Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Astrology Bunda His HNDokumen19 halamanAstrology Bunda His HNrwshifletBelum ada peringkat
- Manuscripts of Astrological Image MagicDokumen23 halamanManuscripts of Astrological Image MagicrwshifletBelum ada peringkat
- SCT Thesis Dissertation Policies and Procedures ADokumen29 halamanSCT Thesis Dissertation Policies and Procedures ArwshifletBelum ada peringkat
- C I Is Chicago Diss 2011Dokumen18 halamanC I Is Chicago Diss 2011rwshifletBelum ada peringkat
- Request For Approval of Thesis-Dissertation CommitDokumen1 halamanRequest For Approval of Thesis-Dissertation CommitrwshifletBelum ada peringkat
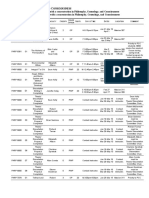
- PCC Spring Class ScheduleDokumen3 halamanPCC Spring Class SchedulerwshifletBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- UntitledDokumen50 halamanUntitledapi-118172932Belum ada peringkat
- Accenture Global Pharmaceutical and Company Planning Forecasting With Oracle HyperionDokumen2 halamanAccenture Global Pharmaceutical and Company Planning Forecasting With Oracle HyperionparmitchoudhuryBelum ada peringkat
- Mechanics Guidelines 23 Div ST Fair ExhibitDokumen8 halamanMechanics Guidelines 23 Div ST Fair ExhibitMarilyn GarciaBelum ada peringkat
- Eaton Fuller FS-4205A Transmission Parts ManualDokumen18 halamanEaton Fuller FS-4205A Transmission Parts ManualJuan Diego Vergel RangelBelum ada peringkat
- Bomba - Weir - Warman Horizontal Pumps PDFDokumen8 halamanBomba - Weir - Warman Horizontal Pumps PDFWanderson Alcantara100% (1)
- CSCE 513: Computer Architecture: Quantitative Approach, 4Dokumen2 halamanCSCE 513: Computer Architecture: Quantitative Approach, 4BharatBelum ada peringkat
- Reservoir SimulationDokumen75 halamanReservoir SimulationEslem Islam100% (9)
- Thermal Plasma TechDokumen4 halamanThermal Plasma TechjohnribarBelum ada peringkat
- Final Drive Transmission Assembly - Prior To SN Dac0202754 (1) 9030Dokumen3 halamanFinal Drive Transmission Assembly - Prior To SN Dac0202754 (1) 9030Caroline RosaBelum ada peringkat
- 050-Itp For Installation of Air Intake Filter PDFDokumen17 halaman050-Itp For Installation of Air Intake Filter PDFKöksal PatanBelum ada peringkat
- Aspen Plus Model For Moving Bed Coal GasifierDokumen30 halamanAspen Plus Model For Moving Bed Coal GasifierAzharuddin_kfupm100% (2)
- ASTM 6365 - 99 - Spark TestDokumen4 halamanASTM 6365 - 99 - Spark Testjudith_ayala_10Belum ada peringkat
- Rahul Soni BiodataDokumen2 halamanRahul Soni BiodataRahul SoniBelum ada peringkat
- DjikstraDokumen5 halamanDjikstramanoj1390Belum ada peringkat
- What Is A BW WorkspaceDokumen8 halamanWhat Is A BW Workspacetfaruq_Belum ada peringkat
- Miller (1982) Innovation in Conservative and Entrepreneurial Firms - Two Models of Strategic MomentumDokumen26 halamanMiller (1982) Innovation in Conservative and Entrepreneurial Firms - Two Models of Strategic Momentumsam lissen100% (1)
- How McAfee Took First Step To Master Data Management SuccessDokumen3 halamanHow McAfee Took First Step To Master Data Management SuccessFirst San Francisco PartnersBelum ada peringkat
- BC-2800 - Service Manual V1.1 PDFDokumen109 halamanBC-2800 - Service Manual V1.1 PDFMarcelo Ferreira CorgosinhoBelum ada peringkat
- HR AuditDokumen5 halamanHR AuditshanumanuranuBelum ada peringkat
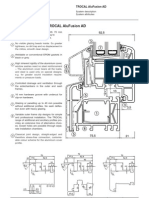
- Alufusion Eng TrocalDokumen226 halamanAlufusion Eng TrocalSid SilviuBelum ada peringkat
- Unit I Software Process and Project Management: Hindusthan College of Engineering and TechnologyDokumen1 halamanUnit I Software Process and Project Management: Hindusthan College of Engineering and TechnologyRevathimuthusamyBelum ada peringkat
- Appexchange Publishing GuideDokumen29 halamanAppexchange Publishing GuideHeatherBelum ada peringkat
- Topray Tpsm5u 185w-200wDokumen2 halamanTopray Tpsm5u 185w-200wThanh Thai LeBelum ada peringkat
- York Ylcs 725 HaDokumen52 halamanYork Ylcs 725 HaDalila Ammar100% (2)
- Practice - Creating A Discount Modifier Using QualifiersDokumen37 halamanPractice - Creating A Discount Modifier Using Qualifiersmadhu12343Belum ada peringkat
- Trafo Manual ABBDokumen104 halamanTrafo Manual ABBMarcos SebastianBelum ada peringkat
- Types and Construction of Biogas PlantDokumen36 halamanTypes and Construction of Biogas Plantadeel_jamel100% (3)
- SMILE System For 2d 3d DSMC ComputationDokumen6 halamanSMILE System For 2d 3d DSMC ComputationchanmyaBelum ada peringkat
- Regulation JigDokumen16 halamanRegulation JigMichaelZarateBelum ada peringkat
- FL Studio TutorialsDokumen8 halamanFL Studio TutorialsRoberto DFBelum ada peringkat