Anda mungkin juga menyukai
- Electric - Propulsion Imtech DieselElSys Rev05Dokumen10 halamanElectric - Propulsion Imtech DieselElSys Rev05moiseian100% (1)
- Marine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsDari EverandMarine Rudders and Control Surfaces: Principles, Data, Design and ApplicationsPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- Marine EnginesDokumen12 halamanMarine EnginesSyukry MaulidyBelum ada peringkat
- Marine Propulsion SystemsDokumen5 halamanMarine Propulsion SystemsIbrahim SameirBelum ada peringkat
- Naval Mechanical Engineering: Gas Turbine Propulsion, Auxiliary, and Engineering Support SystemsDari EverandNaval Mechanical Engineering: Gas Turbine Propulsion, Auxiliary, and Engineering Support SystemsBelum ada peringkat
- Combined Marine Propulsion PDFDokumen10 halamanCombined Marine Propulsion PDFSea Man Mkt100% (1)
- Marine and Offshore Pumping and Piping SystemsDari EverandMarine and Offshore Pumping and Piping SystemsPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Hybrid Electric Propulsion SystemsDokumen6 halamanHybrid Electric Propulsion Systemsy_durBelum ada peringkat
- Basic Principles of Ship Propulsion: ContentsDokumen28 halamanBasic Principles of Ship Propulsion: Contentserhandtm96% (26)
- Marine Propulsion PlantDokumen26 halamanMarine Propulsion PlantAbdul Naim Lee100% (1)
- Steering System and Main Propulsion ArrangementDokumen26 halamanSteering System and Main Propulsion ArrangementveramondBelum ada peringkat
- Wartsila CPP PaperDokumen4 halamanWartsila CPP Papergatheringforgardner9550Belum ada peringkat
- The Use of Electric Motors For The Propulsion of Seagoing VesselsDokumen23 halamanThe Use of Electric Motors For The Propulsion of Seagoing Vesselspal_malayBelum ada peringkat
- ASD Tug Specification - PTBDokumen29 halamanASD Tug Specification - PTBNasrulSyahruddinBelum ada peringkat
- Marine Propulsion SystemDokumen114 halamanMarine Propulsion SystemWajih100% (3)
- Steering GearDokumen34 halamanSteering GearBenedictus Kenny100% (2)
- Shipyard VisitDokumen16 halamanShipyard VisitJagadeep TcBelum ada peringkat
- Propellers and Shafting: G RedpathDokumen26 halamanPropellers and Shafting: G RedpathIsrael Romani CaceresBelum ada peringkat
- 01) MTU Hybrid Solution - Marine For Distributor - 01062017Dokumen32 halaman01) MTU Hybrid Solution - Marine For Distributor - 01062017priyoBelum ada peringkat
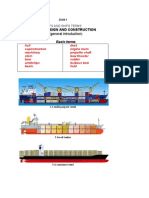
- Ship Design and ConstructionDokumen12 halamanShip Design and ConstructiongamronBelum ada peringkat
- Overview of STX Shipyard Facilities - Rev.1Dokumen25 halamanOverview of STX Shipyard Facilities - Rev.1emba2015Belum ada peringkat
- Ship MachineryDokumen43 halamanShip MachineryAkma Husna100% (3)
- Parametric Design 1Dokumen48 halamanParametric Design 1Jorge HL100% (1)
- About Shipyard LayoutDokumen135 halamanAbout Shipyard LayoutRagesh Karimbil100% (1)
- General Arrangement Plan Lecture PDFDokumen58 halamanGeneral Arrangement Plan Lecture PDFAktarojjaman Milton100% (2)
- Marine Power CatalogueDokumen98 halamanMarine Power Cataloguesafaa salamBelum ada peringkat
- Ship S Engine Effective PowerDokumen9 halamanShip S Engine Effective Powernauta0007Belum ada peringkat
- Modern Marine Engineers Manual - Vo1 1.1Dokumen330 halamanModern Marine Engineers Manual - Vo1 1.1thaclouc67% (6)
- Basic Electronic For Marine EngineersDokumen45 halamanBasic Electronic For Marine EngineersŞansal DikmenerBelum ada peringkat
