Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Copyright 2010 Instrumentation Reference Book Fourth EditionDokumen1 halamanCopyright 2010 Instrumentation Reference Book Fourth EditionMotasim_mBelum ada peringkat
- Chapter 26 Chemical Analysis Moisture Measurement 2010 Instrumentation Reference Book Fourth EditionDokumen8 halamanChapter 26 Chemical Analysis Moisture Measurement 2010 Instrumentation Reference Book Fourth EditionMotasim_mBelum ada peringkat
- Chapter 38 Instrument Installation and Commissioning 2010 Instrumentation Reference Book Fourth EditionDokumen6 halamanChapter 38 Instrument Installation and Commissioning 2010 Instrumentation Reference Book Fourth EditionMotasim_mBelum ada peringkat
- Chapter 35 Batch Process Control 2010 Instrumentation Reference Book Fourth EditionDokumen2 halamanChapter 35 Batch Process Control 2010 Instrumentation Reference Book Fourth EditionMotasim_mBelum ada peringkat
- Introduction 2010 Instrumentation Reference Book Fourth EditionDokumen2 halamanIntroduction 2010 Instrumentation Reference Book Fourth EditionMotasim_mBelum ada peringkat
- Chapter 34 Advanced Control For The Plant Floor 2010 Instrumentation Reference Book Fourth EditionDokumen10 halamanChapter 34 Advanced Control For The Plant Floor 2010 Instrumentation Reference Book Fourth EditionMotasim_mBelum ada peringkat
- Avatar Upgrade Program PDFDokumen33 halamanAvatar Upgrade Program PDFMotasim_mBelum ada peringkat
- Programming With MatLabDokumen23 halamanProgramming With MatLabZia SilverBelum ada peringkat
- Contributors 2010 Instrumentation Reference Book Fourth EditionDokumen2 halamanContributors 2010 Instrumentation Reference Book Fourth EditionMotasim_mBelum ada peringkat
- 1001 Vocabulary and Spelling QuestionsDokumen160 halaman1001 Vocabulary and Spelling Questionssashi01092% (12)
- Prepare For IELTSDokumen169 halamanPrepare For IELTSapi-3818413100% (2)
- 1081app A 1 PDFDokumen11 halaman1081app A 1 PDFMotasim_mBelum ada peringkat
- Switches ExplainedDokumen3 halamanSwitches ExplainedMotasim_mBelum ada peringkat
- Simulation, Modeling, and Performance Analysis of IEEE 802.16e OFDMA Systems For Urban and Rural EnvironmentsDokumen4 halamanSimulation, Modeling, and Performance Analysis of IEEE 802.16e OFDMA Systems For Urban and Rural EnvironmentsMotasim_mBelum ada peringkat
- Appendix 4 Solutions To Self Test Questions 2001 Measurement and Instrumentation Principles Third EditionDokumen4 halamanAppendix 4 Solutions To Self Test Questions 2001 Measurement and Instrumentation Principles Third EditionMotasim_mBelum ada peringkat
- Acknowledgements 2001 Measurement and Instrumentation Principles Third EditionDokumen1 halamanAcknowledgements 2001 Measurement and Instrumentation Principles Third EditionMotasim_mBelum ada peringkat
- 90 Days of ActionDokumen92 halaman90 Days of ActionPaula StanwyckBelum ada peringkat
- Appendix 4 Solutions To Self Test Questions 2001 Measurement and Instrumentation Principles Third EditionDokumen4 halamanAppendix 4 Solutions To Self Test Questions 2001 Measurement and Instrumentation Principles Third EditionMotasim_mBelum ada peringkat
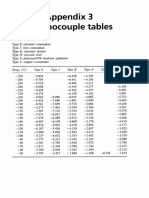
- Appendix 3 Thermocouple Tables 2001 Measurement and Instrumentation Principles Third EditionDokumen6 halamanAppendix 3 Thermocouple Tables 2001 Measurement and Instrumentation Principles Third EditionMotasim_mBelum ada peringkat
- Appendix 2 TH Venin S Theorem 2001 Measurement and Instrumentation Principles Third EditionDokumen6 halamanAppendix 2 TH Venin S Theorem 2001 Measurement and Instrumentation Principles Third EditionMotasim_mBelum ada peringkat
- Index 2001 Measurement and Instrumentation Principles Third EditionDokumen7 halamanIndex 2001 Measurement and Instrumentation Principles Third EditionMotasim_mBelum ada peringkat
- Preface 2001 Measurement and Instrumentation Principles Third EditionDokumen3 halamanPreface 2001 Measurement and Instrumentation Principles Third EditionMotasim_mBelum ada peringkat
- Hsu 4 Information and Control Systems AbDokumen43 halamanHsu 4 Information and Control Systems AbMotasim_mBelum ada peringkat
- Appendix 1 Imperial Metric SI Conversion Tables 2001 Measurement and Instrumentation Principles Third EditionDokumen7 halamanAppendix 1 Imperial Metric SI Conversion Tables 2001 Measurement and Instrumentation Principles Third EditionMotasim_mBelum ada peringkat
- Appendix 3 Thermocouple Tables 2001 Measurement and Instrumentation Principles Third EditionDokumen6 halamanAppendix 3 Thermocouple Tables 2001 Measurement and Instrumentation Principles Third EditionMotasim_mBelum ada peringkat
- Chapter 4 Simulation and Design Software1 2010 Instrumentation Reference Book Fourth EditionDokumen2 halamanChapter 4 Simulation and Design Software1 2010 Instrumentation Reference Book Fourth EditionMotasim_mBelum ada peringkat
