!! Montagem e Modelagem de Um Grupo Gerador Síncrono - Turbina Hidráulica para Seu Estudo e Operação em Micro Centrais Hidr
Diunggah oleh
Melissa SuttonJudul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
!! Montagem e Modelagem de Um Grupo Gerador Síncrono - Turbina Hidráulica para Seu Estudo e Operação em Micro Centrais Hidr
Diunggah oleh
Melissa SuttonHak Cipta:
Format Tersedia
X SBAI Simpsio Brasileiro de Automao Inteligente 18 a 21 de setembro de 2011 So Joo del-Rei - MG - Brasil
MONTAGEM E MODELAGEM DE UM GRUPO GERADOR SNCRONO TURBINA HIDRULICA PARA SEU ESTUDO E OPERAO EM MICRO CENTRAIS HIDROELTRICAS PARA PEQUENOS SISTEMAS ISOLADOS JOS DENTI FILHO, LVARO CHRISTIAN MONTAO SAAVEDRA1 1. Laboratrio de Controle Inteligente, Departamento de Engenharia Eltrica,UFES Av. Fernando Ferrari, 514, CEP 29075 910, Vitria - ES E-mails: jdenti@ele.ufes.br, ecotecelm@yahoo.com
Abstract This work presents the assembly and modeling of a plant constituted by one turbine and one synchronous generator to function as a part of a Micro Hydroelectric Plant (MHP) for small isolated systems. Once the assembly of the plant at the laboratory was constructed, has started the developing of an empirical model of the process in the form of reaction curves, obtained by the use of the step response technique that allowed the approximation of the main variables involved in a first order with dead time model. After obtaining the transfer functions of the plant, a PID controller was designed in order to maintain the output voltage of the generator on an appropriate reference value for electrical distribution in the network of the isolated electric system. With the purpose of validate the simulation results, curves of response were obtained from the real system in the laboratory and were compared to both responses, giving a satisfactory and very similar result. These results will functionate as a basis for further studies in the areas of speed control (or charge controller) and system stability, among others, in the field of MHPs for small isolated systems. Keywords MHP, assembly, modeling, isolated system, AVR, sigmoidal curve, tune. Resumo O trabalho apresenta a montagem e modelagem de uma planta formada por uma turbina hidrulica e um gerador sncrono para seu funcionamento como parte de uma Micro Central Hidroeltrica (MCH) para pequenos sistemas isolados. Uma vez feita a montagem da planta em laboratrio, partiu-se para o desenvolvimento de um modelo emprico do processo, na forma de curvas de reao, obtidas utilizando-se a tcnica de resposta ao degrau; e que possibilitou a aproximao das variveis principais envolvidas para um modelo de primeira ordem com tempo morto. Depois de obtidas as funes de transferncia da planta, projetou-se um controlador PID com a finalidade de manter a tenso de sada do gerador a um valor de referncia adequado para a sua distribuio na rede eltrica no sistema isolado. A seguir, com a finalidade de validar os resultados obtidos nas simulaes, obtiveram-se curvas de resposta do sistema real em laboratrio e compararam-se ambas as respostas, dando um resultado satisfatrio e muito parecido. Estes resultados serviro como base para futuros estudos nas reas de controle de velocidade (ou governador de carga) e estabilidade do sistema, entre outros, no campo das MCHs para pequenos sistemas isolados. Palavras-chave MCH, montagem, modelagem, sistema isolado, AVR, curva sigmoidal, sintonia.