- Diesel Electric PropulsionDokumen77 halamanDiesel Electric PropulsionAnuraag Diyya100% (1)
- Ship Power PlantDokumen141 halamanShip Power Plantnguyentrunghieu51dltt100% (2)
- 27th International Towing Tank Coference ITTC 2014Dokumen532 halaman27th International Towing Tank Coference ITTC 2014UffeBelum ada peringkat
- 201ymm01 Mag TugandOSV 032Dokumen118 halaman201ymm01 Mag TugandOSV 032JaadBelum ada peringkat
- Tug BoatDokumen27 halamanTug BoatRinaldy Simatupang100% (4)
- Azipod Vi Project Guide v5Dokumen36 halamanAzipod Vi Project Guide v5lujohn28Belum ada peringkat
- Griffiths Diesel EngineDokumen30 halamanGriffiths Diesel Enginesunahsuggs50% (2)
- ME-GI Dual Fuel MAN B&W EnginesDokumen24 halamanME-GI Dual Fuel MAN B&W EnginesKamal WanniarachchiBelum ada peringkat
- Propeller Design Lecture PDFDokumen75 halamanPropeller Design Lecture PDFgksahaBelum ada peringkat
- Electromagnetic Aircraft Launch SystemDokumen8 halamanElectromagnetic Aircraft Launch SystemRikhil Yalamanchi100% (1)
- 5 Propeller DesignDokumen50 halaman5 Propeller DesignAnca GeaninaBelum ada peringkat
- Energy Saving Basics - EsdsDokumen40 halamanEnergy Saving Basics - Esdsapi-238581599Belum ada peringkat
- Diesel Electric Propulsion Plant - MANDokumen26 halamanDiesel Electric Propulsion Plant - MANThomas St100% (1)
- +diesel Electric Propulsion Plants Engineering GuidelineDokumen27 halaman+diesel Electric Propulsion Plants Engineering GuidelinelesmosBelum ada peringkat
- Energy Savings of Variable Frequency DrivesDokumen31 halamanEnergy Savings of Variable Frequency DrivesAnand AgrawalBelum ada peringkat
- HEW Gesamtkatalog 2013 GB电机参数Dokumen229 halamanHEW Gesamtkatalog 2013 GB电机参数丁瑞锋Belum ada peringkat
- Hydraulic Turbines Od ThaperDokumen90 halamanHydraulic Turbines Od ThaperVeronica Naveda Espinoza100% (1)
- Variable Frequency Drives VFDDokumen30 halamanVariable Frequency Drives VFDKareem HelmyBelum ada peringkat
- 5 - Prime Movers - Electric MotorDokumen38 halaman5 - Prime Movers - Electric MotorcaingletthereseBelum ada peringkat
- 3.1 Turbine and GoverningDokumen90 halaman3.1 Turbine and GoverningYudo Heru PribadiBelum ada peringkat
- 3.1 GL For Selection of Turbine and GoverningDokumen96 halaman3.1 GL For Selection of Turbine and GoverningBehailu FelekeBelum ada peringkat
- Nema MG 11-2001 - Energy Mangement Guide For Selection and Use of Single-Phase MotorsDokumen8 halamanNema MG 11-2001 - Energy Mangement Guide For Selection and Use of Single-Phase MotorsjamescarvalhoaraujoBelum ada peringkat
- Application of VFD in Power PlantDokumen62 halamanApplication of VFD in Power PlantSakthi MuruganBelum ada peringkat
- Single-Phase Motors المحركات أحادية المراحلDokumen12 halamanSingle-Phase Motors المحركات أحادية المراحلGrundfosEgyptBelum ada peringkat
- Avoid Over-Specifying Inverter-Duty MotorsDokumen9 halamanAvoid Over-Specifying Inverter-Duty MotorsCesar HernandezBelum ada peringkat
- Shaft Generators For MC and Me EnginesDokumen48 halamanShaft Generators For MC and Me EnginesFuchsbau100% (1)
- Diesel Electric Systems For Offshore Vessels: Introduction and SummaryDokumen9 halamanDiesel Electric Systems For Offshore Vessels: Introduction and Summaryjoaofelipe.msBelum ada peringkat
- Power Electronics and EDDokumen45 halamanPower Electronics and EDtefe yabatuBelum ada peringkat
- AC Motor Controls For Elevators: An MCE Technical PublicationDokumen16 halamanAC Motor Controls For Elevators: An MCE Technical PublicationSAKDA MAPRADITKULBelum ada peringkat
