Anda mungkin juga menyukai
- Download 12,000 Shed PlansDokumen27 halamanDownload 12,000 Shed PlansRadu_IS100% (2)
- Indian ChronologyDokumen467 halamanIndian ChronologyModa Sattva100% (4)
- 2015 - Finite Element Modelling of Debonding Failures in Steel Beams Flexurally Strengthened With CFRP Laminates - Teng Fernando Yu PDFDokumen12 halaman2015 - Finite Element Modelling of Debonding Failures in Steel Beams Flexurally Strengthened With CFRP Laminates - Teng Fernando Yu PDFvlad lupasteanuBelum ada peringkat
- Ppt02-TypesOfProjectionSheet BBDokumen27 halamanPpt02-TypesOfProjectionSheet BBMinh NguyenBelum ada peringkat
- Disappearance of Madeleine McCannDokumen36 halamanDisappearance of Madeleine McCannCopernicBelum ada peringkat
- Non-Linear Static Analysis of Multi-Storied BuildingDokumen5 halamanNon-Linear Static Analysis of Multi-Storied Buildingseventhsensegroup100% (1)
- Differences ASME and ISO GD&TDokumen2 halamanDifferences ASME and ISO GD&TKeith AdminBelum ada peringkat
- Tnea 2022 Round 4 Voc + Gen + 7 5 Grand Analysis Ashwin RDokumen44 halamanTnea 2022 Round 4 Voc + Gen + 7 5 Grand Analysis Ashwin RSai DhanushBelum ada peringkat
- Fatigue Life Assessment of Welded Bridge Details Using Structural Hot Spot Stress MethodDokumen134 halamanFatigue Life Assessment of Welded Bridge Details Using Structural Hot Spot Stress MethodThong NguyenBelum ada peringkat
- Design-II, 2016 Bevel Gear Design ProcedureDokumen1 halamanDesign-II, 2016 Bevel Gear Design ProcedureenggsantuBelum ada peringkat
- Pressure Vessel Inspection ReportDokumen33 halamanPressure Vessel Inspection ReportJinlong SuBelum ada peringkat
- Bond-Slip Model For Detailed Finite-Element AnalysisDokumen10 halamanBond-Slip Model For Detailed Finite-Element AnalysisSilver rayleighBelum ada peringkat
- Bevel GearDokumen17 halamanBevel Gearparesh09Belum ada peringkat
- Subroutine For Cohesive ElementDokumen41 halamanSubroutine For Cohesive ElementBhushanRaj100% (1)
- Bevel ExplanationDokumen4 halamanBevel ExplanationVarun VaidyaBelum ada peringkat
- CohesiveZoneModels PDFDokumen31 halamanCohesiveZoneModels PDFGopal KondaguntaBelum ada peringkat
- Finite Element Analysis of Spur Gear Set PDFDokumen85 halamanFinite Element Analysis of Spur Gear Set PDFCan CemreBelum ada peringkat
- Major Project ShredderDokumen12 halamanMajor Project Shredderaman kumarBelum ada peringkat
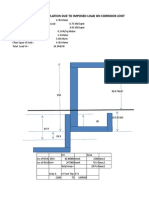
- Deflection Calculation Due To Imposed Load On Corridor JoistDokumen14 halamanDeflection Calculation Due To Imposed Load On Corridor JoistranjitBelum ada peringkat
- List of PEGA Interview Questions and AnswersDokumen33 halamanList of PEGA Interview Questions and Answersknagender100% (1)
- Engineering Drawing Lecture 2Dokumen34 halamanEngineering Drawing Lecture 2Sadia AzamBelum ada peringkat
- Designing Parametric Bevel Gears With Catia V5: 1 Sources, Credits and LinksDokumen10 halamanDesigning Parametric Bevel Gears With Catia V5: 1 Sources, Credits and Linksimrans04Belum ada peringkat
- Machine Design Project ReportDokumen11 halamanMachine Design Project ReportMuhammad Abdullah100% (1)
- OM - Rieter - UNIMix A76Dokumen321 halamanOM - Rieter - UNIMix A76Phineas FerbBelum ada peringkat
- 3 D Toler AncingDokumen19 halaman3 D Toler AncingErnesto MorettorresBelum ada peringkat
- Fulltext01 PDFDokumen108 halamanFulltext01 PDFNGÔ THÁI NGỌ THẦYBelum ada peringkat
