
- Electrical Component LocatorDokumen8 halamanElectrical Component Locatoromar menciasBelum ada peringkat
- Betopom Arastirma 2Dokumen31 halamanBetopom Arastirma 2KvncGmz DzrBelum ada peringkat
- Hyster Walkie A218 (W40XT) Forklift Parts ManualDokumen11 halamanHyster Walkie A218 (W40XT) Forklift Parts ManualManuals CE & AgBelum ada peringkat
- Trailer Wiring CodesDokumen1 halamanTrailer Wiring CodesPaulDahlberg100% (1)
- Thermodynamics 1Dokumen69 halamanThermodynamics 113670319Belum ada peringkat
- Pefy P15nmsu eDokumen10 halamanPefy P15nmsu eAcero StahlBelum ada peringkat
- FadeccccDokumen69 halamanFadeccccsugihnuBelum ada peringkat
- Hazop Action Sheet: Project Title Yanbu Phase 3 Power & Desalination Plant Interfaces P&ID Drawing NoDokumen4 halamanHazop Action Sheet: Project Title Yanbu Phase 3 Power & Desalination Plant Interfaces P&ID Drawing NoVijaya Seharan NairBelum ada peringkat
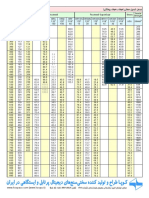
- Hs Hhs Ms Pump Performance SheetDokumen1 halamanHs Hhs Ms Pump Performance SheetsunbopumpBelum ada peringkat
- CH 10 Answers PDFDokumen21 halamanCH 10 Answers PDFHind Abu GhazlehBelum ada peringkat
- Autocom 2017.01 - CARS - ENG PDFDokumen460 halamanAutocom 2017.01 - CARS - ENG PDFCorban MihaiBelum ada peringkat
- Boiler Operator Need To Know TermsDokumen2 halamanBoiler Operator Need To Know TermsRafaqat Ali100% (1)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsDari EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- Basic Math & Pre-Algebra For DummiesDari EverandBasic Math & Pre-Algebra For DummiesPenilaian: 3.5 dari 5 bintang3.5/5 (6)
- Calculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusDari EverandCalculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Limitless Mind: Learn, Lead, and Live Without BarriersDari EverandLimitless Mind: Learn, Lead, and Live Without BarriersPenilaian: 4 dari 5 bintang4/5 (6)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Dari EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Belum ada peringkat
- Pre-Calculus Workbook For DummiesDari EverandPre-Calculus Workbook For DummiesPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Dari EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Penilaian: 5 dari 5 bintang5/5 (1)
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeDari EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticePenilaian: 4 dari 5 bintang4/5 (2)
- Math Workshop, Grade K: A Framework for Guided Math and Independent PracticeDari EverandMath Workshop, Grade K: A Framework for Guided Math and Independent PracticePenilaian: 5 dari 5 bintang5/5 (1)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryDari EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryBelum ada peringkat
- Geometric Patterns from Patchwork Quilts: And how to draw themDari EverandGeometric Patterns from Patchwork Quilts: And how to draw themPenilaian: 5 dari 5 bintang5/5 (1)
- Classroom-Ready Number Talks for Third, Fourth and Fifth Grade Teachers: 1,000 Interactive Math Activities that Promote Conceptual Understanding and Computational FluencyDari EverandClassroom-Ready Number Talks for Third, Fourth and Fifth Grade Teachers: 1,000 Interactive Math Activities that Promote Conceptual Understanding and Computational FluencyBelum ada peringkat
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormDari EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormPenilaian: 5 dari 5 bintang5/5 (5)














![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-2-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1714993295?v=1)