Introduo
Em um sistema isolado, o grupo turbina hidrulica gerador precisa para o seu correto funcionamento de governadores ou controladores que o mantenham funcionando a valores nominais de operao. As variaes na potncia real (ou ativa) afetam principalmente freqncia do sistema, enquanto que variaes na potncia reativa afetam principalmente a amplitude da tenso. Portanto, possvel controlar a potncia ativa e reativa de maneira independente. A malha de controle de potencia real freqncia LFC (load frequency control), controla a potncia real e a freqncia (velocidade de rotao do gerador); enquanto que a malha do regulador automtico de tenso ou de potncia reativa tenso AVR (automatic voltage regulator) regula a potncia reativa e a amplitude da tenso. Mudanas na potncia real podem ser feitas atravs do ngulo do rotor e, por conseguinte, da freqncia; a potncia reativa pode ser controlada atravs da tenso de excitao do gerador (Vanfretti, 2005). A funo bsica de um sistema de excitao de prover a corrente contnua ao enrolamento de campo de uma mquina sncrona. Alm disso, o sistema de excitao desempenha funes de controle e proteo
essenciais para o funcionamento satisfatrio do sistema de potncia atravs do controle da tenso de campo, e por conseqente, da corrente de campo. As funes de controle incluem o controle da tenso e da potncia reativa, como tambm o melhoramento da estabilidade do sistema (Vanfretti, 2007). Os controladores eletrnicos de velocidade (ou governadores de carga) se utilizam em pequenas centrais e sistemas isolados; estes mantm a velocidade do conjunto turbina gerador constante desviando para um dissipador (aquecedor de gua ou ar) toda a energia eltrica que no esteja sendo consumida. Somando as turbinas hidrulicas, os geradores, os controladores de tenso e de freqncia, e os painis de controle, podem-se montar grupos completos de gerao hidroeltrica. Neste trabalho apresentado o processo de identificao dos parmetros e a obteno do modelo dinmico da planta, definida como o conjunto turbina hidrulica gerador eltrico, a partir de provas experimentais em laboratrio em uma planta montada para tal finalidade; para depois desenvolver a sintonia do controlador de tenso de sada da energia eltrica gerada, com o objetivo de ter um modelo que sirva como base para futuras pesquisas sobre desenvolvimento e projeo dos controladores eletrnicos
ISSN: 2175-8905 - Vol. X
356
X SBAI Simpsio Brasileiro de Automao Inteligente 18 a 21 de setembro de 2011 So Joo del-Rei - MG - Brasil
de freqncia, estabilidade do sistema, entre outras, em pequenos sistemas isolados. 2 Elementos da planta montada 2.1 Gerador O gerador sncrono do tipo BRUSHLESS, de trs fases com conexo em estrela com ponto neutro; uma tenso de linha de 380 V e tenso de fase de 220 V, freqncia de 50 Hz (de fabricao peruana) e fator de potncia de 0.8.
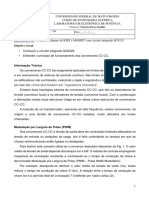
2.3 Planta montada Na figura 4 mostra-se o esquema da planta que foi montada para realizar a experimentao; deve-se notar que todas as provas foram feitas a velocidade constante, com ajuda de um governador eletrnico de carga (f = cte.); isto foi feito devido a que o sistema basicamente um sistema linearmente independente, ou seja, que o controle de tenso e de velocidade pode ser feito de forma independente. Se no tivesse sido usado o governador de velocidade teramos obtido dados que no refletiriam o comportamento real do gerador, devido a que a resposta tambm estaria influenciada pela inrcia dos demais componentes da planta (p.e. a turbina hidrulica).
Figura 1. Sistema de excitao do gerador sem escovas
Na figura 2 apresentada a estrutura do regulador de tenso.
Figura 4. Sistema montado no laboratrio
3 Obteno do modelo dinmico 3.1 Mtodo de identificao dinmica atravs do teste degrau Para a identificao das caractersticas essenciais de um processo sob avaliao, possvel utilizar uma entrada degrau. Assim, o chaveamento abrupto atravs de um acrscimo ou decrscimo na magnitude do degrau pode ser estabelecido em nosso caso pela variao da tenso de excitao. Em Coelho e Coelho (2004) define-se um sistema linear por meio da sua resposta ao degrau para diferentes amplitudes no sinal de entrada (teorema da superposio): um sistema linear se a forma (curva) da resposta ao degrau no depende da amplitude do sinal de entrada, o que cumprido pelas provas feitas. Os parmetros a serem estimados dos resultados obtidos de um teste degrau so: o ganho do processo, a constante de tempo e o tempo morto. 3.2 Obteno do modelo de primeira ordem com tempo morto Um modelo uma representao matemtica de um sistema. Por ser um anlogo matemtico do sistema, espera-se que o modelo seja representativo das principais caractersticas do sistema real (Aguirre, 2007). Dado que o sistema pode sofrer perturbaes tanto positivas quanto negativas (ligamento ou desligamento da carga eltrica sada do gerador), neste estudo utilizaram-se degraus positivos e negativos
Figura 2. Diagrama de blocos do AVR.