- CH 3 Fa2018Dokumen89 halamanCH 3 Fa2018Hassan AliBelum ada peringkat
- The Pathogenic Basis of Malaria: InsightDokumen7 halamanThe Pathogenic Basis of Malaria: InsightRaena SepryanaBelum ada peringkat
- Horizontal Machining Centers: No.40 Spindle TaperDokumen8 halamanHorizontal Machining Centers: No.40 Spindle TaperMax Litvin100% (1)
- Surface Coating ProcessesDokumen7 halamanSurface Coating ProcessesSailabala ChoudhuryBelum ada peringkat
- MESYS Shaft CalculationDokumen51 halamanMESYS Shaft Calculationdd hhBelum ada peringkat
- FEA Report PDFDokumen24 halamanFEA Report PDFDanish JavedBelum ada peringkat
- Contact Pattern Analysis Training ProgramDokumen4 halamanContact Pattern Analysis Training ProgramRAJIV GandhiBelum ada peringkat
- MESYS Shaft Calculation GuideDokumen28 halamanMESYS Shaft Calculation GuideZoebairBelum ada peringkat
- Fea Project ReportDokumen58 halamanFea Project ReportAvnish DubeyBelum ada peringkat
- ME-109 Engineering DrawingDokumen40 halamanME-109 Engineering DrawingHaadin ZamanBelum ada peringkat
- Deep Drawing Analysis by Using Explicit Dynamics in Ansys WorkbenchDokumen8 halamanDeep Drawing Analysis by Using Explicit Dynamics in Ansys Workbenchsunhell1611Belum ada peringkat
- 13 - Chapter - 3 - Kinematics of Backhoe PDFDokumen36 halaman13 - Chapter - 3 - Kinematics of Backhoe PDFKetul ShahBelum ada peringkat
- 226 - Shaking Table Testing of A Steel Framce Structure...Dokumen9 halaman226 - Shaking Table Testing of A Steel Framce Structure...Ing Jaime Espinoza SkinfieldBelum ada peringkat
- Cad Assignment 1Dokumen14 halamanCad Assignment 1Gursewak SinghBelum ada peringkat
- Catalogo Holders TungaloyDokumen156 halamanCatalogo Holders Tungaloyabsalon_jarvBelum ada peringkat
- Short Question Bank CADDokumen3 halamanShort Question Bank CADnravin5Belum ada peringkat
- CAD important questions and tipsDokumen5 halamanCAD important questions and tipsjeroldscdBelum ada peringkat
- AbaqusDokumen4 halamanAbaquscarl_zaissBelum ada peringkat
- 07 Axisymmetric Finite Element ModelingDokumen14 halaman07 Axisymmetric Finite Element ModelingSchubertDeierlein100% (1)
- Features Located To A PatternDokumen4 halamanFeatures Located To A PatternJuan Posada GBelum ada peringkat
- Design For Precision: Current Status and Trends: KeywordsDokumen30 halamanDesign For Precision: Current Status and Trends: KeywordsBrunoBelum ada peringkat
- Thesis Mochammad Rizky DiprasetyaDokumen125 halamanThesis Mochammad Rizky DiprasetyaRizky DsBelum ada peringkat
- 01-Architecture & PlanningDokumen29 halaman01-Architecture & PlanningpragatinareshBelum ada peringkat
- ME8651 Notes Design of Transmission SystemsDokumen71 halamanME8651 Notes Design of Transmission SystemsAslam AhamedBelum ada peringkat
- Design and Optimization Formula SAE DrivetrainDokumen21 halamanDesign and Optimization Formula SAE DrivetrainIJRASETPublicationsBelum ada peringkat
- Cadcam Geometric ModelingDokumen31 halamanCadcam Geometric ModelingPankaj ChhabraBelum ada peringkat
- BITSF110 Course HandoutDokumen3 halamanBITSF110 Course HandoutultimateBelum ada peringkat
- Iso5455 79Dokumen4 halamanIso5455 79Sebastian PopBelum ada peringkat
- Lecture 2A Macro Mechanics Stress Strain Relations For Material TypesDokumen15 halamanLecture 2A Macro Mechanics Stress Strain Relations For Material TypesHarish ShridharamurthyBelum ada peringkat
- Technical Drawing StandardsDokumen11 halamanTechnical Drawing StandardsSeunBelum ada peringkat
