Anda mungkin juga menyukai
- Unec 1699770296Dokumen16 halamanUnec 1699770296mahammadabbasli03Belum ada peringkat
- 10) PetzvalTheorem (2-6-13)Dokumen6 halaman10) PetzvalTheorem (2-6-13)Felipe Ademir Aleman HdezBelum ada peringkat
- Petzval Field CurvatureDokumen11 halamanPetzval Field CurvatureFrancisBelum ada peringkat
- Catadioptric NeverDokumen31 halamanCatadioptric Nevermaqsoodalam20063068Belum ada peringkat
- Dip2 Unit 10 - 2015-16 - 9Dokumen25 halamanDip2 Unit 10 - 2015-16 - 9adam1234we0% (1)
- 04 Retinal Image SizeDokumen32 halaman04 Retinal Image SizeMwanja Moses100% (1)
- 1) Describe Projection Schemes For Three-Dimensional Vision. A) It Is Common in Engineering Drawings To Provide Three Views of AnDokumen10 halaman1) Describe Projection Schemes For Three-Dimensional Vision. A) It Is Common in Engineering Drawings To Provide Three Views of AnPavan BangaramBelum ada peringkat
- Remove Ghosting EffectDokumen8 halamanRemove Ghosting EffectZHappy FeetzBelum ada peringkat
- Computer Vision Fundamental Matrix: Please, suggest a subtitle for a book with title 'Computer Vision Fundamental Matrix' within the realm of 'Computer Vision'. The suggested subtitle should not have ':'.Dari EverandComputer Vision Fundamental Matrix: Please, suggest a subtitle for a book with title 'Computer Vision Fundamental Matrix' within the realm of 'Computer Vision'. The suggested subtitle should not have ':'.Belum ada peringkat
- Recovering High Dynamic Range Radiance Maps From PhotographsDokumen10 halamanRecovering High Dynamic Range Radiance Maps From PhotographsAkshay PhadkeBelum ada peringkat
- Binocular Collimation With Lamp ProjectionDokumen41 halamanBinocular Collimation With Lamp ProjectionЕвгени ГеновBelum ada peringkat
- Retinex Method Based On Adaptive Smoothing For Illumination Invariant Face RecognitionDokumen17 halamanRetinex Method Based On Adaptive Smoothing For Illumination Invariant Face RecognitionMario DehesaBelum ada peringkat
- Recent Advances in Space-Variant Deblurring and Image StabilizationDokumen14 halamanRecent Advances in Space-Variant Deblurring and Image StabilizationKhan GiBelum ada peringkat
- 360° Video-Graphic Panorama Using Image StitchingDokumen4 halaman360° Video-Graphic Panorama Using Image StitchingIJAFRCBelum ada peringkat
- Detecting Flying Objects Using A Single Moving Camera: Artem Rozantsev, Vincent Lepetit, and Pascal Fua, Fellow, IEEEDokumen14 halamanDetecting Flying Objects Using A Single Moving Camera: Artem Rozantsev, Vincent Lepetit, and Pascal Fua, Fellow, IEEEGOMPA TRIVENI 122010319022Belum ada peringkat
- Figure 1. Spherical Aberration in A Planoconvex LensDokumen20 halamanFigure 1. Spherical Aberration in A Planoconvex LensGabyBenitezBelum ada peringkat
- Image RestorationDokumen6 halamanImage RestorationNorzaliza BidinBelum ada peringkat
- Fundamentals of StereosDokumen9 halamanFundamentals of StereosAmit BhuriaBelum ada peringkat
- !kannala Brandt CalibrationDokumen15 halaman!kannala Brandt CalibrationpchistBelum ada peringkat
- Robust Planar Target Tracking and Pose Estimation From A Single ConcavityDokumen7 halamanRobust Planar Target Tracking and Pose Estimation From A Single ConcavitydharmithBelum ada peringkat
- Analytical Modelling of Adaptive Optics Systems Role of The Influence FunctionDokumen2 halamanAnalytical Modelling of Adaptive Optics Systems Role of The Influence FunctionwinBelum ada peringkat
- 3 Camera Model Lec 2Dokumen5 halaman3 Camera Model Lec 2Kareem SamirBelum ada peringkat
- Zeiss About Lens DistortionDokumen28 halamanZeiss About Lens DistortionAdrian StannardBelum ada peringkat
- CGADokumen8 halamanCGARYZEN OPBelum ada peringkat
