Universidad de Orient1 Vibraciones
Diunggah oleh
José FebresHak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Universidad de Orient1 Vibraciones
Diunggah oleh
José FebresHak Cipta:
Format Tersedia
UNIVERSIDAD DE ORIENTE
NCLEO DE ANZOTEGUI
ESCUELA DE INGENIERA Y CIENCIAS APLICADAS
DEPARTAMENTO DE MECNICA
LABORATORIO IV
PRACTICA N 1
VIBRACIN TORSIONAL CON AMORTIGUAMIENTO VISCOSO
Realizado por:
FEBRES, JOSE CI 23.534.007
MARCANO, JUAN CI 19.499.929
Para:
PROF. CARLOS GOMES
PUERTO LA CRUZ, ESTADO ANZOATEGUI, MAYO 2014
RESUMEN
En la siguiente prctica se realiz con el propsito de determinar el coeficiente de
amortiguamiento viscoso y la relacin que presento con la superficie viscosa con la cual
entro en contacto. Esto se logr implementando un mtodo basado en un sistema torsional,
con amortiguamiento viscoso de un solo grado de libertad; la cual primero ensayamos sin
poner en contacto la superficie, para determinar la frecuencia natural del sistema, la cual
nos facilita el clculo del momento natural de inercia con respecto al eje que pasa por el
centro del eje de rotacin del conjunto rueda-cono (jo). Luego procedimos a la inmersin
del cono en el fluido amortiguador y as pudimos observar mediante un papel milimetrado
que se coloc en la parte superior del cono, el movimiento del sistema. Finalizado el
experimento, ya listo con las grficas se puede determinar el decrecimiento exponencial de
las distintas oscilaciones, pudindose determinar la variacin de la constante de
amortiguacin, del decremento logartmico y la relacin de amortiguacin con relacin de
estos.
NDICE
I. INTRODUCCIN.... 4
II. OBJETIVO...... 5
III. MARCO TERICO... 6
IV. INSTRUMENTOS Y MATERIALES..... 9
V. PROCEDIMIENTO EXPERIMENTAL.... 10
VI. RESULTADOS.. 11
VII. ANLISIS DE RESULTADOS... 16
VIII.CONCLUSIONES... 18
IX. REFERENCIAS.... 19
X. APNDICE. 20
10.1 Apndice A: Muestra de Clculos............... 20
10.2 Anexos. 24
I. INTRODUCCION
En la historia de la humanidad, son muchos los personajes que han aportado sobre la
ciencia de la vibracin, uno de los que defini un poco este fenmeno fue Galileo encontr
la relacin existente entre la longitud de cuerda de un pendido y su frecuencia de
oscilacin, adems encontr la relacin entre la tensin, longitud y frecuencia de vibracin
de las cuerdas, Estos estudios y otros posteriores ya indicaban la relacin que existe entre el
sonido y las vibraciones mecnicas.
Una vibracin mecnica es el movimiento de una partcula o de un cuerpo que oscila
alrededor de una posicin de equilibrio. Los cuerpos que se mueven con velocidad
moderada a travs de un fluido, encuentran un amortiguamiento viscoso. El
amortiguamiento est asociado con la disipacin de energa.
La razn principal para analizar y diagnosticar el estado de una maquina es determinar las
medidas necesarias para corregir la condicin de vibracin torsional, y as reducir el nivel
de las fuerzas no deseadas y no necesarias. De manera que, al estudiar este fenmeno, el
inters principal deber ser la identificacin de las amplitudes predominantes de la
vibracin y la determinacin de las causas. Es importante cuidar que esas fuerzas no
ocurren cerca de las frecuencias de resonancias torsionales, o los niveles de vibracin
pueden ser muy altos.
