Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- TCVN10304 2014 enDokumen59 halamanTCVN10304 2014 enVũ Cao Anh100% (12)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- FINNPOWER P Series Manual PDFDokumen33 halamanFINNPOWER P Series Manual PDFMaulanna Ibrohiim50% (2)
- Chap - 15Dokumen50 halamanChap - 15Arup Das100% (1)
- Operation Manual: Model: Compact THC Controller SD (Step / Dir PID Generator)Dokumen7 halamanOperation Manual: Model: Compact THC Controller SD (Step / Dir PID Generator)jaon11Belum ada peringkat
- Ref. Vertical PDFDokumen1 halamanRef. Vertical PDFjaon11Belum ada peringkat
- PlasmaOxy Operators ManualDokumen31 halamanPlasmaOxy Operators ManualRafik Mohamed AlhajiBelum ada peringkat
- Plasma - Router CNCDokumen19 halamanPlasma - Router CNCjaon11Belum ada peringkat
- Pneumatic Linear ISO Cylinder - P1A Series - Catalogue PDE2564TCUKDokumen32 halamanPneumatic Linear ISO Cylinder - P1A Series - Catalogue PDE2564TCUKjaon11Belum ada peringkat
- Artificial Muscle Actuator For Biorobotics SystemsDokumen97 halamanArtificial Muscle Actuator For Biorobotics Systemsjaon11Belum ada peringkat
- Guide roller sizes and load capacitiesDokumen1 halamanGuide roller sizes and load capacitiesjaon11Belum ada peringkat
- Arcpro Mach4 Plasma Screen User Guide: Document Revision 1.03Dokumen12 halamanArcpro Mach4 Plasma Screen User Guide: Document Revision 1.03jaon11Belum ada peringkat
- PC Carbon Manual17595 2011Dokumen117 halamanPC Carbon Manual17595 2011jaon11Belum ada peringkat
- 2013 CatalogDokumen13 halaman2013 CatalogJonny Vieira0% (2)
- PC Carbon Manual17595 2011Dokumen117 halamanPC Carbon Manual17595 2011jaon11Belum ada peringkat
- Capítulo 1Dokumen272 halamanCapítulo 1jaon11Belum ada peringkat
- Capítulo 10Dokumen181 halamanCapítulo 10jaon11Belum ada peringkat
- Capítulo 10Dokumen181 halamanCapítulo 10jaon11Belum ada peringkat
- Capítulo 5Dokumen195 halamanCapítulo 5jaon11Belum ada peringkat
- Capítulo 5Dokumen195 halamanCapítulo 5jaon11Belum ada peringkat
- Capítulo 1Dokumen272 halamanCapítulo 1jaon11Belum ada peringkat
- Capítulo 5Dokumen195 halamanCapítulo 5jaon11Belum ada peringkat
- The Difference Between NPTDokumen2 halamanThe Difference Between NPTjaon11Belum ada peringkat
- Understanding The Complexities of Designing Diaphragms in Buildings For EarthquakesDokumen21 halamanUnderstanding The Complexities of Designing Diaphragms in Buildings For Earthquakesjunhe898Belum ada peringkat
- Clausius ClapeyronDokumen2 halamanClausius ClapeyronKarthikeyanBelum ada peringkat
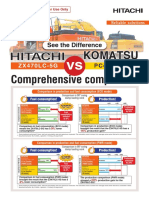
- ZX470-5G Vs Komatsu PC400-8Dokumen3 halamanZX470-5G Vs Komatsu PC400-8Sohibul AminBelum ada peringkat
- CV Rod Manuel TayaoDokumen4 halamanCV Rod Manuel TayaojaymarBelum ada peringkat
- Section 8 Maintenance & SpecificationsDokumen30 halamanSection 8 Maintenance & SpecificationsTaha RdmanBelum ada peringkat
- G100Dokumen48 halamanG100Tom RisleyBelum ada peringkat
- DP09toc PDFDokumen1 halamanDP09toc PDFNerio CanadellBelum ada peringkat
- DT60-DT70S (50 HZ)Dokumen3 halamanDT60-DT70S (50 HZ)Md ShBelum ada peringkat
- SA - Super Inverter - Original File PDFDokumen32 halamanSA - Super Inverter - Original File PDFJojit Cantillep MagbutayBelum ada peringkat
- Catalogo Repuestos YBR125DX 2008 ColombiaDokumen58 halamanCatalogo Repuestos YBR125DX 2008 ColombiaadrielairaldoBelum ada peringkat
- Control Cables PDFDokumen28 halamanControl Cables PDFPandurang NalawadeBelum ada peringkat
- Automatic TransmissionDokumen387 halamanAutomatic Transmissionadialfian2306Belum ada peringkat
- Applied mechanics (CE 101T) - Simple machines overviewDokumen49 halamanApplied mechanics (CE 101T) - Simple machines overviewdarshanBelum ada peringkat
- Appendix CDokumen3 halamanAppendix CMagin Idelfonso TorreblancaBelum ada peringkat
- Operating Manual - Dehumidifier TTK 31 EDokumen17 halamanOperating Manual - Dehumidifier TTK 31 EEşanu ViorelBelum ada peringkat
- 320D & 320D L Excavator Hydraulic System SchematicDokumen15 halaman320D & 320D L Excavator Hydraulic System SchematicchanlinBelum ada peringkat
- B149.03 02-En PDFDokumen4 halamanB149.03 02-En PDFIndra MishraBelum ada peringkat
- 416E Backhoe Loader Maintenance ScheduleDokumen4 halaman416E Backhoe Loader Maintenance ScheduleSain MezaBelum ada peringkat
- MMA welding electrode changes and weld defectsDokumen14 halamanMMA welding electrode changes and weld defectsUmaibalanBelum ada peringkat
- Rav M05 0001Dokumen40 halamanRav M05 0001DanielDeFrancescoBelum ada peringkat
- Gunsmithing and Tool Making Bible by Harold HoffmanDokumen294 halamanGunsmithing and Tool Making Bible by Harold HoffmanS Lucian Stefan100% (2)
- Science 8 q1 w3Dokumen12 halamanScience 8 q1 w3Je-ann AcuBelum ada peringkat
- Mechanical ASTM D2196Dokumen1 halamanMechanical ASTM D2196VasaBelum ada peringkat
- IMO G12 - 218 Despacho Guaduas PDFDokumen21 halamanIMO G12 - 218 Despacho Guaduas PDFCarlos Andres Arias LopezBelum ada peringkat
- CVEN 444 Structural Concrete Design Structural System OverviewDokumen40 halamanCVEN 444 Structural Concrete Design Structural System OverviewAhmed EwisBelum ada peringkat