- SSDODokumen8 halamanSSDOjonnys7gBelum ada peringkat
- Spatio-Angular Resolution Tradeoff in Integral PhotographyDokumen10 halamanSpatio-Angular Resolution Tradeoff in Integral Photography劉永日樂Belum ada peringkat
- Drizzle: A Method For The Linear Reconstruction of Undersampled ImagesDokumen9 halamanDrizzle: A Method For The Linear Reconstruction of Undersampled ImagesJorge LeandroBelum ada peringkat
- Angular Domain Reconstruction of Dynamic 3D Fluid SurfacesDokumen8 halamanAngular Domain Reconstruction of Dynamic 3D Fluid Surfaces会爆炸的小米NoteBelum ada peringkat
- Visible Surface DetectionDokumen13 halamanVisible Surface DetectionShaurya KapoorBelum ada peringkat
- Ray TracingDokumen10 halamanRay TracingNitesh KumarBelum ada peringkat
- Overtaking Vehicle Detection Using Implicit Optical FlowDokumen6 halamanOvertaking Vehicle Detection Using Implicit Optical FlowVm AnBelum ada peringkat
- A Short Explanation of Aberration TheoryDokumen5 halamanA Short Explanation of Aberration TheoryNaresh KumarBelum ada peringkat
- Designing A Double-Gauss Lens, The Hard Way: David Shafer David Shafer Optical Design Fairfield, CT, 06824 #203-259-1431Dokumen22 halamanDesigning A Double-Gauss Lens, The Hard Way: David Shafer David Shafer Optical Design Fairfield, CT, 06824 #203-259-1431resuscitatBelum ada peringkat
- Autocalibration of An Ad Hoc Construction of Multi-Projector DisplaysDokumen8 halamanAutocalibration of An Ad Hoc Construction of Multi-Projector DisplaysIonuț AvramescuBelum ada peringkat
- Paraxial Eoe 03Dokumen12 halamanParaxial Eoe 03Arkapravo ChaudhuryBelum ada peringkat
- Digital Radiography: Ms - Laurencia PhilipoDokumen56 halamanDigital Radiography: Ms - Laurencia PhilipoKAZOBA FRANCISBelum ada peringkat
- PracticeDokumen6 halamanPracticeteleleBelum ada peringkat
- Shape From Specular Reflection and Optical FlowDokumen21 halamanShape From Specular Reflection and Optical FlowSavantBelum ada peringkat
- Calib NotesDokumen3 halamanCalib NotesphuocminhvoBelum ada peringkat
- Computer Stereo Vision: Exploring Depth Perception in Computer VisionDari EverandComputer Stereo Vision: Exploring Depth Perception in Computer VisionBelum ada peringkat
- A Distortion Camera For Ray TracingDokumen18 halamanA Distortion Camera For Ray TracingramsampathBelum ada peringkat
- Global Illumination in A NutshellDokumen37 halamanGlobal Illumination in A NutshellysusmpBelum ada peringkat
- Understanding Corneal TopographyDokumen12 halamanUnderstanding Corneal TopographyWagner de AvizBelum ada peringkat
- 3D Vision: Topic 9 Stereo Vision (I)Dokumen36 halaman3D Vision: Topic 9 Stereo Vision (I)Malik HashmatBelum ada peringkat
- Some Problems With Negative RefractionDokumen4 halamanSome Problems With Negative RefractionJohn Michael WilliamsBelum ada peringkat
- Spherical Aberration, Coma, and The Abbe Sine Condition For Physicists Who Don't Design LensesDokumen9 halamanSpherical Aberration, Coma, and The Abbe Sine Condition For Physicists Who Don't Design LensesRafael Guillermo Gonzalez AcuñaBelum ada peringkat
- InTech-Geometry Issues of Gaze EstimationDokumen23 halamanInTech-Geometry Issues of Gaze EstimationAdolfo Moreno B.Belum ada peringkat
- FlemingAnderson VisNeuro BookChapterDokumen16 halamanFlemingAnderson VisNeuro BookChapterYasmin ButtBelum ada peringkat
- The Alchemy Screen-Space Ambient Obscurance AlgorithmDokumen7 halamanThe Alchemy Screen-Space Ambient Obscurance Algorithmapi-704525294Belum ada peringkat
- Vision Modeling and Visualization 2011 BDokumen6 halamanVision Modeling and Visualization 2011 Bpulp noirBelum ada peringkat
- Mono 07 PhotogrammetryDokumen21 halamanMono 07 PhotogrammetrySpica Dim100% (1)
