Anda mungkin juga menyukai
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Web Development: Basic Front EndDokumen1 halamanWeb Development: Basic Front EndfinitehourabyssBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- 4g Wireless Technology (1) Electronics Seminar TopicsDokumen10 halaman4g Wireless Technology (1) Electronics Seminar TopicsfinitehourabyssBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- 4g Mobile Communication System A Seminar Report (1) Computer Science Seminar TopicsDokumen7 halaman4g Mobile Communication System A Seminar Report (1) Computer Science Seminar TopicsfinitehourabyssBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Cryonics-A Leap of Nano-TechnologyDokumen3 halamanCryonics-A Leap of Nano-TechnologyfinitehourabyssBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Portable PV SystemDokumen2 halamanPortable PV SystemdangernearBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Pedal de Distorsión de Guitarra Eléctrica: July 2015Dokumen7 halamanPedal de Distorsión de Guitarra Eléctrica: July 2015Christian MaknaBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Ofcom A Regulator S View On The Private Networks MarketDokumen17 halamanOfcom A Regulator S View On The Private Networks MarketSoniaBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Navman To Northstar Cross-Reference Guide JanuaryDokumen43 halamanNavman To Northstar Cross-Reference Guide JanuaryRobert PrisecaruBelum ada peringkat
- 6320 CA ManualDokumen96 halaman6320 CA ManualJose GarciaBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- ctv100 SBDokumen27 halamanctv100 SBistvan5555Belum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Computer System UnitDokumen18 halamanThe Computer System UnitJohn Alfredo Koykoy VicioBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- NGTB75N60FL2WG Igbt: 75 A, 600 V V 1.70 V E 1.0 MJDokumen11 halamanNGTB75N60FL2WG Igbt: 75 A, 600 V V 1.70 V E 1.0 MJJorge Eduardo Oyuela AcostaBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Micom C964C / C964 Modular Remote Terminal Unit - Rtu: Ieds GatewayDokumen2 halamanMicom C964C / C964 Modular Remote Terminal Unit - Rtu: Ieds GatewayTomuta StefanBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- How To Test A Motherboard Thru Their VRMS: Voltage Regulator Modules (VRMS)Dokumen6 halamanHow To Test A Motherboard Thru Their VRMS: Voltage Regulator Modules (VRMS)dtoxidBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
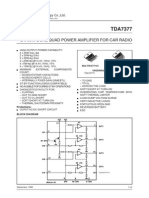
- 2 X 3 W Dual/Quad Power Amplifier For Car Radio: ProtectionsDokumen10 halaman2 X 3 W Dual/Quad Power Amplifier For Car Radio: ProtectionsJosé VidalBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Alepo Introduces OMA DM Server For Mobile Device ManagementDokumen2 halamanAlepo Introduces OMA DM Server For Mobile Device ManagementAlepoBelum ada peringkat
- Manual Elipz Rev MDokumen4 halamanManual Elipz Rev MoyoveraBelum ada peringkat
- TAINET T-288ND/T-288NE Network Series ModemDokumen85 halamanTAINET T-288ND/T-288NE Network Series ModemWest CharleBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Waterproof JSN-SR04T Ultrasonic Distance Sensor With Arduino TutorialDokumen33 halamanWaterproof JSN-SR04T Ultrasonic Distance Sensor With Arduino TutorialPreethi ShinyBelum ada peringkat
- P632 OrderForm - v25 - 042016Dokumen223 halamanP632 OrderForm - v25 - 042016Eng-Abdallh GremanBelum ada peringkat
- UniMAT Servo Set ManualDokumen84 halamanUniMAT Servo Set ManualGilberto Figueroa100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Lab #1 - Scalar MeasurementsDokumen2 halamanLab #1 - Scalar MeasurementsArchit BaglaBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Reliance Jio and GTL Infra Sign Tower Infrastructure Sharing Deal (Company Update)Dokumen3 halamanReliance Jio and GTL Infra Sign Tower Infrastructure Sharing Deal (Company Update)Shyam SunderBelum ada peringkat
- NV Jetson Agx Xavier Developer Kit User GuideDokumen23 halamanNV Jetson Agx Xavier Developer Kit User GuideLuboš ŘehounekBelum ada peringkat
- Itrainonline MMTK Access Point Configuration HandoutDokumen11 halamanItrainonline MMTK Access Point Configuration HandoutSantosh KhadkaBelum ada peringkat
- Acer Aspire 3810T/3810TZ/3410 Series Quick GuideDokumen11 halamanAcer Aspire 3810T/3810TZ/3410 Series Quick GuidevbhardBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Switching DevicesDokumen14 halamanSwitching Devicesleonardo_arévalo_28Belum ada peringkat
- Modul 5 Siskom2 MPSK ALYDokumen50 halamanModul 5 Siskom2 MPSK ALYFirmansyah KobongsatuBelum ada peringkat
- CHC X91 PDFDokumen4 halamanCHC X91 PDFCosmas MusondaBelum ada peringkat
- AES Grounding PaperDokumen13 halamanAES Grounding PaperBeranga2Belum ada peringkat
- Yamaha RX-V470Dokumen27 halamanYamaha RX-V470Andreas DerksenBelum ada peringkat
- MIC IP Starlight 700 Special enUS 23996947211Dokumen5 halamanMIC IP Starlight 700 Special enUS 23996947211AbhayaSimhaBelum ada peringkat
- Codigo de Cronometro VHDLDokumen2 halamanCodigo de Cronometro VHDLEstick Mauricio Palomino PuertoBelum ada peringkat
- AMEEncoding Error LogDokumen3 halamanAMEEncoding Error LogIhsan AsBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)