- Chapter 5 Security For Industrial Automation1 2010 Instrumentation Reference Book Fourth EditionDokumen2 halamanChapter 5 Security For Industrial Automation1 2010 Instrumentation Reference Book Fourth EditionMotasim_mBelum ada peringkat
- Appendix C The Institute of Measurement and Control 2010 Instrumentation Reference Book Fourth EditionDokumen4 halamanAppendix C The Institute of Measurement and Control 2010 Instrumentation Reference Book Fourth EditionMotasim_mBelum ada peringkat
- Chapter 3 Measurement Methods and Control Strategies 2010 Instrumentation Reference Book Fourth EditionDokumen2 halamanChapter 3 Measurement Methods and Control Strategies 2010 Instrumentation Reference Book Fourth EditionMotasim_mBelum ada peringkat
- Appendix D International Society of Automation Formerly Instrument Society of America 2010 Instrumentation Reference Book Fourth EditionDokumen2 halamanAppendix D International Society of Automation Formerly Instrument Society of America 2010 Instrumentation Reference Book Fourth EditionMotasim_mBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- FY 65 - MathematicsDokumen12 halamanFY 65 - MathematicsAstrology StudyBelum ada peringkat
- Atkinson 2003Dokumen64 halamanAtkinson 2003Akshay29Belum ada peringkat
- DistanceMidpoint City Map ProjectDokumen12 halamanDistanceMidpoint City Map ProjectGunazdeep SidhuBelum ada peringkat
- Dataforth Elit PDFDokumen310 halamanDataforth Elit PDFDougie ChanBelum ada peringkat
- Dray Etal 2014 EcologyDokumen8 halamanDray Etal 2014 EcologySofia Julieta AcBäBelum ada peringkat
- Mroz ReplicationDokumen9 halamanMroz ReplicationMateo RiveraBelum ada peringkat
- A Neural Network Approach For Early Cost Estimation of Structural Systems of BuildingsDokumen8 halamanA Neural Network Approach For Early Cost Estimation of Structural Systems of BuildingsHai Dai GiaBelum ada peringkat
- Nike Case AnalysisDokumen9 halamanNike Case AnalysistimbulmanaluBelum ada peringkat
- Tutorial Week 10 - Internal Bone RemodellingDokumen13 halamanTutorial Week 10 - Internal Bone RemodellingHussam El'SheikhBelum ada peringkat
- WJC Write-UpDokumen6 halamanWJC Write-Upapi-272099906Belum ada peringkat
- Origin of Negative Thermal Expansion Phenomenon in Solids (2011)Dokumen4 halamanOrigin of Negative Thermal Expansion Phenomenon in Solids (2011)vls_2012Belum ada peringkat
- VHDL CodesDokumen9 halamanVHDL CodesSaneesh KarayilBelum ada peringkat
- A Miniature Cross-Coupled Wide Band Microstrip Bandpass FilterDokumen3 halamanA Miniature Cross-Coupled Wide Band Microstrip Bandpass FilterAnil Pandey100% (1)
- SmalloscillationsDokumen12 halamanSmalloscillationsrajbaxeBelum ada peringkat
- Estimation Bertinoro09 Cristiano Porciani 1Dokumen42 halamanEstimation Bertinoro09 Cristiano Porciani 1shikha singhBelum ada peringkat
- NonLinear EquationsDokumen40 halamanNonLinear EquationsAnonymous J1Plmv8Belum ada peringkat
- Imso 2013 Math - Short AnswerDokumen6 halamanImso 2013 Math - Short AnswerNova RonaldoBelum ada peringkat
- Objective Mapping and Kriging: 5.1 Contouring and Gridding ConceptsDokumen24 halamanObjective Mapping and Kriging: 5.1 Contouring and Gridding Conceptsforscribd1981Belum ada peringkat
- Individual Household Electric Power ConsumptionDokumen29 halamanIndividual Household Electric Power ConsumptionVISHAL SHARMABelum ada peringkat
- Ghana Building Code Part 5 - LoadsDokumen83 halamanGhana Building Code Part 5 - LoadsRichard NarteyBelum ada peringkat
- Instrumentation & Control HandoutDokumen95 halamanInstrumentation & Control HandoutPandimadevi SelvakumarBelum ada peringkat
- Discipulus - Decompiled Program InterfaceDokumen21 halamanDiscipulus - Decompiled Program InterfaceaadbosmaBelum ada peringkat
- Practicals OS GTU For PracticeDokumen34 halamanPracticals OS GTU For PracticeAashish JanardhananBelum ada peringkat
- Rural Poverty and Inequality in EthiopiaDokumen20 halamanRural Poverty and Inequality in EthiopiaSemalignBelum ada peringkat
- Mine System Analysis - Transportation, Transshipment and Assignment ProblemsDokumen87 halamanMine System Analysis - Transportation, Transshipment and Assignment ProblemsAli ÇakırBelum ada peringkat
- Paul Martin Postal - Three Investigations of ExtractionDokumen229 halamanPaul Martin Postal - Three Investigations of ExtractionpalingenesiaBelum ada peringkat
- B262u3p127as cq939p ExerciseDokumen3 halamanB262u3p127as cq939p Exercisenavaneethan senthilkumarBelum ada peringkat
- HSC Extension II Mathematics: Chapter 1. Miscellaneous Polynomials ProblemsDokumen8 halamanHSC Extension II Mathematics: Chapter 1. Miscellaneous Polynomials ProblemsSyed Hasan100% (1)
- Quiz 3 Hypothesis TestingDokumen7 halamanQuiz 3 Hypothesis TestingManoj MudirajBelum ada peringkat
- Exam Review - 2012Dokumen3 halamanExam Review - 2012Clement HoangBelum ada peringkat