Anda mungkin juga menyukai
- Control Lab Manual PDFDokumen40 halamanControl Lab Manual PDFKareem TarekBelum ada peringkat
- LAB-1: PID ControlDokumen17 halamanLAB-1: PID ControlJulio C. SalinasBelum ada peringkat
- Proportional Plus Integral Control For Water Level in A TankDokumen30 halamanProportional Plus Integral Control For Water Level in A TankDioselle CastilloBelum ada peringkat
- DEN5200 CONTROL SYSTEMS ANLAYSIS AND DESIGN ReportDokumen15 halamanDEN5200 CONTROL SYSTEMS ANLAYSIS AND DESIGN Reportsilvia100% (1)
- Manual Instruction: 1. Usage and Performance CharacteristicsDokumen5 halamanManual Instruction: 1. Usage and Performance CharacteristicskolesikBelum ada peringkat
- Level Control (Our Report)Dokumen31 halamanLevel Control (Our Report)Brishti Anwar100% (1)
- Lab 6-CSDokumen8 halamanLab 6-CSkashafBelum ada peringkat
- Lab Manual - Control System EngineeringDokumen39 halamanLab Manual - Control System Engineeringvineetanishad50% (2)
- Process ControlDokumen21 halamanProcess ControlJamie ForsythBelum ada peringkat
- Work Shop (23 HLM)Dokumen23 halamanWork Shop (23 HLM)ferdhian RahmansyahBelum ada peringkat
- Lab Report CompleteDokumen30 halamanLab Report Completefahadfiaz0% (1)
- Case Project - Control System in LabVIEW PDFDokumen15 halamanCase Project - Control System in LabVIEW PDFEslemDriraBelum ada peringkat
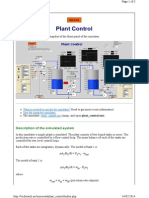
- Techteach - No Simview Plant Control IndexDokumen3 halamanTechteach - No Simview Plant Control IndexDiabloBelum ada peringkat
- Proportional Control For Water Level in A Tank: Experiment No. 1Dokumen5 halamanProportional Control For Water Level in A Tank: Experiment No. 1Dioselle CastilloBelum ada peringkat
- Gilian Gilibrator ManualDokumen25 halamanGilian Gilibrator ManualEvaavivahBelum ada peringkat
- ET401 Lab Self-Regulating Single Tank Level Control: Modeling and Tuning Profs Sarnacki, Owen, Olivari, Tefft Fall 2019Dokumen4 halamanET401 Lab Self-Regulating Single Tank Level Control: Modeling and Tuning Profs Sarnacki, Owen, Olivari, Tefft Fall 2019essameldinBelum ada peringkat
- Control System NotesDokumen179 halamanControl System NotesChandrashekarBelum ada peringkat
- Group 2 - E06 - EXPERIMENT4Dokumen4 halamanGroup 2 - E06 - EXPERIMENT4Dioselle CastilloBelum ada peringkat
- Lab 6-CSDokumen8 halamanLab 6-CSAmir IqbalBelum ada peringkat
- PID Control of Water Level in A Coupled Tank SystemDokumen9 halamanPID Control of Water Level in A Coupled Tank SystemEioAsan100% (1)
- Reporter: John Alvin B. SerenioDokumen25 halamanReporter: John Alvin B. SerenioPrincess CutabBelum ada peringkat
- Manual For Continuous Distillation: 1. Week 1Dokumen21 halamanManual For Continuous Distillation: 1. Week 1Richard ObinnaBelum ada peringkat
- Oil & Gas Separation Book 2 PDFDokumen47 halamanOil & Gas Separation Book 2 PDFMahathir Che Ap100% (4)
- Control SystemDokumen179 halamanControl Systemgurudatha26583% (6)
- Electrical Engineering Technology: Cambrian CollegeDokumen12 halamanElectrical Engineering Technology: Cambrian CollegeGabrielGrecoBelum ada peringkat
- Power Electronics: Control : Home Assignment A1: Speed Control With DC MachineDokumen7 halamanPower Electronics: Control : Home Assignment A1: Speed Control With DC MachinebmmostefaBelum ada peringkat
