Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- 3rd Grade Number WorksheetDokumen35 halaman3rd Grade Number WorksheetNel Retana SorapacBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Metal Spiral Stairs Install ManualDokumen36 halamanMetal Spiral Stairs Install ManualPeter Jean-jacquesBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Theories of ManagementDokumen10 halamanThe Theories of ManagementThea ToñacaoBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Weep Hole Part Elevation Section: Drawn: Checked: Approved: Date: CAW 5/9/2011Dokumen1 halamanWeep Hole Part Elevation Section: Drawn: Checked: Approved: Date: CAW 5/9/2011Peter Jean-jacquesBelum ada peringkat
- Robust Control and Filtering For Time Delay Systems Automation and Control EngineeringDokumen449 halamanRobust Control and Filtering For Time Delay Systems Automation and Control Engineeringnmz3410% (1)
- Steel Sheet Piling SpecificationDokumen5 halamanSteel Sheet Piling SpecificationPeter Jean-jacquesBelum ada peringkat
- First Scientific LectureDokumen113 halamanFirst Scientific Lectureiperico68Belum ada peringkat
- Worksheet 1ADokumen2 halamanWorksheet 1AMilton Vincent LibajanBelum ada peringkat
- RICS Standard Form For Consultants AppointmentDokumen39 halamanRICS Standard Form For Consultants AppointmentPeter Jean-jacquesBelum ada peringkat
- Modelos Lineales Generalizados Con Ejemplos en RDokumen573 halamanModelos Lineales Generalizados Con Ejemplos en RJuan Manuel AntónBelum ada peringkat
- StatProb Q3 Module 16Dokumen19 halamanStatProb Q3 Module 16Kelsey Gaile MaghanoyBelum ada peringkat
- Unit 9 RevisionDokumen5 halamanUnit 9 Revisionl wanningBelum ada peringkat
- Sports Field DrainageDokumen3 halamanSports Field DrainagePeter Jean-jacquesBelum ada peringkat
- Design of Custom ElementsDokumen5 halamanDesign of Custom ElementsPeter Jean-jacquesBelum ada peringkat
- Soil PenetrometerDokumen4 halamanSoil PenetrometerPeter Jean-jacquesBelum ada peringkat
- Equipment: Method of Assessment:: Block Extraction and ExaminationDokumen2 halamanEquipment: Method of Assessment:: Block Extraction and ExaminationPeter Jean-jacquesBelum ada peringkat
- Keyboard ShortcutsDokumen2 halamanKeyboard ShortcutsUmt KcBelum ada peringkat
- Argos Usa - Cements For MasonryDokumen39 halamanArgos Usa - Cements For MasonryPeter Jean-jacques0% (1)
- Approach Slab DetailsDokumen2 halamanApproach Slab DetailsPeter Jean-jacquesBelum ada peringkat
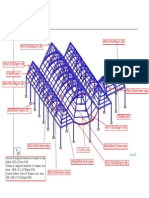
- Cathedral Roof Truss StructureDokumen1 halamanCathedral Roof Truss StructurePeter Jean-jacquesBelum ada peringkat
- f' f φ = 29° γ = 120 pcf: AssumptionsDokumen3 halamanf' f φ = 29° γ = 120 pcf: AssumptionsPeter Jean-jacquesBelum ada peringkat
- Nonuniform Negative Sampling and Log Odds Correction With Rare Events DataDokumen32 halamanNonuniform Negative Sampling and Log Odds Correction With Rare Events DataConfused SoulBelum ada peringkat
- The New Generation of Operations Research Methods in Supply Chain Optimization: A ReviewDokumen23 halamanThe New Generation of Operations Research Methods in Supply Chain Optimization: A ReviewMisty NguyễnBelum ada peringkat
- Coupled Mode TheoryDokumen5 halamanCoupled Mode TheoryRahul RoyBelum ada peringkat
- Factor Theorem and Proof - Mark SchemeDokumen6 halamanFactor Theorem and Proof - Mark SchemeAlex MoneyBelum ada peringkat
- Aqa 83002H QP Nov17 PDFDokumen32 halamanAqa 83002H QP Nov17 PDFpriyadarashani muthumalaBelum ada peringkat
- fx-991EX Quick Reference Guide PDFDokumen48 halamanfx-991EX Quick Reference Guide PDFSblBelum ada peringkat
- Virtual WorkDokumen3 halamanVirtual WorksepidehahmadyBelum ada peringkat
- Mathematics: University of Cambridge International Examinations General Certificate of Education Advanced LevelDokumen4 halamanMathematics: University of Cambridge International Examinations General Certificate of Education Advanced LevelDanielHwangBelum ada peringkat
- Measures of Central TendencyDokumen32 halamanMeasures of Central TendencyJanainah Diamla SaripadaBelum ada peringkat
- IGCSE Math Revision PlanDokumen3 halamanIGCSE Math Revision PlanBảo Đỗ DuyBelum ada peringkat
- Pre - Calculus 11 Diagnostic Test SY 2021-2022Dokumen2 halamanPre - Calculus 11 Diagnostic Test SY 2021-2022Rachelle Monn OcsioBelum ada peringkat
- CRT Aptitude PaidDokumen107 halamanCRT Aptitude PaidIndhumathi PrabuBelum ada peringkat
- 1.area of Triangles and QuadrilateralsDokumen7 halaman1.area of Triangles and QuadrilateralsVic Gabriel Nercuit GurreaBelum ada peringkat
- Candy IADokumen15 halamanCandy IAEmilie TrangBelum ada peringkat
- Coe Bsee Syl Math34Dokumen11 halamanCoe Bsee Syl Math34Darrel Damo PasaloBelum ada peringkat
- 3rd PT - Math 5.4Dokumen4 halaman3rd PT - Math 5.4Marie Fe JambaroBelum ada peringkat
- ملزمة ماث لغات للصف الأول الإعدادي - موقع ملزمتيDokumen26 halamanملزمة ماث لغات للصف الأول الإعدادي - موقع ملزمتيAhmed AliBelum ada peringkat
- Class X Math WS 9 PDFDokumen2 halamanClass X Math WS 9 PDFgoogle penBelum ada peringkat
- DLP Q2 Math5 Week2Dokumen2 halamanDLP Q2 Math5 Week2Danilo dela Rosa100% (1)
- ML PPTS MergedDokumen514 halamanML PPTS MergedPGBelum ada peringkat
- EN1201: Introductory Mathematics: University of Colombo, Sri LankaDokumen6 halamanEN1201: Introductory Mathematics: University of Colombo, Sri LankaJanaka Bandara100% (1)