- The Shadowgraph Image - 02Dokumen7 halamanThe Shadowgraph Image - 02Abdullah SalemBelum ada peringkat
- The View Camera FocusDokumen4 halamanThe View Camera FocusLuis A GuevaraBelum ada peringkat
- Lens Light: in Barrel Distortion, Straight Lines Bulge Outwards at The Center, As in ADokumen7 halamanLens Light: in Barrel Distortion, Straight Lines Bulge Outwards at The Center, As in AFaseela HarshadBelum ada peringkat
- Optics LensesDokumen4 halamanOptics LensesJerry Pui Chaw MinBelum ada peringkat
- Low Resolution ImageDokumen9 halamanLow Resolution ImageVaswati BiswasBelum ada peringkat
- Panoramic Video From Unstructured Camera Arrays 2015Dokumen12 halamanPanoramic Video From Unstructured Camera Arrays 2015Kim Đình TháiBelum ada peringkat
- Scale Space and Anisotropic Diffusion: Laplacian Gradient DivergenceDokumen21 halamanScale Space and Anisotropic Diffusion: Laplacian Gradient DivergenceArkaprava BhowmikBelum ada peringkat
- 3차원 흐름 (원문)Dokumen8 halaman3차원 흐름 (원문)Yura JoBelum ada peringkat
- Pinhole Camera Model: Understanding Perspective through Computational OpticsDari EverandPinhole Camera Model: Understanding Perspective through Computational OpticsBelum ada peringkat
- Thesis Research Revision Summary FormDokumen1 halamanThesis Research Revision Summary FormRA Memije0% (1)
- Petron Corporation Company ProfileDokumen2 halamanPetron Corporation Company ProfileRA MemijeBelum ada peringkat
- 01 Equipment Design Report FormatDokumen15 halaman01 Equipment Design Report FormatRA MemijeBelum ada peringkat
- ValvesDokumen31 halamanValvesRA MemijeBelum ada peringkat
- Using Gain (Fixed KC) : DiagramDokumen19 halamanUsing Gain (Fixed KC) : DiagramRA MemijeBelum ada peringkat
- FM RS 08 15 Final Billing Form v.1Dokumen1 halamanFM RS 08 15 Final Billing Form v.1RA MemijeBelum ada peringkat
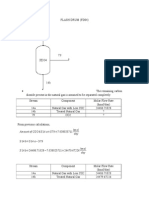
- Removed Flash Drum Mat BalDokumen2 halamanRemoved Flash Drum Mat BalRA MemijeBelum ada peringkat
- Separations Based On The Motion of Particles ThroughDokumen16 halamanSeparations Based On The Motion of Particles ThroughRA Memije0% (1)
- On LNG and FLNGDokumen46 halamanOn LNG and FLNGRA MemijeBelum ada peringkat
- Ms. Nancy Caringal Memije: 1480 Governor'S Drive Brgy - Bancal Carmona, Cavite 4116Dokumen2 halamanMs. Nancy Caringal Memije: 1480 Governor'S Drive Brgy - Bancal Carmona, Cavite 4116RA MemijeBelum ada peringkat
- Size ReductionDokumen16 halamanSize ReductionRA Memije100% (1)
- Biochemical Engineering Journal: Shangde Sun, Xiaowei ChenDokumen7 halamanBiochemical Engineering Journal: Shangde Sun, Xiaowei ChenRA MemijeBelum ada peringkat
- Lecture 6 - CrystallizationDokumen29 halamanLecture 6 - CrystallizationRA Memije33% (3)
- Drying: CHE133 Heat and Mass Transfer ApplicationsDokumen22 halamanDrying: CHE133 Heat and Mass Transfer ApplicationsRA MemijeBelum ada peringkat
- Learning Task 2 - CHE122-1Dokumen17 halamanLearning Task 2 - CHE122-1RA MemijeBelum ada peringkat
- Characterization of Solid ParticlesDokumen10 halamanCharacterization of Solid ParticlesRA MemijeBelum ada peringkat
- Fractional DistillationDokumen84 halamanFractional DistillationRA MemijeBelum ada peringkat
- 01D Basic ConceptsDokumen64 halaman01D Basic ConceptsRA MemijeBelum ada peringkat
- Forensic PhotographyDokumen18 halamanForensic PhotographyAirah Dela Rita TilapBelum ada peringkat
- Criminalistics Final CoachingDokumen109 halamanCriminalistics Final CoachingHabhibe AdiongBelum ada peringkat
- Beam ExpanderDokumen12 halamanBeam ExpanderRio Ananda PutraBelum ada peringkat
- PhotographyDokumen25 halamanPhotographyMarj BaniasBelum ada peringkat
- Criminalistics Review Questions 2Dokumen12 halamanCriminalistics Review Questions 2hukai_09100% (8)