O funcionamento do AVR baseado na comparao do valor eficaz da tenso de realimentao com a referncia de tenso, ajustada pela soma do trimpot de ajuste de tenso com o trimpot externo. O erro processado pela malha de realimentao cujo valor determina o ngulo de disparo do tiristor que pode variar de 0 a 180, controlando desta forma a tenso de sada do gerador. Com zero graus de disparo temse zero volts na sada do retificador, e com disparo de 180 graus, tem-se a sada mxima dada pelo retificador de meia onda. 2.2 Turbina hidrulica Nas provas em laboratrio foi usada uma turbina tipo Banki, que admitia uma vazo mxima de 30 [l/s], desenhada para uma altura de 40 [m] e com uma potncia no eixo de 8 [kW].
Figura 3. Turbina hidrulica tipo Banki
ISSN: 2175-8905 - Vol. X
357
X SBAI Simpsio Brasileiro de Automao Inteligente 18 a 21 de setembro de 2011 So Joo del-Rei - MG - Brasil
com a finalidade de observar o comportamento da planta diante estas perturbaes. Portanto, obtiveramse duas funes de transferncia que descrevem a dinmica do processo. Existem vrios mtodos para estimar a constante de tempo de um processo e o tempo morto a partir da resposta ao degrau. O primeiro destes mtodos foi proposto originalmente por Ziegler e Nichols. Podemos chamar este mtodo de mtodo da tangente. Outros dois mtodos, o mtodo do ponto e da tangente e o mtodo dos dois pontos, do resultados mais prximos. Em Corripio (2001) encontra-se que o mtodo dos dois pontos resulta em uma estimao mais alta do tempo morto e uma estimao mais baixa da constante de tempo do processo em comparao com os outros dois mtodos; entretanto, o mtodo da tangente o outro extremo. Portanto, decidiu-se por utilizar o mtodo do ponto e da tangente. 3.3 Respostas da planta ao teste degrau sem AVR e obteno das funes de transferncia Levantaram-se as funes de transferncia pelo registro das curvas de reao da tenso de sada do gerador frente a degraus aplicados tenso de excitao do campo. Na figura 5 o circuito utilizado para realizar as provas mostrado.
Tomam-se s os dados do segundo degrau, devido a que se supe que a planta ir trabalhar em uma faixa entre 190 240 [Vac] que so os valores recomendados pelo fabricante do AVR para que este trabalhe corretamente, pode se fazer uma aproximao da curva com rudo por uma curva sigmoidal (Ferreira, 2000) segundo mostrado na figura 7.
Figura 7. Curva de reao do sistema e obteno dos parmetros para a modelagem do processo
A seguir, podemos ver uma tabela resumo de todas as funes de transferncia encontradas nos distintos testes.
Tabela 1. Resultados das respostas do processo ao teste degrau
Figura 5. Circuito para teste
Fizeram-se vrias provas, tanto para degraus negativos quanto para positivos; na figura 6 pode se ver a resposta do sistema ao degrau positivo.
Figura 6. Degraus positivos na tenso de excitao e resposta do sistema
ISSN: 2175-8905 - Vol. X
358
X SBAI Simpsio Brasileiro de Automao Inteligente 18 a 21 de setembro de 2011 So Joo del-Rei - MG - Brasil
4 Modelo proposto para o controlador de tenso 4.1 Sistema de controle em malha fechada Uma descrio detalhada do diagrama funcional do sistema de controle em malha fechada (SCMF) dada na figura 8. Este diagrama mostra os principais componentes do sistema de controle, sendo: o o o Referncia (SP): Valor desejado da varivel a ser controlada. Comparador: Dispositivo que constri o sinal de erro entre o valor desejado e o obtido. Controlador: Dispositivo que manipula o sinal de erro, gerando um sinal de controle que ser aplicado no sistema, com a finalidade de corrigir a varivel a ser controlada. Atuador: Dispositivo que recebe o sinal de controle e gera um sinal com potncia suficiente para atuar sobre o sistema. Sistema: Dispositivo ou fenmeno que se deseja operar com alguma finalidade (objetivo de controle). Medidor (transdutor): Dispositivos responsveis pela medio e converso da varivel a ser controlada para fins de comparao e obteno do erro de sada. Output to Process (OP): a ao ou sinal de sada do controlador, para nosso caso, a tenso de excitao do gerador (Edc). Process Variable (PV): a varivel do processo ou varivel controlada, que em nosso caso a tenso gerada (Vac). Manipulate Variable (MV): a varivel manipulada atravs do atuador, para nosso caso, a intensidade de campo magntico para poder gerar a FEM induzida.
mostra o Pu para as funes de transferncia obtidas na tabela 1.
