Anda mungkin juga menyukai
- Computer Fundamentals & Office Tools NotesDokumen67 halamanComputer Fundamentals & Office Tools Notesmnnappaji88% (16)
- 210 MW Turbine GoverningDokumen16 halaman210 MW Turbine GoverningAshish Subramanian100% (1)
- CTC-211 Engine SystemsDokumen393 halamanCTC-211 Engine SystemsGoutam Saha100% (1)
- Seal Oil and Hydrogen SystemDokumen34 halamanSeal Oil and Hydrogen Systemashish_ntpcBelum ada peringkat
- FSSS-Furnace Safeguard Supervisory SystemDokumen22 halamanFSSS-Furnace Safeguard Supervisory SystemNitish KumarBelum ada peringkat
- BHEL's Bowl Mills and Their FeaturesDokumen12 halamanBHEL's Bowl Mills and Their FeaturesAbhishek KumarBelum ada peringkat
- Sliding PR OperationDokumen10 halamanSliding PR Operationrohit_0123Belum ada peringkat
- 2.final Energy EfficiencyDokumen29 halaman2.final Energy EfficiencyVandana VanuBelum ada peringkat
- Plate Type Heat ExchangerDokumen28 halamanPlate Type Heat ExchangerJagadeesan Sai100% (1)
- KWU Steam Turbine Module DesignDokumen14 halamanKWU Steam Turbine Module Designbhaskar100% (1)
- Prsentation: Ball and Tube MillDokumen39 halamanPrsentation: Ball and Tube MillmkoelrealBelum ada peringkat
- Maximizing Plant Performance with Coordinated Boiler and Turbine ControlDokumen28 halamanMaximizing Plant Performance with Coordinated Boiler and Turbine ControlJhoBelum ada peringkat
- BHEL SupercriticalDokumen87 halamanBHEL SupercriticalBottle ManiBelum ada peringkat
- RHH and LTSH links overviewDokumen4 halamanRHH and LTSH links overviewrpshvjuBelum ada peringkat
- Sliding Pressure Operation in Combined CyclesDokumen5 halamanSliding Pressure Operation in Combined CyclesJeeEianYannBelum ada peringkat
- 500 MW Turbine Cycle DescriptionDokumen8 halaman500 MW Turbine Cycle DescriptionAhemadBelum ada peringkat
- Turbine & Its Governing and Turbo Generator AlokDokumen143 halamanTurbine & Its Governing and Turbo Generator AlokSHAMSIK2002100% (3)
- EHC1Dokumen30 halamanEHC1Jagadeesan SaiBelum ada peringkat
- EHC1Dokumen30 halamanEHC1Jagadeesan SaiBelum ada peringkat
- TSC 2Dokumen15 halamanTSC 2Manoj UpadhyayBelum ada peringkat
- PLC Pu-Plc OrmarDokumen45 halamanPLC Pu-Plc OrmarAlmir MurselovićBelum ada peringkat
- Report EHTC HuntingDokumen10 halamanReport EHTC HuntingOTPC POWERBelum ada peringkat
- Performance Analysis of Surface Condenser in 525MW Thermal Power Plant PDFDokumen9 halamanPerformance Analysis of Surface Condenser in 525MW Thermal Power Plant PDFJeeEianYannBelum ada peringkat
- Coal-Mill Optimisation in Coal-Fired Power Stations Aids FlexibilityDokumen9 halamanCoal-Mill Optimisation in Coal-Fired Power Stations Aids FlexibilityTinyiko S. MalulekeBelum ada peringkat
- Soot BlowersDokumen264 halamanSoot BlowersNitin Sen100% (1)
- CMC NTPC Unchahar PDFDokumen48 halamanCMC NTPC Unchahar PDFDinoBelum ada peringkat
- Jindal Power SOP Load Shedding RelayDokumen4 halamanJindal Power SOP Load Shedding RelayChandramani PatelBelum ada peringkat
- TRANSDUCERDokumen11 halamanTRANSDUCERLucks GonzalesBelum ada peringkat