- Exp3 - Air Pressure ControlDokumen8 halamanExp3 - Air Pressure ControlDon LawrenceBelum ada peringkat
- Home Assignment DC Motor Control1Dokumen7 halamanHome Assignment DC Motor Control1jegjegtBelum ada peringkat
- Closed-Loop System and Closed-Loop Control SystemsDokumen9 halamanClosed-Loop System and Closed-Loop Control SystemsfwefBelum ada peringkat
- Ece IV Control Systems (10es43) Notes1Dokumen205 halamanEce IV Control Systems (10es43) Notes1Nithindev GuttikondaBelum ada peringkat
- Lab ReportDokumen13 halamanLab ReportHemal MenukaBelum ada peringkat
- Unit-1 NotesDokumen43 halamanUnit-1 NotesMD SHAHRIARMAHMUDBelum ada peringkat
- 2.004 Dynamics and Control Ii: Mit OpencoursewareDokumen7 halaman2.004 Dynamics and Control Ii: Mit OpencoursewareVishay RainaBelum ada peringkat
- Pid EeeeDokumen28 halamanPid Eeeecyprian obotaBelum ada peringkat
- Control Theory MaterialDokumen18 halamanControl Theory MaterialalwaysharshBelum ada peringkat
- Control Lab PDFDokumen76 halamanControl Lab PDFMohamed BenrahalBelum ada peringkat
- Open Loop Control System Trainer: Hitech Instruction ManualDokumen4 halamanOpen Loop Control System Trainer: Hitech Instruction ManualnileshsawBelum ada peringkat
- Control Systems Unit I NotesDokumen55 halamanControl Systems Unit I NotesShabbir AliBelum ada peringkat
- Water LevellingDokumen4 halamanWater Levellingshresth.gupta.ug22Belum ada peringkat
- Things To Think About Ch.13 (Process Control A)Dokumen21 halamanThings To Think About Ch.13 (Process Control A)Salsa NisaBelum ada peringkat
- Pressure Control ReportDokumen16 halamanPressure Control ReportAngel Mah Xin YeeBelum ada peringkat
- Control SystemDokumen183 halamanControl Systemsantoshgowda8Belum ada peringkat
- Liquid Level Control System V2Dokumen14 halamanLiquid Level Control System V2Shisanu SenBelum ada peringkat
- Lab Manual Control Systems (EEE325) : 2 Edition August 2011Dokumen7 halamanLab Manual Control Systems (EEE325) : 2 Edition August 2011Yasir HussainBelum ada peringkat
- LAB No. 6 Level Control of Liquid: Name: Abid Kamal Reg No: 3798Dokumen6 halamanLAB No. 6 Level Control of Liquid: Name: Abid Kamal Reg No: 3798Sanjar BeyBelum ada peringkat
- Control Lab Project ReportDokumen28 halamanControl Lab Project ReportDanyal QamarBelum ada peringkat
- Control SystemsDokumen20 halamanControl SystemsRajesh Kumar100% (1)
- Mesb333 Pid ControlDokumen13 halamanMesb333 Pid ControlMohd KhairiBelum ada peringkat
- Industrial RO Control Device - ROC-2313Dokumen10 halamanIndustrial RO Control Device - ROC-2313AmiBelum ada peringkat
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGDari EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGBelum ada peringkat
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsDari EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsBelum ada peringkat
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDari EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorBelum ada peringkat
- Introduction to the simulation of power plants for EBSILON®Professional Version 15Dari EverandIntroduction to the simulation of power plants for EBSILON®Professional Version 15Belum ada peringkat
- 3241 Lecture 8Dokumen45 halaman3241 Lecture 8Jamal AlshaweshBelum ada peringkat
