Anda mungkin juga menyukai
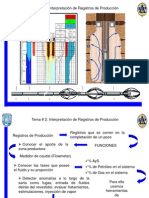
- Interpretación de Registros de ProducciónDokumen173 halamanInterpretación de Registros de ProducciónEmerson Ipiales Gudiño100% (2)
- Arquitectura BergantinDokumen144 halamanArquitectura BergantinAnonymous deDe9r100% (1)
- Financiamiento Interno y ExternoDokumen5 halamanFinanciamiento Interno y ExternoJoseBelum ada peringkat
- Eco CanvasDokumen2 halamanEco CanvasAlonso CatterBelum ada peringkat
- Introduccion VoipDokumen46 halamanIntroduccion VoipKenia Xiomara Escalante MoralesBelum ada peringkat
- Configuración Del Protocolo de Troncal VLANDokumen25 halamanConfiguración Del Protocolo de Troncal VLANPegasus1986Belum ada peringkat
- Manual de MysqlDokumen20 halamanManual de MysqlLee Kyung HeeBelum ada peringkat
- SQLDokumen19 halamanSQLPegasus1986Belum ada peringkat
- Cur So Map Info 5Dokumen55 halamanCur So Map Info 5Malvinita100% (2)
- Metodo Pesades RUPDokumen12 halamanMetodo Pesades RUPPegasus1986Belum ada peringkat
- Analisis de Sistemas Lineales Muy ImportanteDokumen495 halamanAnalisis de Sistemas Lineales Muy ImportantePegasus1986Belum ada peringkat
- Referencia de DispositivosDokumen58 halamanReferencia de Dispositivoscelyn280482Belum ada peringkat
- Ciencias 8 Basico, 16 Al 20 de AgostoDokumen1 halamanCiencias 8 Basico, 16 Al 20 de AgostoSandra Morales GuerraBelum ada peringkat
- Formato de Presentación de La ActividadDokumen2 halamanFormato de Presentación de La ActividadJ B100% (2)
- Pasos para Formatear Una ComputadoraDokumen2 halamanPasos para Formatear Una ComputadoraAngel Matthew de Mirnd-RodBelum ada peringkat
- Matemática Básica para AdministracionDokumen5 halamanMatemática Básica para AdministracionJorge Jairo Aliaga LeivaBelum ada peringkat
- Informe N°006 Insumos para Cartel de ObraDokumen1 halamanInforme N°006 Insumos para Cartel de ObraMargory Inay Mori GarciaBelum ada peringkat
- Test Es Usted NegociadorDokumen5 halamanTest Es Usted NegociadorStephany VillanuevaBelum ada peringkat
- Investigación Temática, Diseño Formal, Equipo 3Dokumen31 halamanInvestigación Temática, Diseño Formal, Equipo 3Keiry Belén Ramos OrozcoBelum ada peringkat
- Problemas Sabado 18Dokumen4 halamanProblemas Sabado 18MirnaYulissaCabreraZavaletaBelum ada peringkat
- 1 Generalidades Alcantarillado LRMNDokumen22 halaman1 Generalidades Alcantarillado LRMNLenin MaldonadoBelum ada peringkat
- Documento Sin TítuloDokumen2 halamanDocumento Sin TítuloCarlosKikeGutierrezBelum ada peringkat
- 1° Informe Ley de NewtonDokumen10 halaman1° Informe Ley de NewtonLucia Pacheco VasquezBelum ada peringkat
- Turegano MansillaDokumen9 halamanTuregano MansillasofinapoleBelum ada peringkat
- 01 The Caso Walt Disney CompanyDokumen4 halaman01 The Caso Walt Disney CompanySergio UgarteBelum ada peringkat
- Guía de Aprendizaje DISEÑO DE PRODUCTODokumen7 halamanGuía de Aprendizaje DISEÑO DE PRODUCTOOmaira Liliana TipasBelum ada peringkat
- Musumeci - ConservatoriosDokumen26 halamanMusumeci - ConservatoriosLEEM FBA-UNLPBelum ada peringkat
- P1 PDFDokumen112 halamanP1 PDFBryan ChavezBelum ada peringkat
- Topografía I - Teoría de ProbabilidadesDokumen7 halamanTopografía I - Teoría de ProbabilidadesJunior Quispe HuarcayaBelum ada peringkat
- Estanque Con Agitación PDFDokumen105 halamanEstanque Con Agitación PDFIgnacio Alvarez MendozaBelum ada peringkat
- Sig y Datos AbiertosDokumen16 halamanSig y Datos AbiertosCARL.OS ADRIAN LOPEZ VBelum ada peringkat
- Grupo 8 - Semana15Dokumen24 halamanGrupo 8 - Semana15Giuliette RosarioBelum ada peringkat
- Colector Ciclónico de PolvoDokumen17 halamanColector Ciclónico de PolvoPierre799es100% (1)
- Transferencia Del CalorDokumen8 halamanTransferencia Del CalorLucas WalkerBelum ada peringkat
- 7 2 Teoria ColasDokumen30 halaman7 2 Teoria ColasRigobertoAlexandValladaresBelum ada peringkat
- CALENDARIOSDokumen2 halamanCALENDARIOSCristina Del PradoBelum ada peringkat
- Literatura El PeatonDokumen11 halamanLiteratura El Peatonana gabriela trindade bentancourtBelum ada peringkat