En la mayora de las mquinas y de las estructuras las vibraciones son indeseables porque
aumentan los esfuerzos mecnicos y las prdidas de energa que los acompaan. Por
consiguiente deben eliminarse lo mximo que sea posible mediante diseos apropiados. En
los ltimos aos se ha hecho mucho ms importante el anlisis de las vibraciones, debido a
la tendencia actual de construir
Generalmente se presenta una vibracin mecnica cuando se separa un sistema de su
posicin de equilibrio estable. El sistema tiende a regresar a esa posicin bajo la accin de
fuerzas de recuperacin (ya sean fuerzas elsticas como en el caso de una masa suspendida
de un resorte, o fuerzas gravitacionales como en el caso de un pndulo). Pero generalmente
el sistema llega a su posicin original con cierta velocidad que ha adquirido, la cual hace
que el sistema sobrepase dicha posicin. Como el proceso puede repetirse indefinidamente,
el sistema se mantiene en movimiento hacia uno y otro lado de su posicin de equilibrio.
Casi todos los ingenieros se encuentran con el anlisis de problemas de vibracin. Al
ingeniero mecnico le interesan las vibraciones en las maquinarias, al ingeniero civil en las
estructuras y al ingeniero en electrnica de los circuitos
II. OBJETIVO
Determinar experimentalmente la constante de amortiguacin.
Determinar la relacin de amortiguacin.
El decremento logartmico para un sistema torsional libre amortiguado.
III. MARCO TEORICO
El amortiguamiento se define como la capacidad de un sistema o cuerpo para
disipar energa cintica en otro tipo de energa. Tpicamente los amortiguados disipan la
energa cintica en energa trmica y/o en energa plstica (e.g. atenuador de impactos).
El amortiguamiento es un parmetro fundamental en el campo de las vibraciones,
fundamental en el desarrollo de modelos matemticos que permiten el estudio y anlisis de
sistemas vibratorios, como lo son: estructuras metlicas, motores, maquinaria rotativa,
turbinas, automviles, etc. Esto va encaminado a la teora de que todo sistema vibratorio
(regularmente sistemas mecnicos) tiene la capacidad de disipar energa. Para el control de
vibraciones e impactos en maquinaria, se utiliza el concepto de amortiguamiento como una
tcnica para disipar energa del sistema, manipulando as la amplitud de vibracin en el
sistema y otros parmetros de estudio.
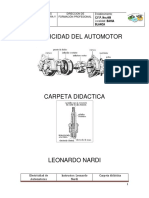
Sistemas torsionales con amortiguamiento viscoso
Los mtodos de vibraciones lineales con amortiguamiento viscoso se pueden extender
directamente a vibraciones torsionales (angulares) viscosamente amortiguadas. Para esto,
considere un sistema torsional de un grado de libertad con un amortiguador viscoso, como
se muestra en la figura 3.1(a). El par de torsin de amortiguamiento viscoso es (figura 3.1
(b)):
Figura 3.1 Amortiguador viscoso torsional
Dnde:
Donde c, es la constante de amortiguamiento torsional viscoso,
es la
velocidad angular el disco, y el signo negativo denota que el par de torsin de
amortiguamiento se opone a la direccin de la velocidad angular. La ecuacin de
movimiento se deriva como
Donde J
0
=momento de inercia de la masa del disco, K
t
= constante de resorte del
sistema (par torsin de restauracin por unidad de desplazamiento angular), y =
desplazamiento angular del disco. La solucin de la ecuacin (2.2) se determina con
exactitud como en el caso de vibracin lineal. Por ejemplo, en el caso subamortiguado, la
frecuencia de vibracin amortiguada es
Dnde:
Donde C
tc
es la constante de amortiguamiento torsional crtica.
Un mtodo prctico para determinar experimentalmente el coeficiente de amortiguacin
de un sistema consiste en iniciar su vibracin libre, obtener una representacin grfica del
movimiento vibratorio y medir la proporcin en que decrece la amplitud del movimiento.
Esta proporcin puede ser expresada, convenientemente por el decremento logartmico ,
que se define como el logaritmo natural de la razn de dos amplitudes mximas
consecutivas y
1
e y
2
en vibracin libre, o sea,
Para evaluar la amortiguacin, podemos notar que cuando el factor de la ecuacin 2.2, tiene
el valor unitario, el desplazamiento cae sobre puntos de la curva exponencial
(t)
= C.e
-wt
,
como se muestra a continuacin en la figura 1.2.
Figura 3.2 Curva mostrando los desplazamientos mximos y desplazamientos en los puntos de tangencia.