- Tolerance Analysis Methods, Platforms and Trends - Comprehensive OverviewDokumen7 halamanTolerance Analysis Methods, Platforms and Trends - Comprehensive Overviewnagmech07Belum ada peringkat
- Cost Reduction and Light Weighting (BIW)Dokumen25 halamanCost Reduction and Light Weighting (BIW)tran hungBelum ada peringkat
- Contact Stress Analysis of Spur Gear Teeth Pair PDFDokumen6 halamanContact Stress Analysis of Spur Gear Teeth Pair PDFCan CemreBelum ada peringkat
- Trends in Machinetools PDFDokumen6 halamanTrends in Machinetools PDFmohan SRBelum ada peringkat
- Submitted By: Structural Analysis of Modified Bumper of Car With Honeycomb Structure Using AnsysDokumen18 halamanSubmitted By: Structural Analysis of Modified Bumper of Car With Honeycomb Structure Using AnsysAlex Pandian SBelum ada peringkat
- Spiral Springs PDFDokumen18 halamanSpiral Springs PDFEngr Eze Chuklet ChukwumaBelum ada peringkat
- Surface FinishDokumen27 halamanSurface Finishykc38Belum ada peringkat
- Design of Spur Gear - Fundamentals - 1Dokumen19 halamanDesign of Spur Gear - Fundamentals - 1Dhyan PatelBelum ada peringkat
- Involute Gear ProfileDokumen8 halamanInvolute Gear ProfiledressfeetBelum ada peringkat
- 2 Gear BasicsDokumen6 halaman2 Gear BasicsMohamed Adel RizkBelum ada peringkat
- Cad Lab Report 5Dokumen11 halamanCad Lab Report 5Areeba MujtabaBelum ada peringkat
- Optimal Search Results Over Cloud With A Novel Ranking ApproachDokumen5 halamanOptimal Search Results Over Cloud With A Novel Ranking ApproachseventhsensegroupBelum ada peringkat
- FPGA Based Design and Implementation of Image Edge Detection Using Xilinx System GeneratorDokumen4 halamanFPGA Based Design and Implementation of Image Edge Detection Using Xilinx System GeneratorseventhsensegroupBelum ada peringkat
- Comparison of The Effects of Monochloramine and Glutaraldehyde (Biocides) Against Biofilm Microorganisms in Produced WaterDokumen8 halamanComparison of The Effects of Monochloramine and Glutaraldehyde (Biocides) Against Biofilm Microorganisms in Produced WaterseventhsensegroupBelum ada peringkat
- Experimental Investigation On Performance, Combustion Characteristics of Diesel Engine by Using Cotton Seed OilDokumen7 halamanExperimental Investigation On Performance, Combustion Characteristics of Diesel Engine by Using Cotton Seed OilseventhsensegroupBelum ada peringkat
- High Speed Architecture Design of Viterbi Decoder Using Verilog HDLDokumen7 halamanHigh Speed Architecture Design of Viterbi Decoder Using Verilog HDLseventhsensegroupBelum ada peringkat
- Application of Sparse Matrix Converter For Microturbine-Permanent Magnet Synchronous Generator Output Voltage Quality EnhancementDokumen8 halamanApplication of Sparse Matrix Converter For Microturbine-Permanent Magnet Synchronous Generator Output Voltage Quality EnhancementseventhsensegroupBelum ada peringkat
- An Efficient Model of Detection and Filtering Technique Over Malicious and Spam E-MailsDokumen4 halamanAn Efficient Model of Detection and Filtering Technique Over Malicious and Spam E-MailsseventhsensegroupBelum ada peringkat
- Fabrication of High Speed Indication and Automatic Pneumatic Braking SystemDokumen7 halamanFabrication of High Speed Indication and Automatic Pneumatic Braking Systemseventhsensegroup0% (1)
- Extended Kalman Filter Based State Estimation of Wind TurbineDokumen5 halamanExtended Kalman Filter Based State Estimation of Wind TurbineseventhsensegroupBelum ada peringkat
