Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Vaslov - Thin-Walled Elastic BeamsDokumen507 halamanVaslov - Thin-Walled Elastic Beamsdhwiersma100% (5)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Subsea Technologies in Challenging Scenarios Sept 2010aDokumen23 halamanSubsea Technologies in Challenging Scenarios Sept 2010aIrvin AlbertoBelum ada peringkat
- Research Topic Proposals For The 33rd - Cycle - 2017!07!18Dokumen4 halamanResearch Topic Proposals For The 33rd - Cycle - 2017!07!18Irvin AlbertoBelum ada peringkat
- Johnson Wehrly JASA78Dokumen5 halamanJohnson Wehrly JASA78Irvin AlbertoBelum ada peringkat
- Torsión de Saint-VenantDokumen1 halamanTorsión de Saint-VenantChristian Daniel TranceVoyagerBelum ada peringkat
- Introduction To Unbounded Flexible PipeDokumen91 halamanIntroduction To Unbounded Flexible PipeIrvin AlbertoBelum ada peringkat
- Poisson BivariateDokumen17 halamanPoisson BivariateIrvin AlbertoBelum ada peringkat
- EvolutionandDesignChallengesforFlexibles ForIssueDokumen0 halamanEvolutionandDesignChallengesforFlexibles ForIssueIrvin AlbertoBelum ada peringkat
- Introduction To Unbounded Flexible PipeDokumen91 halamanIntroduction To Unbounded Flexible PipeIrvin AlbertoBelum ada peringkat
- Chapter 20 Structural Reliability TheoryDokumen16 halamanChapter 20 Structural Reliability Theoryjape162088Belum ada peringkat
- Technip Drilling BrochureDokumen12 halamanTechnip Drilling Brochurenedumaran.sBelum ada peringkat
- Wamit Theory ManualDokumen66 halamanWamit Theory Manualspsingh72Belum ada peringkat
- Bracket Tutorial UpdateDokumen18 halamanBracket Tutorial UpdateIrvin AlbertoBelum ada peringkat
- Energies: Preliminary Design of A Multi-Column TLP Foundation For A 5-MW Offshore Wind TurbineDokumen18 halamanEnergies: Preliminary Design of A Multi-Column TLP Foundation For A 5-MW Offshore Wind TurbineIrvin AlbertoBelum ada peringkat
- Computers and Geotechnics: Sari W. Abusharar, Jun-Jie Zheng, Bao-Guo ChenDokumen10 halamanComputers and Geotechnics: Sari W. Abusharar, Jun-Jie Zheng, Bao-Guo ChenIrvin AlbertoBelum ada peringkat
- International School of Management and TechnologyDokumen6 halamanInternational School of Management and TechnologyPàwáñ PàwáñBelum ada peringkat
- Vector Differentiation: 1.1 Limits of Vector Valued FunctionsDokumen19 halamanVector Differentiation: 1.1 Limits of Vector Valued FunctionsMuhammad SaniBelum ada peringkat
- January 2015 (R) MS - Paper 3H Edexcel Maths (A) IGCSEDokumen20 halamanJanuary 2015 (R) MS - Paper 3H Edexcel Maths (A) IGCSEpanya prachachitBelum ada peringkat
- FEEDLAB 02 - System ModelsDokumen8 halamanFEEDLAB 02 - System ModelsAnonymous DHJ8C3oBelum ada peringkat
- Ruler Folding Problem PaperDokumen11 halamanRuler Folding Problem PaperVishnuprakash PuthiyakovilakathBelum ada peringkat
- Ejercicios para AutocadDokumen25 halamanEjercicios para AutocadBrayan Leonel ParisacaBelum ada peringkat
- Ch8 - More About Equations - EX8BDokumen4 halamanCh8 - More About Equations - EX8BWayne TsoiBelum ada peringkat
- Publication 10 1149 6154Dokumen4 halamanPublication 10 1149 6154shanidogar60Belum ada peringkat
- AC Lesson LectureDokumen56 halamanAC Lesson LectureMKBelum ada peringkat
- Nama: Asnur Saputra NIM: F1A220034 Kelas: B Prodi: S1 StatistikaDokumen7 halamanNama: Asnur Saputra NIM: F1A220034 Kelas: B Prodi: S1 StatistikaAsnur SaputraBelum ada peringkat
- G Power ManualDokumen78 halamanG Power ManualLavinia Stupariu100% (1)
- Final Note Arithmetic VtuDokumen30 halamanFinal Note Arithmetic VtuadddataBelum ada peringkat
- Levin Chapter 1Dokumen4 halamanLevin Chapter 1Vibhav MathurBelum ada peringkat
- Algebra SolutionsDokumen447 halamanAlgebra SolutionsAref DahabrahBelum ada peringkat
- Foundation Tier: London Examinations IGCSEDokumen24 halamanFoundation Tier: London Examinations IGCSEolivia_ballet0% (1)
- Foundation Unit 13 Topic TestDokumen22 halamanFoundation Unit 13 Topic Testeuh001Belum ada peringkat
- XI Important Questions - Rev-1 (1) SRTDokumen3 halamanXI Important Questions - Rev-1 (1) SRTshidoBelum ada peringkat
- Test Bank Questions Chapter 6Dokumen3 halamanTest Bank Questions Chapter 6Anonymous 8ooQmMoNs1Belum ada peringkat
- 72 Composite ShapesDokumen8 halaman72 Composite ShapesAntwayne Youcantstopmaprogress HardieBelum ada peringkat
- Chung Tai 2020 M2 EngDokumen43 halamanChung Tai 2020 M2 Eng沈傲楠Belum ada peringkat
- Justin Manango Wazute MungangaDokumen2 halamanJustin Manango Wazute Mungangaapi-251650575Belum ada peringkat
- List of Formulas For Mathematics CFS IIUMDokumen2 halamanList of Formulas For Mathematics CFS IIUMAmin HashimBelum ada peringkat
- Square Roots: Problem 1 of 6Dokumen6 halamanSquare Roots: Problem 1 of 6Nilam DoctorBelum ada peringkat
- Dae Assignment Name: Aishwarya Mishra Enrollment No.:JL18RM003Dokumen6 halamanDae Assignment Name: Aishwarya Mishra Enrollment No.:JL18RM003aishwarya mishraBelum ada peringkat
- Conservative Vector FieldDokumen17 halamanConservative Vector Fielddurga03Belum ada peringkat
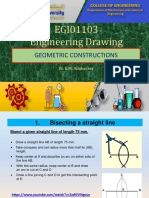
- 3 Geometric ConstructionsDokumen12 halaman3 Geometric ConstructionsRashid AlmaktoumiBelum ada peringkat
- Mathematics 07L Integral Calculus Differential EquationsDokumen1 halamanMathematics 07L Integral Calculus Differential Equationsjake luis matthewBelum ada peringkat
- Computer Science 3A - CSC3A10/CSC03A3: Lecture 2: Arrays, Linked Lists and RecursionDokumen66 halamanComputer Science 3A - CSC3A10/CSC03A3: Lecture 2: Arrays, Linked Lists and Recursionthapelo mokoloBelum ada peringkat
- Taller de Vectores 2-19Dokumen4 halamanTaller de Vectores 2-19Miguel Angel Valencia TorresBelum ada peringkat