Estos puntos se acercan, pero no coinciden exactamente con los puntos mximos del
movimiento oscilatorio. Los puntos de la curva exponencial aparecen ligeramente a la
derecha de los puntos de amplitud mxima. En la prctica, en la mayora de los casos esta
discrepancia es insignificante y por lo tanto los puntos de la curva
(t)
= C.e
-wt
, pueden
aceptarse como coincidentes con los puntos de amplitud mxima. De manera que podemos
escribir, para dos desplazamientos angulares mximos consecutivos,
1
en el instante t
1
y
2
, T
D
segundos despus,
1
= C e
- t1
y
2
= C e
- (t1 + TD)
Dividiendo estas dos amplitudes mximas y tomando logaritmos naturales, obtenemos
O sustituyendo T
D
, el perodo con amortiguacin:
Como se puede ver, la razn de amortiguacin puede ser calculada a partir de la
ecuacin 2.8 despus de haber determinado experimentalmente dos amplitudes mximas
del movimiento vibratorio del sistema. Para valores pequeos de la razn de amortiguacin
sta ecuacin puede ser aproximada a:
IV. INSTRUMENTOS Y MATERIALES
Materiales:
Cronmetro.
Cinta mtrica.
Llaves de ajustes.
Papel milimetrado.
Marcador.
Vernier.
Sustancias:
Aceite
V. PROCEDIMIENTO EXPERIMENTAL
1. Medir el dimetro y longitud de la varilla 3 veces para obtener un promedio de ellas.
2. Colocar el papel milimetrado en el tambor donde graficar el marcador.
3. Medir el periodo de oscilacin del sistema al aire tranquilo (sin amortiguamiento).
4. Se lleva el marcador hasta el punto ms alto del pistn, dejndolo caer, midiendo la
distancia que recorre hasta alcanzar el fondo y el tiempo en el que lo hace.
5. Calcular kr y Jo.
6. Se coloca el recipiente cilndrico que contiene el aceite de tal manera que este cubra
el menor de los conos sealados en la superficie cnica.
7. Se coloca un nuevo papel en el tambor.
8. Se le proporciona a la rueda cierto desplazamiento angular.
9. Se suelta el marcador para que este haga el trazo hasta que el pistn llegue al fondo
del envase.
10. Se realizan los pasos 7, 8 y 9 para cada uno de los niveles sealados en la superficie
cnica.
11. Realice la grfica c
1
vs A y c
1
vs r, donde A es el rea sumergida en el aceite y r es
el radio del cono sumergido.
12. Calcule la relacin de amortiguacin para cada caso.
VI. RESULTADOS
Graficas Obtenidas
Grafica N1 Amplitud sin amortiguacin en funcin del tiempo.
Grafica N2 Amplitud con amortiguacin (nivel 1 de aceite) en funcin del tiempo.
y = 3.1362e
-0.112x
0
0.5
1
1.5
2
2.5
3
0 5 10 15 20
A
m
p
l
i
t
u
d
(
m
m
)
Tiempo (seg)
y = 2.7417e
-0.041x
0
0.5
1
1.5
2
2.5
3
0 5 10 15 20
A
m
p
l
i
t
u
d
(
m
m
)
Tiempo (seg)
Grafica N3 Amplitud con amortiguacin (nivel 2 de aceite) en funcin del tiempo.
Grafica N4 Amplitud con amortiguacin (nivel 3 de aceite) en funcin del tiempo.
y = 3.8789e
-0.042x
0
0.5
1
1.5
2
2.5
3
3.5
4
0 5 10 15 20
A
m
p
l
i
t
u
d
(
m
m
)
Tiempo (seg)
y = 4.3358e
-0.054x
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
0 5 10 15 20
Grafica N5 Amplitud con amortiguacin (nivel 4 de aceite) en funcin del tiempo.
Grafica N6: variacin de la constante de amortiguacin en funcin del rea sumergida.
y = 3.7878e
-0.06x
0
0.5
1
1.5
2
2.5
3
3.5
4
0 5 10 15 20
A
m
p
l
i
t
u
d
(
)
m
m
Tiempo (seg)
0
2
4
6
8
10
12
14
0 2000 4000 6000 8000 10000 12000 14000 16000
C
o
n
s
t
a
n
t
e
d
e
a
m
o
r
t
i
g
u
a
c
i
o
n
Area sumergida (mm2)
Tablas obtenidas
Tab. N1: Parmetros sin amortiguacin.
