Anda mungkin juga menyukai
- Hornos de CalDokumen4 halamanHornos de CalGabriela CormaBelum ada peringkat
- Interpretación Marxista de La Historia de Chile IDokumen319 halamanInterpretación Marxista de La Historia de Chile Igerman mendoza100% (2)
- 3508 GENERATOR SET ENGINE 1ZF00001-UP (SEBP1771 - 02) Aceite y FluidDokumen10 halaman3508 GENERATOR SET ENGINE 1ZF00001-UP (SEBP1771 - 02) Aceite y FluidZobeida RizoBelum ada peringkat
- Medición de Presión DiferencialDokumen42 halamanMedición de Presión DiferencialAugusto Viera ZapataBelum ada peringkat
- Tipos de Pisos TrujilloDokumen26 halamanTipos de Pisos TrujilloLLakelyne RojasBelum ada peringkat
- Catalogo Eni I-SigmaDokumen14 halamanCatalogo Eni I-SigmaGabriela AshleyBelum ada peringkat
- Guía #1 Instrumento de Imán Permanente Y Bobina Móvil (Ipbm)Dokumen6 halamanGuía #1 Instrumento de Imán Permanente Y Bobina Móvil (Ipbm)Marcelo GonBelum ada peringkat
- Caso Whole Food Market - Juliana Castaño, Cristian Restrepo, Maria Fernanda Gomez (COMPLETO)Dokumen9 halamanCaso Whole Food Market - Juliana Castaño, Cristian Restrepo, Maria Fernanda Gomez (COMPLETO)cdrm04Belum ada peringkat
- Cotizacion ImpexDokumen5 halamanCotizacion ImpexFranklin Gonzalo Vejarano FerrerBelum ada peringkat
- Problemas ResueltosDokumen11 halamanProblemas ResueltosXtrad AngelousBelum ada peringkat
- Tomo II Tarifa ABB 2014Dokumen664 halamanTomo II Tarifa ABB 2014Javier CarrizoBelum ada peringkat
- Cahors WebDokumen12 halamanCahors WebArantza CiruelosBelum ada peringkat
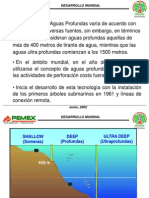
- Aguas ProfundasDokumen81 halamanAguas ProfundasFernando Montes de OcaBelum ada peringkat
- Informes de Laboratorio de ConcentraciónDokumen50 halamanInformes de Laboratorio de ConcentraciónIsmael Mamani ChBelum ada peringkat
- Reglamento Ambiental InternoDokumen6 halamanReglamento Ambiental InternoJefe Ssoma GytresBelum ada peringkat
- Informe Diseño de Mezcla FC 100Dokumen10 halamanInforme Diseño de Mezcla FC 100CarlosBarbaranVizcarraBelum ada peringkat
- Resultados análisis lubricante motorDokumen2 halamanResultados análisis lubricante motorroger gonzales hoyosBelum ada peringkat
- Localizacion y Distribucion de PlantaDokumen48 halamanLocalizacion y Distribucion de PlantaVERONICA ISABEL MIRANDA CRAVIOTOBelum ada peringkat
- HDS Permatex 26C High Temp RTV SiliconeDokumen3 halamanHDS Permatex 26C High Temp RTV Siliconeoscar gonzalez manquezBelum ada peringkat
- Memoria Descriptiva Instalaciones Sanitarias - Módulo 6.00x7.00m.Dokumen7 halamanMemoria Descriptiva Instalaciones Sanitarias - Módulo 6.00x7.00m.LUISBelum ada peringkat
- Informe Lab N°12Dokumen12 halamanInforme Lab N°12Edison JhonBelum ada peringkat
- Guión de Clase Emprendendedurismo IIDokumen44 halamanGuión de Clase Emprendendedurismo IIRoberto EspinozaBelum ada peringkat
- Formato Tesis Unidad 2Dokumen42 halamanFormato Tesis Unidad 2Cris AlvaradoBelum ada peringkat
- Superslim and ULTRAGUARD Tech Data PDFDokumen21 halamanSuperslim and ULTRAGUARD Tech Data PDFjaimedemarcoBelum ada peringkat
- Siding RevestimientoDokumen8 halamanSiding RevestimientoANA TIATIRABelum ada peringkat
- El Carbono y Sus Formas AlotropicasDokumen7 halamanEl Carbono y Sus Formas Alotropicasbiancadamica2007Belum ada peringkat
- Análisis de Ensayos de ILSS de Probetas de Material Compuesto Reforzadas Con Fibra Continua Producidas Mediante Impresión 3DDokumen5 halamanAnálisis de Ensayos de ILSS de Probetas de Material Compuesto Reforzadas Con Fibra Continua Producidas Mediante Impresión 3DChristopher Alexis Cuenca MeraBelum ada peringkat
- Reporte Destilacion Lopu 2Dokumen52 halamanReporte Destilacion Lopu 2Salazar SalazarBelum ada peringkat
- Guía de Pavimentos y TerraceríasDokumen5 halamanGuía de Pavimentos y TerraceríasMaryPérezBelum ada peringkat
- Cuidado instrumental quirúrgicoDokumen8 halamanCuidado instrumental quirúrgicoTomás ReneroBelum ada peringkat