- Waste MGTDokumen7 halamanWaste MGTYamini JayabalanBelum ada peringkat
- Pushing The Envelope: A NASA GUIDE TO ENGINESDokumen114 halamanPushing The Envelope: A NASA GUIDE TO ENGINEScjnjr1Belum ada peringkat
- Vehicle AerodynamicsDokumen31 halamanVehicle AerodynamicsNimisha Singh100% (1)
- 26396Dokumen39 halaman26396Jamal AlshaweshBelum ada peringkat
- Centre Type State City Address Operating Hours Postal Code Tel#Dokumen1 halamanCentre Type State City Address Operating Hours Postal Code Tel#Jamal AlshaweshBelum ada peringkat
- New Rules 2013Dokumen40 halamanNew Rules 2013Jamal AlshaweshBelum ada peringkat
- 169 180 1 PBDokumen6 halaman169 180 1 PBJamal AlshaweshBelum ada peringkat
- Introduction and Theory Recapitulation PDFDokumen5 halamanIntroduction and Theory Recapitulation PDFJamal AlshaweshBelum ada peringkat
- 14 Thevening With Dependent SourcesDokumen2 halaman14 Thevening With Dependent SourcesJamal AlshaweshBelum ada peringkat
- Thevenin and Nortan Equivalent Tutorial PDFDokumen13 halamanThevenin and Nortan Equivalent Tutorial PDF12karsBelum ada peringkat
- Computational Fluid Dynamics 001Dokumen107 halamanComputational Fluid Dynamics 001Jamal AlshaweshBelum ada peringkat
- Yaw Damper Installation GuideDokumen12 halamanYaw Damper Installation GuideJamal AlshaweshBelum ada peringkat
- 3241 Lecture 8Dokumen45 halaman3241 Lecture 8Jamal AlshaweshBelum ada peringkat
- Basic Autopilot SystemsDokumen4 halamanBasic Autopilot SystemsSonali Srivastava100% (1)
- MIT18 336S09 Lec18Dokumen3 halamanMIT18 336S09 Lec18Jamal AlshaweshBelum ada peringkat
- Climb PerformanceDokumen73 halamanClimb PerformanceAbdul Razak Ibnu UmarBelum ada peringkat
- Chapter 4 FuselageDokumen29 halamanChapter 4 FuselageSaumay ErazoBelum ada peringkat
- Stability Augmentation SystemsDokumen4 halamanStability Augmentation SystemsSuraj ChaurasiyaBelum ada peringkat
- Battle Space SimulationDokumen22 halamanBattle Space SimulationJamal AlshaweshBelum ada peringkat
- MIT18 336S09 Lec2Dokumen4 halamanMIT18 336S09 Lec2Jamal AlshaweshBelum ada peringkat
- MIT18 336S09 Lec13Dokumen5 halamanMIT18 336S09 Lec13Jamal AlshaweshBelum ada peringkat
- Finite Difference (FD) Approximation: Image by Mit OpencoursewareDokumen7 halamanFinite Difference (FD) Approximation: Image by Mit OpencoursewareJamal AlshaweshBelum ada peringkat
- Solidworks Tutorial 07nov06Dokumen13 halamanSolidworks Tutorial 07nov06Robin SanjayaBelum ada peringkat
- Ejercicios Solidworks PDFDokumen50 halamanEjercicios Solidworks PDFRic Frs80% (5)
- 18.336 Numerical Methods For Partial Differential Equations Fundamental ConceptsDokumen3 halaman18.336 Numerical Methods For Partial Differential Equations Fundamental ConceptsJamal AlshaweshBelum ada peringkat
- Coicine RecipesDokumen10 halamanCoicine RecipesmivergasBelum ada peringkat
- Ejercicios Solidworks PDFDokumen50 halamanEjercicios Solidworks PDFRic Frs80% (5)
- Composite Curve Tutorial: Beginner'S Guide To Solidworks BooksDokumen8 halamanComposite Curve Tutorial: Beginner'S Guide To Solidworks Bookssun5555Belum ada peringkat
- Encephalopathies: Zerlyn T. Leonardo, M.D., FPCP, FPNADokumen50 halamanEncephalopathies: Zerlyn T. Leonardo, M.D., FPCP, FPNAJanellee DarucaBelum ada peringkat
- Annual Report 2022 2Dokumen48 halamanAnnual Report 2022 2Dejan ReljinBelum ada peringkat