- Introduction To Turbovisory InstrumentsDokumen40 halamanIntroduction To Turbovisory InstrumentsSam0% (1)
- Gen-Seal&cool-New - 500 MWDokumen98 halamanGen-Seal&cool-New - 500 MWharisankar100% (2)
- Air Pre-Heater: - An Essential Component in Fossil Fuel Fired PlantDokumen66 halamanAir Pre-Heater: - An Essential Component in Fossil Fuel Fired PlantRaushan Kumar100% (1)
- OBD-II DTC Database - Body Codes (B0xxx, B3xxx)Dokumen3 halamanOBD-II DTC Database - Body Codes (B0xxx, B3xxx)María Martz De GarcíaBelum ada peringkat
- BHEL FANS - Best Operation PracticesDokumen19 halamanBHEL FANS - Best Operation Practiceshonchoabhi100% (1)
- Turbine Supervisory System ParametersDokumen34 halamanTurbine Supervisory System ParametersSuman GhoshBelum ada peringkat
- Turbine Working & ItsComponentsDokumen88 halamanTurbine Working & ItsComponentsHimanshu spoliaBelum ada peringkat
- Write Up On GeneratorDokumen62 halamanWrite Up On GeneratorAbhishek RanjanBelum ada peringkat
- Reducing Boiler Cooling Time Saves Rs. 13.5 Crore AnnuallyDokumen16 halamanReducing Boiler Cooling Time Saves Rs. 13.5 Crore Annuallyjp mishraBelum ada peringkat
- EHTCDokumen22 halamanEHTCVicky Singh100% (1)
- Ortea Orion Plus 3 PhaseDokumen2 halamanOrtea Orion Plus 3 PhaseReymart ManablugBelum ada peringkat
- Shaft Turning GearDokumen22 halamanShaft Turning GearJagadeesan Sai86% (7)
- CH 7 Paper 5 Flue Gas Temp Optimisation - Vindhyachal - ActualDokumen6 halamanCH 7 Paper 5 Flue Gas Temp Optimisation - Vindhyachal - ActualSamBelum ada peringkat
- Operation Best PracticesDokumen30 halamanOperation Best Practicesjp mishraBelum ada peringkat
- CC PumpsDokumen38 halamanCC PumpsvijaykrishnatennetiBelum ada peringkat
- DR NTTPSDokumen41 halamanDR NTTPSnagasuresh100% (1)
- CMCDokumen32 halamanCMCAnubhav Amu PanditBelum ada peringkat
- DEAERATORDokumen32 halamanDEAERATORJagadeesan Sai100% (2)
- Fluid CouplingDokumen20 halamanFluid CouplingJagadeesan SaiBelum ada peringkat
- Chapter 12Dokumen12 halamanChapter 12bhaskarBelum ada peringkat
- Turbovisory SystemDokumen2 halamanTurbovisory SystemLily Sharma100% (1)
- Superheaters and ReheaterDokumen16 halamanSuperheaters and ReheaterBudi NortonBelum ada peringkat
- Cold Start Up 1Dokumen16 halamanCold Start Up 1Hassan SamiBelum ada peringkat
- 135 MW TGSDokumen19 halaman135 MW TGSPrudhvi RajBelum ada peringkat
- TG Referal DatapediaDokumen20 halamanTG Referal Datapediajp mishraBelum ada peringkat
- 02 FSSS Logic SystemDokumen51 halaman02 FSSS Logic SystemSam100% (3)
- Slagging in Steam Generators: Root Cause AnalysisDokumen8 halamanSlagging in Steam Generators: Root Cause AnalysispiyushagaBelum ada peringkat
- Turbine Condensate and Feed Water SystemDokumen37 halamanTurbine Condensate and Feed Water SystemShubham VermaBelum ada peringkat
- Boiler & Its Auxiliaries Gyanendra Sharma Npti DelhiDokumen36 halamanBoiler & Its Auxiliaries Gyanendra Sharma Npti DelhiNPTIBelum ada peringkat
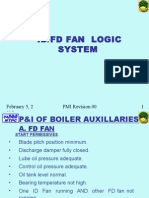
