Anda mungkin juga menyukai
- Machine LearningDokumen56 halamanMachine LearningMani Vrs100% (3)
- Cheat Sheet FinalDokumen7 halamanCheat Sheet Finalkookmasteraj100% (2)
- ML NotesDokumen125 halamanML NotesAbhijit Das100% (2)
- The History and Physics of Magnetic Particle InspectionDokumen51 halamanThe History and Physics of Magnetic Particle InspectiondaemsalBelum ada peringkat
- Lindsay I Smith - A Tutorial On Principal Components AnalysisDokumen27 halamanLindsay I Smith - A Tutorial On Principal Components Analysisorestistsinalis100% (1)
- The Problem of ConsciousnessDokumen5 halamanThe Problem of ConsciousnessAvirukt MittalBelum ada peringkat
- K Nearest NeighbourDokumen2 halamanK Nearest NeighbourArpit KhareBelum ada peringkat
- Metrology - Book - Hari PDFDokumen212 halamanMetrology - Book - Hari PDFKallol ChakrabortyBelum ada peringkat
- K Nearest Neighbor Algorithm: Fundamentals and ApplicationsDari EverandK Nearest Neighbor Algorithm: Fundamentals and ApplicationsBelum ada peringkat
- Introduction to Slag Fundamentals Under 40 CharactersDokumen38 halamanIntroduction to Slag Fundamentals Under 40 CharactersNicole Altamirano Catalán100% (1)
- Studio Express A1 - DeutschDokumen22 halamanStudio Express A1 - DeutschMr. K0% (1)
- Introduction to KNN Classification with Python Implementation (40Dokumen125 halamanIntroduction to KNN Classification with Python Implementation (40Abhiraj Das100% (1)
- Package Nleqslv': R Topics DocumentedDokumen19 halamanPackage Nleqslv': R Topics Documentedrezza ruzuqiBelum ada peringkat
- LWP ManualDokumen14 halamanLWP ManualShabbir OsmaniBelum ada peringkat
- Numerical analysis of physics lab data using MATLABDokumen23 halamanNumerical analysis of physics lab data using MATLAByasintharaBelum ada peringkat
- Step 1Dokumen3 halamanStep 1dheerajgulati_31Belum ada peringkat
- Electronic Structure Calculations in GaussianDokumen8 halamanElectronic Structure Calculations in GaussianMark Cliffton BadlonBelum ada peringkat
- Applying KNN To Stock Price PredictionDokumen17 halamanApplying KNN To Stock Price PredictionMarius_2010Belum ada peringkat
- Machine learning and AIDokumen10 halamanMachine learning and AIsmedixonBelum ada peringkat
- KNN AlgorithmDokumen3 halamanKNN Algorithmrr_adi94Belum ada peringkat
- Determining The Number of Clusters in A Data SetDokumen6 halamanDetermining The Number of Clusters in A Data Setjohn949Belum ada peringkat
- Perceptron PDFDokumen8 halamanPerceptron PDFVel Ayutham0% (1)
- Numerical integration methodsDokumen92 halamanNumerical integration methodsTonyBarosevcicBelum ada peringkat
- Gauss-Newton Method For Algebraic Models: As Seen in Chapter 2 A Suitable Measure of The Discrepancy Between A ModelDokumen18 halamanGauss-Newton Method For Algebraic Models: As Seen in Chapter 2 A Suitable Measure of The Discrepancy Between A ModelcegarciaBelum ada peringkat
- Modal Synthesis Analysis Using Craig-Bampton Methodin An Object Oriented ApproachDokumen3 halamanModal Synthesis Analysis Using Craig-Bampton Methodin An Object Oriented ApproachMr. S. Thiyagu Asst Prof MECHBelum ada peringkat