Parmetros obtenidos por vibracin sin amortiguacin
J (
)
Kt ( )
T (seg)
Wn (rad/s)
Jo (
)
26,058
2398,48
1,250
5,026
101,10
Tab. N2: Parmetros a diferentes niveles de aceite.
Nivel de aceite b CCt (
)
Nivel 1
-0,041
0,00815
1016,25
Nivel2
-0,042
0,00974
1014,67
Nivel 3
-0,054
0,01071
1015,09
Nivel 4
-0,060
0,01210
1017,06
Tab. N3: Constantes de amortiguacin a diferentes niveles de aceite.
Nivel de aceite Constante de amortiguacin Ct (
)
Nivel 1
8,30
Nivel 2
9,789
Nivel 3
10,86
Nivel 4
12,07
Tab. 4: reas del cono a diferentes niveles.
Nivel rea del cono
Nivel 1
860,81
Nivel 2
3443,27
Nivel 3
7747,36
Nivel 4
13779,67
VII. ANALISIS DE RESULTADOS
Una vez culminada la prctica, se pudo apreciar experimentalmente el comportamiento del
sistema de vibracin torsional al ser sometido a un amortiguamiento viscoso observndose
as parmetros importantes de analizar.
Al observar la grfica N1 la cual es proporcionada por la vibracin libre no amortiguada
de la mquina, se puede apreciar que la amplitud que se genera decae con lentitud, esto
debido a que no hay la presencia de un agente externo (excluyendo la friccin que pueda
existir con el aire o rodamientos) que absorba o disminuya estas oscilaciones, por lo que la
vibracin del sistema solo depender de la distribucin de su masa y de la rigidez.
Sin embargo al observar el comportamiento del sistema bajo la accin de amortiguacin
viscosa se puede apreciar que la amplitud de vibracin disminuye con mayor rapidez en
comparacin con el caso anterior, esta disminucin de la amplitud se hace ms notoria a
medida que sumergimos el cono en el aceite lo cual se puede observar en las grficas N2,
N3, N4 y N5.
Por lo tanto si observamos la grfica N6 se hace evidente que el coeficiente o constante de
amortiguacin del sistema es proporcional al rea del cono sumergida en el aceite lo cual
hace referencia a lo obtenido tericamente, ya que debido a las fuerzas de rozamiento que
se producen entre el aceite y el cono se hacen ms grandes al tener este mayor superficie de
contacto expuesta y as de esta forma haciendo que el sistema deje de oscilar ms rpido ya
que las fuerzas de amortiguacin se vuelven ms grandes que las fuerzas causadas por la
elasticidad del sistema.
Jos Febres C.I.: 23.534.007
VII. ANLISIS DE RESULTADO
En las Grficas 1 se muestran el comportamiento del cono bajo una vibracin libre durante
un tiempo determinado, de igual manera se muestra en la grfica 2, 3, y 4, y 5 con la
diferencia que ahora el cono se encuentra sumergido en el fluido en diferentes niveles,
durante un tiempo determinado.
Es de gran notoriedad que en los ensayos donde el cono gira libremente, el comportamiento
de las curvas fuera ms pronunciado, con picos y desplazamientos angulares mayores a los
casos en los que se sumergi a un nivel de aceite, esto es porque ste se encarga de disipar
energa cintica que va produciendo el cono.
Y observamos que a medida que el niveles de aceite cubre ms reas del cono (sumergido
en los diferentes niveles), es decir, que se aumenta la profundidad del cono en el aceite, las
oscilaciones fueron menores, ya que una mayor profundidad significa una mayor fuerza que
impide su movimiento
La grfica 6 y tabla 3 muestra el Coeficiente de amortiguamiento en funcin del rea
sumergida donde se puede apreciar que la curva tiene un comportamiento, el cual
concuerda con la teora, ya que debemos saber que a mayor profundidad (mayor rea
sumergida) se presenta mayor resistencia, como nos indica el anillo nmero 4 que presenta
mayor coeficiente de amortiguacin que en los otros niveles, es decir, los valores son
ascendentes, siendo el 4 nivel el que presenta mayor coeficiente
Juan Marcano C.I.: V-19.499.929
VIII. CONCLUSIONES
Una vibracin completamente libre produce mayores oscilaciones
La vibracin libre no amortiguada depender de la masa y la rigidez del sistema.