Tabela 2. Controlabilidade dos testes realizados
Os parmetros estimados do teste 6 do como resultado um Pu 1 , isto pode ser por causa de muitas razes, como por exemplo a m recolha dos dados quando feito o teste, uso incorreto do registrador, erro dos instrumentos de medio, etc. Portanto, exclumos os dados do teste 6 para os futuros clculos. 4.3 Sintonia do controlador Segundo Astrom (1995) o controlador PID de longe o algoritmo mais comum de controle. Como mostrado na figura 2, o AVR tem incorporado um controlador PI, porm, devido ao tempo rpido de resposta do sistema com AVR, decidiu-se por usar um controlador PID paralelo para poder representar de uma maneira mais prxima o comportamento real do AVR operando juntamente com a planta (gerador - turbina hidrulica). Como a finalidade obter uma sintonia rpida e simples do sistema de controle, utilizamos um dos mtodos mais simples e efetivos proposto para realizar a sintonia de controladores com realimentao (Corripio, 2001). Este mtodo conhecido como regras de sintonia IMC (Internal Model Control) e foi originalmente introduzido com o nome de controller synthesis em Martin (1976). Para o modelo do processo de primeira ordem mais atraso, as regras IMC de sintonia consistem em fazer o tempo integral ( Ti ) igual constante de tempo ( ) do processo e o tempo derivativo ( TD ) igual a metade do tempo morto ( ) do processo. O ganho do processo ( K P ) depois ajustado para obter a resposta desejada. Para uma boa resposta a distrbios, quando Pu estiver entre 0,1 e 0,5, usar a frmula:
Figura 8. Diagrama do sistema de controle malha fechada
4.2 Estratgia de controle utilizada A controlabilidade da malha decresce quando a taxa entre o tempo morto do processo e sua constante de tempo se incrementa. Agora se pode definir o parmetro de incontrolabilidade ( Pu ) da malha como:
Pu =
(1)
Em Corripio (2001) um processo com um longo tempo morto ser incontrolvel se a sua constante de tempo for muito maior do que o tempo morto. Para valores do parmetro de incontrolabilidade maiores do que 1, o sistema ser incontrolvel. A tabela 2
Kp =
2 K
(2)
ISSN: 2175-8905 - Vol. X
359
X SBAI Simpsio Brasileiro de Automao Inteligente 18 a 21 de setembro de 2011 So Joo del-Rei - MG - Brasil
Quando Pu for menor do que 0,1 ou maior do que 0,5 deve se usar s a metade do ganho como o valor inicial. Para uma resposta tima a variaes no set point, quando Pu estiver na faixa 0,1 a 0,5 e para um controlador PID usa-se a frmula:
Depois, optou-se por ter uma nica funo de transferncia, tanto para o teste com degrau positivo quanto para o teste com degrau negativo; para isto obtiveram-se os valores mdios de cada um dos parmetros das funes de transferncia.
Tabela 4. Funes de transferncia com as unidades adaptadas
Kp =
0,83 K
(3)
As frmulas acima confirmam a idia de que o ganho do controlador pode ser ajustado para obter vrios tipos de resposta. 4.4 Estruturas do modelo do processo Antes de definir as estruturas do modelo e fazer a sintonia do controlador, deve-se adaptar as unidades das funes de transferncia encontradas, isto , o ganho adimensional (% / %), e em minutos. Para isto se utiliza a seguinte relao:
K (%) = K
(u 2 u1 ) [% / %] ( y2 y1 )
(4)
Os valores de y1 e y2 (240 [Vac] e 190 [Vac] respectivamente) formam a faixa de operao recomendada pelo fabricante do AVR para uma correta operao do mesmo e sem que este sofra danos. Conseqentemente, os valores de u1 e u 2 so obtidos a partir desses valores.
Tabela 3. Funes de transferncia com as unidades adaptadas
A primeira estrutura prope a utilizao de duas funes de transferncia, e a partir delas, fazer a sintonia dos controladores PID para cada uma delas. Enquanto a segunda estrutura de controle prope que, na identificao experimental do processo, ao se repetir um teste degrau positivo e outro negativo, uma mdia dos parmetros pode ser obtida. Na tabela 5 pode se ver um resumo das funes utilizadas nas duas estruturas.