- Class condition density and decision boundariesDokumen12 halamanClass condition density and decision boundariesMrunal BhilareBelum ada peringkat
- Doc@4Dokumen15 halamanDoc@4morris gichuhiBelum ada peringkat
- Haseeb Lab05 PSADokumen6 halamanHaseeb Lab05 PSAEng TariqBelum ada peringkat
- Kernel Nearest-Neighbor AlgorithmDokumen10 halamanKernel Nearest-Neighbor AlgorithmDebora OlivaresBelum ada peringkat
- Lab Manual On Soft Computing (IT-802) : Ms. Neha SexanaDokumen29 halamanLab Manual On Soft Computing (IT-802) : Ms. Neha SexanaAdarsh SrivastavaBelum ada peringkat
- Bookkeeping Functions: RandomDokumen16 halamanBookkeeping Functions: Randomlibin_paul_2Belum ada peringkat
- Nonparametric Analysis of Covariance (ANCOVA) in RDokumen18 halamanNonparametric Analysis of Covariance (ANCOVA) in RJose Camilo Diaz GranadosBelum ada peringkat
- Shuffle (: New in Version 3.6. Changed in Version 3.9: Raises ADokumen3 halamanShuffle (: New in Version 3.6. Changed in Version 3.9: Raises AwowomBelum ada peringkat
- RegtutorialDokumen32 halamanRegtutorialДарина ВахрушеваBelum ada peringkat
- 32 CongressDokumen18 halaman32 CongressSidney LinsBelum ada peringkat
- Dian Approximate OptimizerDokumen14 halamanDian Approximate Optimizertamann2004Belum ada peringkat
- Linear Regression Modelling and AnalysisDokumen17 halamanLinear Regression Modelling and AnalysisSavitha ElluruBelum ada peringkat
- NAG C Library Chapter Introduction S - Approximations of Special FunctionsDokumen9 halamanNAG C Library Chapter Introduction S - Approximations of Special FunctionsSamuel Pinto'oBelum ada peringkat
- Nonlinear least squares estimation in GretlDokumen50 halamanNonlinear least squares estimation in GretlTaha NajidBelum ada peringkat
- On Input Selection With Reversible Jump Markov Chain Monte Carlo SamplingDokumen10 halamanOn Input Selection With Reversible Jump Markov Chain Monte Carlo SamplingMutahira TahirBelum ada peringkat
- Major Classes of Neural NetworksDokumen21 halamanMajor Classes of Neural Networksbhaskar rao mBelum ada peringkat
- Scale-based Clustering using Radial Basis Function Networks (RBFNDokumen6 halamanScale-based Clustering using Radial Basis Function Networks (RBFNMahakGoindaniBelum ada peringkat
- Spss 8Dokumen4 halamanSpss 8Jacob TanBelum ada peringkat
- The Computer Journal 1965 Box 42 52Dokumen11 halamanThe Computer Journal 1965 Box 42 52Roberto Campos RuizBelum ada peringkat
- Nichita 2001Dokumen9 halamanNichita 2001franciani goedertBelum ada peringkat
- K Means AlgoDokumen7 halamanK Means AlgoPrakash ChorageBelum ada peringkat
- RBF, KNN, SVM, DTDokumen9 halamanRBF, KNN, SVM, DTQurrat Ul AinBelum ada peringkat
- W10 - Module 008 Linear Regression and CorrelationDokumen6 halamanW10 - Module 008 Linear Regression and CorrelationCiajoy KimBelum ada peringkat
- Efficient Parallel Non-Negative Least Squares On Multi-Core ArchitecturesDokumen16 halamanEfficient Parallel Non-Negative Least Squares On Multi-Core ArchitecturesJason StanleyBelum ada peringkat
- RME Repeated Part - BDokumen11 halamanRME Repeated Part - BsaravananBelum ada peringkat
- BA TutorialDokumen37 halamanBA TutorialstcaseBelum ada peringkat
- AI Lab PracticalsDokumen34 halamanAI Lab PracticalsHîмanî JayasBelum ada peringkat
