Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Disk Resonator GyroscopeDokumen3 halamanDisk Resonator Gyroscopeabtin_kameliiBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Department of Mechanical Engineering, Stanford University, Stanford, California, USADokumen4 halamanDepartment of Mechanical Engineering, Stanford University, Stanford, California, USAabtin_kameliiBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Gpon Gpon Gpon GponDokumen79 halamanGpon Gpon Gpon Gponabtin_kameliiBelum ada peringkat
- G50Z Gyro Datasheet 130415Dokumen2 halamanG50Z Gyro Datasheet 130415abtin_kameliiBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Master Thesis DongDokumen132 halamanMaster Thesis DongArun Goutham100% (1)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Serrano Slides Gyros2 2Dokumen39 halamanSerrano Slides Gyros2 2abtin_kameliiBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Development of A MEMS Gyroscope For Absolute Angle MeasurementDokumen6 halamanThe Development of A MEMS Gyroscope For Absolute Angle Measurementabtin_kameliiBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Yole Gyro MU Report Sample September 2012Dokumen18 halamanYole Gyro MU Report Sample September 2012abtin_kamelii100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Yole ST L3G3250 3-Axis Gyroscope April 2012 SampleDokumen17 halamanYole ST L3G3250 3-Axis Gyroscope April 2012 Sampleabtin_kameliiBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- IEEE Standard For Inertial Sensor Terminology: IEEE Aerospace and Electronic Systems SocietyDokumen27 halamanIEEE Standard For Inertial Sensor Terminology: IEEE Aerospace and Electronic Systems Societyabtin_kameliiBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Sidak Hut KluDokumen14 halamanSidak Hut KluparwisBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Electronic PackagingDokumen54 halamanElectronic PackagingAdelle Lyn Carlos100% (1)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Extreme Ultraviolet Lithography Seminar TopicsDokumen25 halamanExtreme Ultraviolet Lithography Seminar TopicsMubashir Ibn alfaBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- CPU and GPU Design TrendsDokumen5 halamanCPU and GPU Design TrendsGabriel DonovanBelum ada peringkat
- Semiconductor Fabrication: Presented by P JaswanthDokumen31 halamanSemiconductor Fabrication: Presented by P JaswanthPullepu JaswanthBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- 62nd ECTC Advance ProgramDokumen32 halaman62nd ECTC Advance Programmuh9904Belum ada peringkat
- Samsung Quality HandbookDokumen20 halamanSamsung Quality Handbookaimtronele18Belum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Fundamentals of CMOS VLSI (Complete Notes) PDFDokumen214 halamanFundamentals of CMOS VLSI (Complete Notes) PDFENG18EC0062-MD TANVEERBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Project of Entrepreneurship: Business Plan of A Start-UpDokumen60 halamanProject of Entrepreneurship: Business Plan of A Start-UpMuhammad SaadBelum ada peringkat
- IC Manufacturing Process: Synopsys University Courseware Chip Design Lecture - 2 Developed By: Vazgen MelikyanDokumen17 halamanIC Manufacturing Process: Synopsys University Courseware Chip Design Lecture - 2 Developed By: Vazgen MelikyanKiệt PhạmBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Mil PRF 131jDokumen20 halamanMil PRF 131jAbdullah PalBelum ada peringkat
- Brochures Jaist PDFDokumen18 halamanBrochures Jaist PDFShafiul143Belum ada peringkat
- Chapter 01 Computer Organization and Design, Fifth Edition: The Hardware/Software Interface (The Morgan Kaufmann Series in Computer Architecture and Design) 5th EditionDokumen49 halamanChapter 01 Computer Organization and Design, Fifth Edition: The Hardware/Software Interface (The Morgan Kaufmann Series in Computer Architecture and Design) 5th EditionPriyanka Meena83% (6)
- CMOS Fabrication ProcessDokumen45 halamanCMOS Fabrication ProcessManasa UpadhyayaBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Leaflet Vyrtych Clean Room enDokumen4 halamanLeaflet Vyrtych Clean Room enLuciano Añorga ArmestarBelum ada peringkat
- Lithography PresentationDokumen16 halamanLithography PresentationNarendra AchariBelum ada peringkat
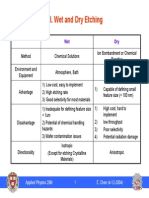
- Erli Chen Fabrication III - EtchingDokumen18 halamanErli Chen Fabrication III - EtchingLuke D'ImperioBelum ada peringkat
- Dead Front Panels Backlit UserDokumen2 halamanDead Front Panels Backlit UserBooknest CoBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Fep - 12 02 03Dokumen20 halamanFep - 12 02 03lkb9999Belum ada peringkat
- Chapter 5 Fabrication of Microelectronic DevicesDokumen35 halamanChapter 5 Fabrication of Microelectronic Devicesmuhamadsaidi60% (5)
- Unit 2 - Fabrication - VinayDokumen37 halamanUnit 2 - Fabrication - VinayApoorvaBelum ada peringkat
- Introduction To VLSI Design: Etching Silicon IngotDokumen11 halamanIntroduction To VLSI Design: Etching Silicon IngotCruise_IceBelum ada peringkat
- 4 - CMOS IC Fabrication ProcessDokumen59 halaman4 - CMOS IC Fabrication Processkrishna chytanyaBelum ada peringkat
- Nanolithography - Processing Methods PDFDokumen10 halamanNanolithography - Processing Methods PDFNilesh BhardwajBelum ada peringkat
- Industry Council White Paper 2 Rev1 March 2009Dokumen140 halamanIndustry Council White Paper 2 Rev1 March 2009Sean CarterBelum ada peringkat
- Liftoff TechniquesDokumen4 halamanLiftoff TechniquesSwarnava SanyalBelum ada peringkat
- Sertifikat Atlm Merged 01Dokumen2.558 halamanSertifikat Atlm Merged 01Batik Dan TenunkuBelum ada peringkat
- Mechanical Project ListDokumen7 halamanMechanical Project ListPavan Kumar BalagamBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Cleaning of Silicon WafersDokumen14 halamanCleaning of Silicon WafersManas KapurBelum ada peringkat
- ECE467: Introduction To VLSI: Physical Structure and Fabrication Process of Integrated CircuitsDokumen38 halamanECE467: Introduction To VLSI: Physical Structure and Fabrication Process of Integrated Circuitssnagaraj.cool7813Belum ada peringkat