En una vibracin libre la amplitud de vibracin que esta genera decaer con menor
lentitud en comparacin un sistema amortiguado.
La amplitud es exponencialmente decreciente con el tiempo
En una vibracin amortiguada viscosa la rapidez con la que decae la amplitud de
vibracin depender del rea del cono que este sumergida en una sustancia viscosa
en este caso el aceite.
La constante de amortiguacin del sistema es proporcional al rea inmersa en la
sustancia viscosa
La amortiguacin viscosa est relacionada con las fuerzas de rozamiento entre la
sustancia y la superficie expuesta a esta.
Jos Febres C.I.: 23.534.007
VIII. CONCLUSIONES
El amortiguamiento disipa la energa cintica del cuerpo.
Una vibracin completamente libre produce mayores oscilaciones.
A mayor profundidad de inmersin del cono en el aceite, el movimiento es ms
restringido. En las grficas expuestas anteriormente podemos observar este
comportamiento
A medida que un sistema tiene mayor rea sumergido en el medio viscoso de
amortiguamiento, menor ser el perodo de la onda y mayor ser su decrecimiento
exponencial en el tiempo.
Juan Marcano C.I.: V-19.499.929
IX. REFERENCIAS
Vibraciones Mecnicas.
http://prof.usb.ve/ecasanov/descargas/MC2415/Practica_1_SEP2006.pdf
Vibracin Libre. http://www.umss.edu.bo/epubs/etexts/downloads/19/cap_IV.htm
Amortiguacin Viscosa. http://azimadli.com/vibman-
spanish/amortiguacinviscosa1.htm
X. APENDICES
Apndice A
Muestra de clculos
En base al procedimiento se tiene:
Midiendo el periodo de oscilacin del sistema al aire tranquilo (sin amortiguamiento). El dimetro
de la varilla y longitud de la varilla tomando varias medidas y obteniendo un promedio de ellas. Se
tiene Kt y Jo.
Medicin de la longitud de la varilla.
De las tres medidas se tienen: (87+89+ 88) / 3 = 88 cm = 880mm
Medicin del dimetro de la varilla.
De las tres medidas se tienen: (4,90 + 4,85+ 4,65) / 3 = 4,8mm
Medicin del dimetro del tambor y de los anillos.
= 94,6 mm
anillo 1
= 25,5 mm.
anillo 2
= 50,7 mm.
anillo 3
= 76,50 mm.
anillo 4
= 102,03 mm.
Medicin de los niveles del tambor a diferentes dimetros.
h1= 17,30 mm
h2= 34,60 mm
h3= 51,90 mm
h4= 69,2 mm
Calculo de la constante de elasticidad torsional ( kt ).
Clculo del momento polar de inercia ()
Partiendo de la ecuacin de ngulo de giro.
Dnde:
T: torque
L: longitud de la varilla
G: mdulo de rigidez
Jo: momento polar de inercia
Aplicando la ley de hooke (carga torsional)
Despejndose Kt se tiene:
Quedando de la ecuacin de Angulo de giro:
El momento polar de inercia de una seccin circular es.
Considerando un mdulo de rigidez de 81.000 N/mm
2
para un acero comercial
Clculo de kt
(
Calculo de Jo y Wn por la oscilacin del sistema al aire tranquilo (sin amortiguacin)
De la grfica se obtiene que T = 1,250 seg.
Clculo del Ct por el mtodo de mnimos cuadrados para el primer anillo del tambor cnico.
De la grfica N2 se obtiene:
b = -0.041
Jo = 101, 10 N.mm/s2
Wn = 5.027 rad/s
Calculo del rea del cono (nivel 1).
R = 12,75 mm
H = 17,3 mm
[
Anexos
Fig. 1: Mquina de vibracin torsional con amortiguamiento viscoso.
Fig. 2: Cono-tambor de la mquina de vibracin.