- ID FD PA Logic SystemDokumen11 halamanID FD PA Logic SystemThirumalBelum ada peringkat
- APH-A Air MotorDokumen1 halamanAPH-A Air Motorjp mishra100% (1)
- Thermal Power PlantDokumen13 halamanThermal Power PlantSanat KumarBelum ada peringkat
- FANS: Types, Features, Selection FactorsDokumen15 halamanFANS: Types, Features, Selection FactorsgvprambabuBelum ada peringkat
- Boiler OverviewDokumen35 halamanBoiler Overviewshashank dasBelum ada peringkat
- Presented By-T.Mahendra Reddy Ankur Sahoo Shubham VarmaDokumen30 halamanPresented By-T.Mahendra Reddy Ankur Sahoo Shubham VarmaShubham VermaBelum ada peringkat
- CondensateDokumen47 halamanCondensateSam50% (2)
- Sagar Pandey AtpDokumen44 halamanSagar Pandey AtpIshankBelum ada peringkat
- Bowl MillDokumen10 halamanBowl MillAvtarBelum ada peringkat
- Understanding Air Preheater Performance: Storm Technologies, IncDokumen4 halamanUnderstanding Air Preheater Performance: Storm Technologies, IncMahesh MishraBelum ada peringkat
- 13 MW Steam Turbine 50 HZ NewDokumen6 halaman13 MW Steam Turbine 50 HZ Newteewee_cuteBelum ada peringkat
- CMC FinalDokumen30 halamanCMC FinalSam100% (1)
- Steam TurbineDokumen26 halamanSteam TurbineYudha Simbolon100% (1)
- Modification in 500MW CBD Line For Proper Boiler Water SamplingDokumen54 halamanModification in 500MW CBD Line For Proper Boiler Water SamplingJackSparrow86Belum ada peringkat
- Boiler AnimationDokumen1 halamanBoiler AnimationJagadeesan SaiBelum ada peringkat
- Nat Dra - Cooling Tower PDFDokumen43 halamanNat Dra - Cooling Tower PDFJagadeesan SaiBelum ada peringkat
- Boiler AnimationDokumen1 halamanBoiler AnimationJagadeesan Sai100% (1)
- Chapter9 PDFDokumen8 halamanChapter9 PDFJagadeesan SaiBelum ada peringkat
- Tower BoilerDokumen21 halamanTower BoilerJagadeesan SaiBelum ada peringkat
- Fuel Handling System Operation ManualDokumen17 halamanFuel Handling System Operation ManualJagadeesan SaiBelum ada peringkat
- Welcome TO THE Presentation OnDokumen26 halamanWelcome TO THE Presentation OnJagadeesan SaiBelum ada peringkat
- Air PreheatersDokumen84 halamanAir PreheatersJagadeesan SaiBelum ada peringkat
- Guidelines for Managing Blood Pressure and Lifestyle ModificationDokumen12 halamanGuidelines for Managing Blood Pressure and Lifestyle Modificationmsn722005Belum ada peringkat
- Chapter II FhsDokumen91 halamanChapter II FhsJagadeesan SaiBelum ada peringkat
- 117 Pumps PDFDokumen20 halaman117 Pumps PDFJagadeesan SaiBelum ada peringkat
- 12th English 1 Blue PrintDokumen3 halaman12th English 1 Blue PrintGowtham RajBelum ada peringkat
- AirconditioningDokumen21 halamanAirconditioningJagadeesan SaiBelum ada peringkat
- StudytransformersDokumen55 halamanStudytransformersManuel Alejandro Echeverry LopezBelum ada peringkat
- CentrifugeDokumen14 halamanCentrifugeJagadeesan Sai0% (1)
- Two-Finger InP HEMT Design For Stable Cryogenic Operation of Ultra-Low-Noise Ka - and Q-Band LNAsDokumen10 halamanTwo-Finger InP HEMT Design For Stable Cryogenic Operation of Ultra-Low-Noise Ka - and Q-Band LNAskarthik srivatsa mbBelum ada peringkat