Tabela 5. Funes obtidas para as diferentes estruturas de controle
5 Resultados na planta real A figura 9 mostra o diagrama de blocos da planta utilizada para fazer os testes; j na figura 10 apresentam-se as conexes do AVR para dar o degrau na tenso de excitao.
Figura 9. Malha fechada submetida variao no SP
ISSN: 2175-8905 - Vol. X
360
X SBAI Simpsio Brasileiro de Automao Inteligente 18 a 21 de setembro de 2011 So Joo del-Rei - MG - Brasil
Figura 12. Resposta do sistema ao degrau negativo no SP Figura 10. Diagrama de conexo do AVR
J nas figuras 13 e 14 apresentam-se as respostas obtidas para a segunda estrutura de controle.
Como visto acima, os pinos 6 e 7 do AVR so utilizados para fazer um ajuste externo da tenso de referncia (SP); neles foi instalado uma chave comutadora que tinha duas posies, uma para colocar os pinos em curto-circuito e o outro para conectar uma resistncia de 1 [k]. Deve-se mencionar que inicialmente ao gerador estavam ligadas cargas eltricas externas (resistncias de ar e lmpadas), isto para poder ter um funcionamento correto do AVR e poder atingir os valores nominais sem problemas. Na figuras 11 e 12 apresentam-se as respostas obtidas ao degrau positivo e negativo nas simulaes e nos testes na planta real para a primeira estrutura de controle.
Figura 13. Resposta do sistema ao degrau positivo no SP obtida com a segunda estrutura de controle
Figura 11. Resposta do sistema ao degrau positivo no SP
Figura 14. Resposta do sistema ao degrau negativo no SP obtida com a segunda estrutura de controle
ISSN: 2175-8905 - Vol. X
361
X SBAI Simpsio Brasileiro de Automao Inteligente 18 a 21 de setembro de 2011 So Joo del-Rei - MG - Brasil
Figura 15. Planta para experimentao
6 Concluso Neste artigo apresentado o modelo obtido experimentalmente da planta (gerador turbina hidrulica) e o controlador PID projetado usado para controlar a tenso de sada da energia eltrica gerada, que demonstraram ter um comportamento dinmico muito prximo com a planta real. Ento mostrado que uma funo de transferncia de primeira ordem com tempo morto pode representar o comportamento do processo de forma satisfatria. O trabalho feito poder ser a base para futuros trabalhos no que se refere a pesquisas nas reas de controle de velocidade, estabilidade do sistema, entre outros, no campo das Micro Centrais Hidroeltricas. Agradecimentos Os autores gostariam de agradecer ao IHH UMSA (La Paz - Bolvia) e ao CNPq. Referncias Bibliogrficas Aguirre, L., 2007, Introduo Identificao de Sistemas, UFSC, Brasil. Astrm, K e Hgglund, T., 1995, PID Controllers: Theory, Design and Tuning, ISA, USA. Coelho, A e Coelho, L., 2004, Identificao de Sistemas Dinmicos Lineares, UFSC, Brasil. Corripio, A., 2001, Tuning of Industrial Control Systems, ISA, USA. Ferreira, E., 2000, Proposta de Controle para uma Coluna de Destilao Didtica, UFES, Brasil. Martin, J Jr., 1976, How to Select Controller Modes and Tuning Parameters from Simple Process Models, ISA Transactions, Vol. 15, pp. 314-19. Vanfretti, L., 2005, Modelacin y Simulacin de la Mquina Sncrona y su Operacin en Sistemas de Potencia, USAC, Guatemala. Vanfretti, L., 2007, Sistemas de Control de Excitacin y Estabilizadores de Sistemas de Potencia, RPI, USA.