- A Multi-Level Storage Tank Gauging and Monitoring System Using A Nanosecond PulseDokumen8 halamanA Multi-Level Storage Tank Gauging and Monitoring System Using A Nanosecond PulseseventhsensegroupBelum ada peringkat
- Color Constancy For Light SourcesDokumen6 halamanColor Constancy For Light SourcesseventhsensegroupBelum ada peringkat
- An Efficient and Empirical Model of Distributed ClusteringDokumen5 halamanAn Efficient and Empirical Model of Distributed ClusteringseventhsensegroupBelum ada peringkat
- Comparison of The Regression Equations in Different Places Using Total StationDokumen4 halamanComparison of The Regression Equations in Different Places Using Total StationseventhsensegroupBelum ada peringkat
- Design, Development and Performance Evaluation of Solar Dryer With Mirror Booster For Red Chilli (Capsicum Annum)Dokumen7 halamanDesign, Development and Performance Evaluation of Solar Dryer With Mirror Booster For Red Chilli (Capsicum Annum)seventhsensegroupBelum ada peringkat
- Implementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationDokumen6 halamanImplementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationseventhsensegroupBelum ada peringkat
- Ijett V5N1P103Dokumen4 halamanIjett V5N1P103Yosy NanaBelum ada peringkat
- Design and Implementation of Height Adjustable Sine (Has) Window-Based Fir Filter For Removing Powerline Noise in ECG SignalDokumen5 halamanDesign and Implementation of Height Adjustable Sine (Has) Window-Based Fir Filter For Removing Powerline Noise in ECG SignalseventhsensegroupBelum ada peringkat
- The Utilization of Underbalanced Drilling Technology May Minimize Tight Gas Reservoir Formation Damage: A Review StudyDokumen3 halamanThe Utilization of Underbalanced Drilling Technology May Minimize Tight Gas Reservoir Formation Damage: A Review StudyseventhsensegroupBelum ada peringkat
- Study On Fly Ash Based Geo-Polymer Concrete Using AdmixturesDokumen4 halamanStudy On Fly Ash Based Geo-Polymer Concrete Using AdmixturesseventhsensegroupBelum ada peringkat
- Separation Of, , & Activities in EEG To Measure The Depth of Sleep and Mental StatusDokumen6 halamanSeparation Of, , & Activities in EEG To Measure The Depth of Sleep and Mental StatusseventhsensegroupBelum ada peringkat
- An Efficient Expert System For Diabetes by Naïve Bayesian ClassifierDokumen6 halamanAn Efficient Expert System For Diabetes by Naïve Bayesian ClassifierseventhsensegroupBelum ada peringkat
- An Efficient Encrypted Data Searching Over Out Sourced DataDokumen5 halamanAn Efficient Encrypted Data Searching Over Out Sourced DataseventhsensegroupBelum ada peringkat
- Review On Different Types of Router Architecture and Flow ControlDokumen4 halamanReview On Different Types of Router Architecture and Flow ControlseventhsensegroupBelum ada peringkat
- Ijett V4i10p158Dokumen6 halamanIjett V4i10p158pradeepjoshi007Belum ada peringkat
- Key Drivers For Building Quality in Design PhaseDokumen6 halamanKey Drivers For Building Quality in Design PhaseseventhsensegroupBelum ada peringkat
- Free Vibration Characteristics of Edge Cracked Functionally Graded Beams by Using Finite Element MethodDokumen8 halamanFree Vibration Characteristics of Edge Cracked Functionally Graded Beams by Using Finite Element MethodseventhsensegroupBelum ada peringkat