- Introduction To Cobit Framework - Week 3Dokumen75 halamanIntroduction To Cobit Framework - Week 3Teddy HaryadiBelum ada peringkat
- 11 - Chapter 3Dokumen27 halaman11 - Chapter 3sam000678Belum ada peringkat
- ICSE Class 10 Chemistry Sample Mock Paper Term 2 Exam 2021 22Dokumen5 halamanICSE Class 10 Chemistry Sample Mock Paper Term 2 Exam 2021 22dhruv sharmaBelum ada peringkat
- PTD30600301 4202 PDFDokumen3 halamanPTD30600301 4202 PDFwoulkanBelum ada peringkat
- Procedure Manual - IMS: Locomotive Workshop, Northern Railway, LucknowDokumen8 halamanProcedure Manual - IMS: Locomotive Workshop, Northern Railway, LucknowMarjorie Dulay Dumol80% (5)
- JSSC JDLCCE 2021 (Civil Engineering) Official Pape 230615 233342Dokumen39 halamanJSSC JDLCCE 2021 (Civil Engineering) Official Pape 230615 233342Bhuban KumbhakarBelum ada peringkat
- Super Gene 1201-1300Dokumen426 halamanSuper Gene 1201-1300Henri AtanganaBelum ada peringkat
- JurnalDokumen12 halamanJurnalSandy Ronny PurbaBelum ada peringkat
- Manual ML 1675 PDFDokumen70 halamanManual ML 1675 PDFSergio de BedoutBelum ada peringkat
- Leonard Nadler' ModelDokumen3 halamanLeonard Nadler' ModelPiet Gabz67% (3)
- LANY Lyrics: "Thru These Tears" LyricsDokumen2 halamanLANY Lyrics: "Thru These Tears" LyricsAnneBelum ada peringkat
- Addpac AP1000 DSDokumen2 halamanAddpac AP1000 DSEnrique RamosBelum ada peringkat
- 1941 Iraq and The IlluminatiDokumen4 halaman1941 Iraq and The IlluminatiZaneWeltonBelum ada peringkat
- P&CDokumen18 halamanP&Cmailrgn2176Belum ada peringkat
- LUNG ARTIFACTSreviewDokumen13 halamanLUNG ARTIFACTSreviewMayra ValderramaBelum ada peringkat
- ENGL102 Othello Act 3 Discussion QuestionsDokumen2 halamanENGL102 Othello Act 3 Discussion QuestionsDaniel DenningBelum ada peringkat
- Industrial RevolutionDokumen2 halamanIndustrial RevolutionDiana MariaBelum ada peringkat
- Kübra Şendoğan CVDokumen5 halamanKübra Şendoğan CVKübra ŞendoğanBelum ada peringkat
- Mineral Resource Classification - It's Time To Shoot The Spotted Dog'!Dokumen6 halamanMineral Resource Classification - It's Time To Shoot The Spotted Dog'!Hassan Dotsh100% (1)
- EN 213 Vertintojui WWWDokumen2 halamanEN 213 Vertintojui WWWMonika PetronytėBelum ada peringkat
- Recent Advances in Dielectric-Resonator Antenna TechnologyDokumen14 halamanRecent Advances in Dielectric-Resonator Antenna Technologymarceloassilva7992Belum ada peringkat
- Saeed Sentence Relation and Truth (Summary)Dokumen11 halamanSaeed Sentence Relation and Truth (Summary)Mohammad Hassan100% (1)
- GDCR - Second RevisedDokumen290 halamanGDCR - Second RevisedbhaveshbhoiBelum ada peringkat
- 1980 - William Golding - Rites of PassageDokumen161 halaman1980 - William Golding - Rites of PassageZi Knight100% (1)
- Project - Dreambox Remote Video StreamingDokumen5 halamanProject - Dreambox Remote Video StreamingIonut CristianBelum ada peringkat
- The Two Diode Bipolar Junction Transistor ModelDokumen3 halamanThe Two Diode Bipolar Junction Transistor ModelAlbertoBelum ada peringkat
- Training Structure - Thinkific Plus TemplateDokumen7 halamanTraining Structure - Thinkific Plus TemplateQIONG WUBelum ada peringkat
- Montessori Vs WaldorfDokumen4 halamanMontessori Vs WaldorfAbarnaBelum ada peringkat