- Photography Final ExamDokumen5 halamanPhotography Final ExamNicole Marie Tan PosadasBelum ada peringkat
- Reveiw Photo Revised QuestionsDokumen54 halamanReveiw Photo Revised Questionseleine100% (1)
- Extended Depth-Of-Field Intraocular LensesDokumen7 halamanExtended Depth-Of-Field Intraocular LensesAnh Nguyen DucBelum ada peringkat
- Syllabus PhysicsDokumen20 halamanSyllabus Physicsgdckalyandurg svgmBelum ada peringkat
- Tamron Lens Catalogue Redesign 2016 en WebDokumen36 halamanTamron Lens Catalogue Redesign 2016 en WebCameron SpencerBelum ada peringkat
- Compendium of Criminalistics Subjects-1Dokumen67 halamanCompendium of Criminalistics Subjects-1Jovie MasongsongBelum ada peringkat
- Aao Irregular AstigmatismDokumen16 halamanAao Irregular AstigmatismnurulrezqiaBelum ada peringkat
- Review Notes in Physics 2-ECEDokumen12 halamanReview Notes in Physics 2-ECEAnonymous cuVSFiBelum ada peringkat
- The Optical Quality of The CorneaDokumen32 halamanThe Optical Quality of The CorneaacalossiBelum ada peringkat
- Lens Antennas: Oscar Quevedo-Teruel KTH Royal Institute of TechnologyDokumen71 halamanLens Antennas: Oscar Quevedo-Teruel KTH Royal Institute of TechnologynetsanetBelum ada peringkat
- Americancinematographer13 1933 10Dokumen52 halamanAmericancinematographer13 1933 10Carlos de Menezes CastroBelum ada peringkat
- Microscopes and Optical Microscopy TechniquesDokumen45 halamanMicroscopes and Optical Microscopy Techniquesthomas_randBelum ada peringkat
- (H,) I 111j) D F Spherical Aberration. Spherical AberrationDokumen3 halaman(H,) I 111j) D F Spherical Aberration. Spherical AberrationGamer HelperBelum ada peringkat
- Zoom Lenses: γ of the maximum focal length to the minimum focal lengthDokumen11 halamanZoom Lenses: γ of the maximum focal length to the minimum focal lengthMansoor SultanBelum ada peringkat
- The Design of High Performance MechatronicsDokumen776 halamanThe Design of High Performance Mechatronics欧阳剑Belum ada peringkat
- Optical Aberrations in Head-Up Displays - DiazDokumen98 halamanOptical Aberrations in Head-Up Displays - DiazElke AnderssonBelum ada peringkat
- Ophthalmic Lens DesignDokumen22 halamanOphthalmic Lens DesignBernardo LeñeroBelum ada peringkat
- 2009 - SCI - Correction of Field Distortion of Laser Marking Systems Using Surface Compensation FunctionDokumen6 halaman2009 - SCI - Correction of Field Distortion of Laser Marking Systems Using Surface Compensation FunctionozguraliBelum ada peringkat
- Computer Vision - Image Formation (Camera) - 1Dokumen27 halamanComputer Vision - Image Formation (Camera) - 1Lê Thành TrungBelum ada peringkat
- Summer Criminalistic 4 ManlusokDokumen39 halamanSummer Criminalistic 4 ManlusokRhenz'c Tuazon Maturan100% (1)
- Chapters 1 & 2: - Chapter 1: PhotogrammetryDokumen40 halamanChapters 1 & 2: - Chapter 1: PhotogrammetryDelasdriana WiharjaBelum ada peringkat
- Forensic FC by Prof. Juda With Answer 3Dokumen23 halamanForensic FC by Prof. Juda With Answer 3Rodge Gerald BragaBelum ada peringkat
- Some Lens Design Methods: Dave Shafer David Shafer Optical Design Fairfield, CT 06824 #203-259-1431Dokumen92 halamanSome Lens Design Methods: Dave Shafer David Shafer Optical Design Fairfield, CT 06824 #203-259-1431sukanta chowdhuryBelum ada peringkat
- Retinoscopy: Moderator:-Dr. Jyoti PuriDokumen33 halamanRetinoscopy: Moderator:-Dr. Jyoti PuriSafa Abdualrahaman Ali HamadBelum ada peringkat
- Prepared By: CATHERINE F. REYES For iMIND Approach Review and Training Center, IncDokumen5 halamanPrepared By: CATHERINE F. REYES For iMIND Approach Review and Training Center, IncDalahican ElemSchoolBelum ada peringkat