- Emr 4Dokumen39 halamanEmr 4RaulBelum ada peringkat
- NTPC Anta Combined CycleDokumen25 halamanNTPC Anta Combined CycleSiyaram MeenaBelum ada peringkat
- Chapter 6: I/O Why I/O?Dokumen19 halamanChapter 6: I/O Why I/O?Pavan NavBelum ada peringkat
- Batel - Presentation 2020r1Dokumen63 halamanBatel - Presentation 2020r1HÜSEYİN GÜRTAŞBelum ada peringkat
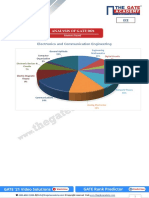
- Gate Analysis 2021 Ece - v2Dokumen16 halamanGate Analysis 2021 Ece - v2learning duniaBelum ada peringkat
- Analysis, Design, and Prototyping of A Narrow-Band Radio For Application in Wireless Sensor NetworksDokumen126 halamanAnalysis, Design, and Prototyping of A Narrow-Band Radio For Application in Wireless Sensor NetworksA. VillaBelum ada peringkat
- Ug948 Vivado Sysgen TutorialDokumen137 halamanUg948 Vivado Sysgen TutorialQuỳnh Lê CôngBelum ada peringkat
- Design of Wireless Networks Linking Technology For Connecting Health Centers in Rural AreasDokumen13 halamanDesign of Wireless Networks Linking Technology For Connecting Health Centers in Rural AreasEighthSenseGroupBelum ada peringkat
- Nonlinear Op-Amp Circuits and Logarithmic AmplifiersDokumen31 halamanNonlinear Op-Amp Circuits and Logarithmic AmplifiersBeth ValerdiBelum ada peringkat
- LJ Mae Templa ICT Quarter3-M1Dokumen4 halamanLJ Mae Templa ICT Quarter3-M1Ashley TanBelum ada peringkat
- PHY 221 Long Quiz #3 - MagnetismDokumen1 halamanPHY 221 Long Quiz #3 - MagnetismCatherine Shaina O. PasionBelum ada peringkat
- BMA Physics Class 10Dokumen31 halamanBMA Physics Class 10Faiz KhanBelum ada peringkat
- Nguyen Le Quang 1852696 Homework #3: K Gs SsDokumen8 halamanNguyen Le Quang 1852696 Homework #3: K Gs SsKiet PhamBelum ada peringkat
- HPSEB overview and initiativesDokumen56 halamanHPSEB overview and initiativesbjp1961Belum ada peringkat
- Baldor-Reliance AC & DC Motor Installation & MaintenanceDokumen4 halamanBaldor-Reliance AC & DC Motor Installation & MaintenanceAriawan HasnanBelum ada peringkat
- Manual de Usuario de La Consola Tapco Mix260fxDokumen28 halamanManual de Usuario de La Consola Tapco Mix260fxFrank ColmenaresBelum ada peringkat
- Interrupt vector table: An essential data structureDokumen3 halamanInterrupt vector table: An essential data structureSAMEER AHMADBelum ada peringkat
- Parts of A Computer System Unit (Components)Dokumen31 halamanParts of A Computer System Unit (Components)Anonymous PcPkRpAKD5Belum ada peringkat
- Single line diagram (กรอบสีแดงฝั่งDokumen1 halamanSingle line diagram (กรอบสีแดงฝั่งPariwat WongworanateBelum ada peringkat
- Electrical EngineeringDokumen1 halamanElectrical EngineeringRanjana UpadhayayBelum ada peringkat
- Multiplexing: Techniques in Optical Networks: WDMDokumen28 halamanMultiplexing: Techniques in Optical Networks: WDMSahil SinghBelum ada peringkat
- 3 NAB 7th PDFDokumen218 halaman3 NAB 7th PDFHitech DevicesBelum ada peringkat
- Presion TempDokumen36 halamanPresion Tempmauricio ceballosBelum ada peringkat