ISSN: 2175-8905 - Vol. X
362
Anda mungkin juga menyukai
- Céus Caninos DefensoresDokumen3 halamanCéus Caninos DefensoresAlessandro Cater D. MarquesBelum ada peringkat
- Medindo Vibração GuiaDokumen46 halamanMedindo Vibração GuiaFelipe PimentaBelum ada peringkat
- A visão extraordinária de levar o Homem à LuaDokumen4 halamanA visão extraordinária de levar o Homem à LuaAna MartinsBelum ada peringkat
- Oferta de conselhos e reflexões sobre a vidaDokumen12 halamanOferta de conselhos e reflexões sobre a vidaFatima4BretzBelum ada peringkat
- Neurotransmissores, Neuroreceptores e Neuromoduladores.Dokumen9 halamanNeurotransmissores, Neuroreceptores e Neuromoduladores.Júnia CarvalhoBelum ada peringkat
- Pesquisa de Campo - 220621Dokumen12 halamanPesquisa de Campo - 220621Fernanda CfBelum ada peringkat
- Agro Foester Produtos Agricolas e Veterinários LTDA - PGRDokumen25 halamanAgro Foester Produtos Agricolas e Veterinários LTDA - PGRAmarildo paixaoBelum ada peringkat
- Vagão Forrageiro ManualDokumen82 halamanVagão Forrageiro ManualTORNEARIA LIPPERTBelum ada peringkat
- Estudo Dirigido (A1) - Saneamento. GABARITODokumen2 halamanEstudo Dirigido (A1) - Saneamento. GABARITOandersonBelum ada peringkat
- Manutenção de equipamento de ar condicionadoDokumen1 halamanManutenção de equipamento de ar condicionadoAnonymous FZs3yBHh7Belum ada peringkat
- Exercício de Revisão 9 AnoDokumen4 halamanExercício de Revisão 9 AnoJéssica LayneBelum ada peringkat
- A Importância Dos Lubrificantes Automóveis - ROCHA PNEUS - 1621833714923Dokumen5 halamanA Importância Dos Lubrificantes Automóveis - ROCHA PNEUS - 1621833714923JULIOBelum ada peringkat
- G Series Catalogo ROSSI PTDokumen482 halamanG Series Catalogo ROSSI PTViniciusBelum ada peringkat
- DESCRITOR 3 - SimuladoDokumen3 halamanDESCRITOR 3 - SimuladoIsabel RothBelum ada peringkat
- Medidas GoreanasDokumen36 halamanMedidas GoreanasPetrov YatsenkoBelum ada peringkat
- Regulamento de Urbanização e EdificaçãoDokumen35 halamanRegulamento de Urbanização e EdificaçãoAnonymous wXNVIXbUBelum ada peringkat
- Psicologia e ReligiãoDokumen7 halamanPsicologia e ReligiãoFranciscoWalissonBelum ada peringkat
- Circuito SG3525 conversor CC-CCDokumen7 halamanCircuito SG3525 conversor CC-CCNikolas Augusto100% (1)
- 1 Estudo Dirigido HDIDokumen8 halaman1 Estudo Dirigido HDIJullyana BorbaBelum ada peringkat
- Folha Dízima 8º AnoDokumen1 halamanFolha Dízima 8º AnoFrancisco UlissesBelum ada peringkat
- ATIVIDADE PhET SOBRE ELETRODINÂMICA - 2Dokumen6 halamanATIVIDADE PhET SOBRE ELETRODINÂMICA - 2Roberto VítorBelum ada peringkat
- Ventilador pulmonar VLP 6000 para emergênciasDokumen1 halamanVentilador pulmonar VLP 6000 para emergênciasailson.marins sl98104120Belum ada peringkat
- Projeto Aprendendo A ConviverDokumen3 halamanProjeto Aprendendo A ConviverdirleneBelum ada peringkat
- As 10 Formações Mais Bem Sucedidas de Saint SeiyaDokumen6 halamanAs 10 Formações Mais Bem Sucedidas de Saint SeiyaTreinar CapacitarBelum ada peringkat
- Prova Eags 2023 Cod 20 PDF Rede Elétrica FuDokumen2 halamanProva Eags 2023 Cod 20 PDF Rede Elétrica FuFabio HorsayBelum ada peringkat
- Apostila de Geometria Analítica (Professor)Dokumen27 halamanApostila de Geometria Analítica (Professor)Leonardo Tizatto WeinfurterBelum ada peringkat
- Ficha 4283Dokumen2 halamanFicha 4283JORCY DE CARVALHO ALVES - SDBelum ada peringkat
- Sobonfu Some o Espirito Da Intimidade LegívelDokumen141 halamanSobonfu Some o Espirito Da Intimidade LegívelLuisa ArmazémBelum ada peringkat
- Plano Recuperação Desastres PRDDokumen3 halamanPlano Recuperação Desastres PRDAndersonBelum ada peringkat
- Bruno de Almeida Simoes - 230530 - 192925Dokumen7 halamanBruno de Almeida Simoes - 230530 - 192925Red SunBelum ada peringkat