- Large Margin Classification Using The Perceptron Algorithm: Machine Learning, 37 (3) :277-296, 1999Dokumen19 halamanLarge Margin Classification Using The Perceptron Algorithm: Machine Learning, 37 (3) :277-296, 1999Saiful Nur BudimanBelum ada peringkat
- 6 A Dynamic LVQ Algorithm For Improving The Generalisation of Nearest Neighbour ClassifiersDokumen12 halaman6 A Dynamic LVQ Algorithm For Improving The Generalisation of Nearest Neighbour ClassifiersFadhillah AzmiBelum ada peringkat
- Fitting NR LuxDokumen29 halamanFitting NR LuxUdit GuptaBelum ada peringkat
- Gretlcli HLPDokumen85 halamanGretlcli HLPAlex Tarqui QuispeBelum ada peringkat
- TutorialDokumen19 halamanTutorialRicardo XixaBelum ada peringkat
- SAS Annotated OutputDokumen8 halamanSAS Annotated OutputzknightvnBelum ada peringkat
- Neural Networks Report HW2: Pripoae Serbanescu MihaiDokumen5 halamanNeural Networks Report HW2: Pripoae Serbanescu MihaiCreepy ChaosBelum ada peringkat
- 11.7 Improving Eigenvalues And/or Finding Eigenvectors by Inverse IterationDokumen3 halaman11.7 Improving Eigenvalues And/or Finding Eigenvectors by Inverse IterationVinay GuptaBelum ada peringkat
- Molecular Modelling: Lecture 2: Geometry Optimization and Brief Repetition of Statistical ThermodynamicsDokumen9 halamanMolecular Modelling: Lecture 2: Geometry Optimization and Brief Repetition of Statistical ThermodynamicsDushyant PatelBelum ada peringkat
- Pattern Recognition Machine Learning: Chapter 3: Linear Models For RegressionDokumen48 halamanPattern Recognition Machine Learning: Chapter 3: Linear Models For RegressionHarish Kumar J100% (1)
- Chapter 4 Constrained Optimization: FX XR GX HX U M V PNDokumen5 halamanChapter 4 Constrained Optimization: FX XR GX HX U M V PNtamann2004Belum ada peringkat
- Report Batch 7Dokumen9 halamanReport Batch 7NandhakumarBelum ada peringkat
- Constructivism, Technology, and The Future of Classroom LearningDokumen11 halamanConstructivism, Technology, and The Future of Classroom LearningManuela IvancuBelum ada peringkat
- Verb To BeDokumen2 halamanVerb To BeDébora GonçalvesBelum ada peringkat
- Spu RsDokumen25 halamanSpu RsIvo RodriguesBelum ada peringkat
- DemographyDokumen47 halamanDemographyIvo RodriguesBelum ada peringkat
- Introduction and Basic Concepts: (Iii) Classification of Optimization ProblemsDokumen19 halamanIntroduction and Basic Concepts: (Iii) Classification of Optimization Problemsaviraj2006Belum ada peringkat
- Cantilever Discussion and ResultDokumen12 halamanCantilever Discussion and ResultYewHang SooBelum ada peringkat
- Motion in A Straight Line: Imp. September - 2012Dokumen3 halamanMotion in A Straight Line: Imp. September - 2012nitin finoldBelum ada peringkat
- Viscoelastic Modeling of Flexible Pavement With Abaqus PDFDokumen143 halamanViscoelastic Modeling of Flexible Pavement With Abaqus PDFcabrel TokamBelum ada peringkat
- Tugas Ujian FIXDokumen3 halamanTugas Ujian FIXNofi RahmayantiBelum ada peringkat
- Seismic Actions For Designing Geotechnical Works - Iso23469: Susumu IAIDokumen3 halamanSeismic Actions For Designing Geotechnical Works - Iso23469: Susumu IAIrmm99rmm99Belum ada peringkat