- A Review On Energy Efficient Secure Routing For Data Aggregation in Wireless Sensor NetworksDokumen5 halamanA Review On Energy Efficient Secure Routing For Data Aggregation in Wireless Sensor NetworksseventhsensegroupBelum ada peringkat
- A Comparative Study of Impulse Noise Reduction in Digital Images For Classical and Fuzzy FiltersDokumen6 halamanA Comparative Study of Impulse Noise Reduction in Digital Images For Classical and Fuzzy FiltersseventhsensegroupBelum ada peringkat
- Performance and Emissions Characteristics of Diesel Engine Fuelled With Rice Bran OilDokumen5 halamanPerformance and Emissions Characteristics of Diesel Engine Fuelled With Rice Bran OilseventhsensegroupBelum ada peringkat
- L P 10Dokumen13 halamanL P 10Bình Minh HoàngBelum ada peringkat
- Snorkeling: A Brief History and Guide to This Underwater AdventureDokumen3 halamanSnorkeling: A Brief History and Guide to This Underwater AdventureBernadette PerezBelum ada peringkat
- Turabian Sample PaperDokumen9 halamanTurabian Sample Paperemme_lopez908133% (3)
- Magnets Catalog 2001Dokumen20 halamanMagnets Catalog 2001geckx100% (2)
- 2.7.3 Lab Use Steganography To Hide Data Answer KeyDokumen3 halaman2.7.3 Lab Use Steganography To Hide Data Answer KeyVivek GaonkarBelum ada peringkat
- GuideDokumen2 halamanGuideMaissyBelum ada peringkat
- Process of Producting High Carbon Ferro ChromeDokumen5 halamanProcess of Producting High Carbon Ferro ChromeSantosh Kumar MahtoBelum ada peringkat
- A. Hardened Concrete (Non-Destructive Tests) : The SAC Programme Is Managed by Enterprise SingaporeDokumen2 halamanA. Hardened Concrete (Non-Destructive Tests) : The SAC Programme Is Managed by Enterprise Singaporeng chee yongBelum ada peringkat
- 740 (Q50, V40, Awa 4Dokumen10 halaman740 (Q50, V40, Awa 4rawat2583Belum ada peringkat
- HUMAN RIGHTS, RATIONALITY, AND SENTIMENTALITYDokumen13 halamanHUMAN RIGHTS, RATIONALITY, AND SENTIMENTALITYJohn HunterBelum ada peringkat
- Administrations whose CoCs are accepted for CECDokumen1 halamanAdministrations whose CoCs are accepted for CECGonçalo CruzeiroBelum ada peringkat
- Electronics Foundations - Basic CircuitsDokumen20 halamanElectronics Foundations - Basic Circuitsccorp0089Belum ada peringkat
- Strata KT Office OpportunityDokumen41 halamanStrata KT Office OpportunitySanskar SurekaBelum ada peringkat
- Rock Laboratory PricelistDokumen1 halamanRock Laboratory PricelistHerbakti Dimas PerdanaBelum ada peringkat
- ManuscriptDokumen2 halamanManuscriptVanya QuistoBelum ada peringkat
- 4D - Yulianti Viviana - Exercise 9Dokumen7 halaman4D - Yulianti Viviana - Exercise 9Uli JennerBelum ada peringkat
- PPM To Percent Conversion Calculator Number ConversionDokumen1 halamanPPM To Percent Conversion Calculator Number ConversionSata ChaimongkolsupBelum ada peringkat
- Occupant Load CalculationsDokumen60 halamanOccupant Load CalculationsKAIVALYA TIWATNEBelum ada peringkat
- Grade 4 DLL Quarter 2 Week 2 Sir Bien CruzDokumen47 halamanGrade 4 DLL Quarter 2 Week 2 Sir Bien CruzRonel Fillomena0% (1)
- Salford Care Organisation Job Description & Person SpecificationDokumen14 halamanSalford Care Organisation Job Description & Person SpecificationAyesha EhsanBelum ada peringkat
- GEHC DICOM Conformance CentricityRadiologyRA600 V6 1 DCM 1030 001 Rev6 1 1Dokumen73 halamanGEHC DICOM Conformance CentricityRadiologyRA600 V6 1 DCM 1030 001 Rev6 1 1mrzdravko15Belum ada peringkat
- Lab Report AcetaminophenDokumen5 halamanLab Report Acetaminophenapi-487596846Belum ada peringkat