- Speed Control of Induction Motor Using PI and V/F Scalar Vector ControllersDokumen9 halamanSpeed Control of Induction Motor Using PI and V/F Scalar Vector ControllersYesha ShahBelum ada peringkat
- E MS-60B FX-listDokumen13 halamanE MS-60B FX-lista_sandroBelum ada peringkat
- Infineon TLE6209R DS v03 02 enDokumen30 halamanInfineon TLE6209R DS v03 02 enRoger SegoBelum ada peringkat
- Ob2262 Ver2.0 Datasheet PDFDokumen13 halamanOb2262 Ver2.0 Datasheet PDFjesus cautivoBelum ada peringkat
- Synrod Laser Manual (CO2-G48v2.1)Dokumen64 halamanSynrod Laser Manual (CO2-G48v2.1)Amir Nazem ZadehBelum ada peringkat
- Atv31 (E)Dokumen220 halamanAtv31 (E)Santos Zosimo Ocas GoicocheaBelum ada peringkat
- 3 Axis Milling Machine PDFDokumen5 halaman3 Axis Milling Machine PDFAnuj MathurBelum ada peringkat
- Case Robotics Group Summer Internship ReportDokumen23 halamanCase Robotics Group Summer Internship ReportMirza Qutab BaigBelum ada peringkat
- User Manual: Function/Arbitrary Waveform GeneratorDokumen104 halamanUser Manual: Function/Arbitrary Waveform GeneratorАндрей АнищенкоBelum ada peringkat
- Hifonics 2006Dokumen17 halamanHifonics 2006Faizal Imam AlfarisBelum ada peringkat
- Monitor Williams KristelDokumen43 halamanMonitor Williams KristelOmar Beteta AranaBelum ada peringkat
- Emc Design FundamentalsDokumen70 halamanEmc Design FundamentalsVinod KumarBelum ada peringkat
- ZS6312 V1.0Dokumen12 halamanZS6312 V1.0Franzua PlasenciaBelum ada peringkat
- Tig 3001i SDokumen76 halamanTig 3001i ScostelchelariuBelum ada peringkat
- Using PWM Output As A Digital-To-Analog Converter On A TMS320F280x Digital Signal ControllerDokumen32 halamanUsing PWM Output As A Digital-To-Analog Converter On A TMS320F280x Digital Signal ControllerAtakan OzturKBelum ada peringkat
- TNY176PNDokumen22 halamanTNY176PNDíaz Rivero Cesar EnriqueBelum ada peringkat
- PCM and DPCMDokumen8 halamanPCM and DPCMOPTICALMIMOOFDMBelum ada peringkat
- Adic PDFDokumen25 halamanAdic PDFDejan DeksBelum ada peringkat
- ADP3293-D Prog Ic DataDokumen30 halamanADP3293-D Prog Ic DataamirBelum ada peringkat
- Eaton Frekventni SoftstarteriDokumen177 halamanEaton Frekventni SoftstarteriAlmir MurselovićBelum ada peringkat
- EM78M612 DatasheetDokumen58 halamanEM78M612 Datasheetafacean100% (1)
- DC Drive Selection Guide: KB Electronics, IncDokumen12 halamanDC Drive Selection Guide: KB Electronics, Incdang phuoc thuanBelum ada peringkat
- Mip2L30Mtscf: Product StandardsDokumen9 halamanMip2L30Mtscf: Product StandardsSIVARAMANJAGANATHANBelum ada peringkat
- Smart Sprinkler System Using Basic StampDokumen22 halamanSmart Sprinkler System Using Basic StampdiegoBelum ada peringkat
- 95-Wat Laptop PSU 12V in - 19V 5A Out PDFDokumen7 halaman95-Wat Laptop PSU 12V in - 19V 5A Out PDFRodrigo SantosBelum ada peringkat
- GRBL Settings OLM2ProS2 - 187Dokumen2 halamanGRBL Settings OLM2ProS2 - 187Om AlfiBelum ada peringkat
- ARM7 LPC2129 Processor RegistersDokumen34 halamanARM7 LPC2129 Processor RegistersAnchal ChaturvedyBelum ada peringkat
- Controls Final Final FinalDokumen48 halamanControls Final Final FinalDan BautistaBelum ada peringkat
- Application of VFD in Cycling Pumps in Thermal Power PlantDokumen10 halamanApplication of VFD in Cycling Pumps in Thermal Power PlantJose Manuel FreitasBelum ada peringkat
- 1.5Mhz, 30A High-Efficiency, Led Driver With Rapid Led Current PulsingDokumen25 halaman1.5Mhz, 30A High-Efficiency, Led Driver With Rapid Led Current PulsingDummy CekBelum ada peringkat