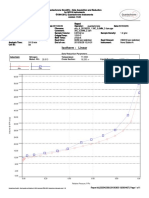
- GraphIsotherm Linear STTN - A - 20150226 - 1 30C - 0,5MM - 3 JamDokumen1 halamanGraphIsotherm Linear STTN - A - 20150226 - 1 30C - 0,5MM - 3 JamYunus HidayatBelum ada peringkat
- Mathematical Expectation FormulasDokumen11 halamanMathematical Expectation FormulasSirfoolBelum ada peringkat
- Luigia Binda-Learning From Failure - Long-Term Behaviour of Heavy Masonry Structures - WIT Press (2008) PDFDokumen248 halamanLuigia Binda-Learning From Failure - Long-Term Behaviour of Heavy Masonry Structures - WIT Press (2008) PDFFerenczi Z. SámuelBelum ada peringkat
- 4 ESO Academics - Unit 01 - Exercises 1.2.Dokumen10 halaman4 ESO Academics - Unit 01 - Exercises 1.2.GoheimBelum ada peringkat
- Acceleration Lab ReportDokumen5 halamanAcceleration Lab ReportRa Raul0% (1)
- ANSYS Polystat Users GuideDokumen180 halamanANSYS Polystat Users GuideShady Adel AliBelum ada peringkat
- AL6061 SiCDokumen36 halamanAL6061 SiCmayankBelum ada peringkat
- 2.2 - Mathematical Modeling & Transfer Function PDFDokumen25 halaman2.2 - Mathematical Modeling & Transfer Function PDFFatinnnnnn100% (1)
- Surface Roughness Review in Ultra-Precision MachiningDokumen53 halamanSurface Roughness Review in Ultra-Precision MachiningEmpresaSTIBelum ada peringkat
- Air Bearing 1Dokumen30 halamanAir Bearing 1YashOdeepAthawaleBelum ada peringkat
- Systematic Approach To Planning Monitoring Program Using Geotechnical InstrumentationDokumen19 halamanSystematic Approach To Planning Monitoring Program Using Geotechnical InstrumentationKristina LanggunaBelum ada peringkat
- Basic Concepts: Partial Differential Equations (Pde)Dokumen19 halamanBasic Concepts: Partial Differential Equations (Pde)Aztec MayanBelum ada peringkat
- Dynamic Model of Unit 1 of Ataturk Hydro Power Plant in TurkeyDokumen5 halamanDynamic Model of Unit 1 of Ataturk Hydro Power Plant in TurkeyEdgar ReisBelum ada peringkat
- Gas Chromatography & Liquid Chromatography: Dr. Jenny Jacob School of Bioscience MacfastDokumen31 halamanGas Chromatography & Liquid Chromatography: Dr. Jenny Jacob School of Bioscience MacfastJenny Jose100% (1)
- Nonlinear Continuum Mechanics Nonlinear Continuum Mechanics: 2. MotionDokumen68 halamanNonlinear Continuum Mechanics Nonlinear Continuum Mechanics: 2. Motionahmadomar89Belum ada peringkat
- Qualification of Innovative Floating Substructures For 10MW Wind Turbines and Water Depths Greater Than 50mDokumen41 halamanQualification of Innovative Floating Substructures For 10MW Wind Turbines and Water Depths Greater Than 50mjuho jungBelum ada peringkat
- Presentation On Reinforcing Detailing of R.C.C MembersDokumen29 halamanPresentation On Reinforcing Detailing of R.C.C Membersamitwwe007Belum ada peringkat
- Solutions To Mathematics 17 Exercises On Systems of Equations PDFDokumen6 halamanSolutions To Mathematics 17 Exercises On Systems of Equations PDFMichael Christian BaysauliBelum ada peringkat
- DB Concept NehasishDokumen23 halamanDB Concept NehasishNehasish SahuBelum ada peringkat
- EPFL Lectures On Conformal Field Theory in D 3 DimensionsDokumen68 halamanEPFL Lectures On Conformal Field Theory in D 3 DimensionsMojeime Igor NowakBelum ada peringkat