Anda mungkin juga menyukai
- ExpovaleDokumen6 halamanExpovaleValeria LeónBelum ada peringkat
- Mecanica de Fluidos - Tipo de FluidosDokumen6 halamanMecanica de Fluidos - Tipo de FluidosÁngelLuis SalvadorBelum ada peringkat
- Material Fisica ProfundizacionDokumen16 halamanMaterial Fisica ProfundizacionJOHAN CARVAJALBelum ada peringkat
- Resumen Teoría de La RelatividadDokumen3 halamanResumen Teoría de La RelatividadclaudiaBelum ada peringkat
- Transformadores TrifasicoDokumen12 halamanTransformadores TrifasicoAbel Montenegro PeraltaBelum ada peringkat
- Informe 1 - Mediciones Electricas 1Dokumen5 halamanInforme 1 - Mediciones Electricas 1maxparionaBelum ada peringkat
- Tarea 3 - 614 - Grupo - 232 - FinalDokumen12 halamanTarea 3 - 614 - Grupo - 232 - FinalSEBASTIAN VEGA ALVAREZBelum ada peringkat
- Características de Motor Eléctrico UniversalDokumen5 halamanCaracterísticas de Motor Eléctrico UniversalJoelBelum ada peringkat
- Tarea de Resistencia de MaterialesDokumen30 halamanTarea de Resistencia de MaterialesDante Morales OsorioBelum ada peringkat
- Inercia de Una Masa PuntualDokumen3 halamanInercia de Una Masa Puntualrag83Belum ada peringkat
- Curso/Apuntes Electricidad BÁSICODokumen136 halamanCurso/Apuntes Electricidad BÁSICOMaria RaBelum ada peringkat
- Hoja Guia1 DAV2021Dokumen7 halamanHoja Guia1 DAV2021Nikol Damito Fruticas100% (1)
- 3526-FC 08-Macrocosmos SA-7Dokumen47 halaman3526-FC 08-Macrocosmos SA-7Rafael ArroyoBelum ada peringkat
- Tema de ElectroterapiaDokumen8 halamanTema de ElectroterapiaArmando Mamani ChallapaBelum ada peringkat
- Quiz de Preparación Segundo Parcial - Revisión Del IntentoDokumen10 halamanQuiz de Preparación Segundo Parcial - Revisión Del IntentopatriciaBelum ada peringkat
- Movimiento de ProyectilesDokumen2 halamanMovimiento de Proyectilesmaar pavilBelum ada peringkat
- Variables TermodinámicasDokumen6 halamanVariables TermodinámicasPilar PariBelum ada peringkat
- Ejercicios de Numeros CuanticosDokumen3 halamanEjercicios de Numeros CuanticosAna Nomberto LuperdiBelum ada peringkat
- Modelos AtómicosDokumen15 halamanModelos AtómicosCarlosBelum ada peringkat
- Analisis InstrumentalDokumen5 halamanAnalisis InstrumentalManuel Ignacio C CBelum ada peringkat
- Máquinas Eléctricas RotativasDokumen31 halamanMáquinas Eléctricas RotativasKatty Aparicio100% (1)
- LabsresumenDokumen5 halamanLabsresumenFabian Mauriciano Farfan BertinBelum ada peringkat
- Amplificador IntegradorDokumen10 halamanAmplificador Integradorgustavo juarezBelum ada peringkat
- Trabajo de Malla A Tierra de Una SEDokumen31 halamanTrabajo de Malla A Tierra de Una SELeonardo Vega Flores100% (2)
- Temario QUIMICA I O-2023Dokumen1 halamanTemario QUIMICA I O-2023Jesse SeSeBelum ada peringkat
- Fisi - Clase 3Dokumen2 halamanFisi - Clase 3CC LuisBelum ada peringkat
- Trabajo Práctico Virtual Modelos AtómicosDokumen3 halamanTrabajo Práctico Virtual Modelos AtómicosMale FerreiraBelum ada peringkat
- Construccion de AnemometroDokumen3 halamanConstruccion de AnemometroJoel Diaz PazosBelum ada peringkat
- Practicas Con TiristoresDokumen5 halamanPracticas Con TiristoresmaurijessiBelum ada peringkat
- Aproximación LinealDokumen6 halamanAproximación Linealgracielaandreani1580100% (3)