Anda mungkin juga menyukai
- Saavedra Nicol - TAREA 1Dokumen2 halamanSaavedra Nicol - TAREA 1Nicol Saavedra CallaúBelum ada peringkat
- 1 4936238804152353882Dokumen271 halaman1 4936238804152353882Marcia V FerreroBelum ada peringkat
- Arrieta Iñaki, El Complicado Arte de ExponerDokumen11 halamanArrieta Iñaki, El Complicado Arte de ExponerAldii BrizuelaBelum ada peringkat
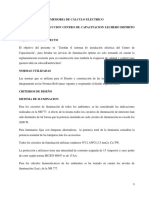
- Memoria de Calculo Electrico SuquichaDokumen5 halamanMemoria de Calculo Electrico SuquichasermucomBelum ada peringkat
- PBL 2Dokumen6 halamanPBL 2Tamara VallejoBelum ada peringkat
- TesisDokumen103 halamanTesisStalim Ravichagua QuintoBelum ada peringkat
- Teoria de La Inferencia CorrespondienteDokumen6 halamanTeoria de La Inferencia CorrespondienteMidory PlascenciaBelum ada peringkat
- Tablas ShapiroDokumen44 halamanTablas ShapiroWelder BonillaBelum ada peringkat
- Radioterapia IMRTDokumen137 halamanRadioterapia IMRTJaviBelum ada peringkat
- 1309 Anticorrosivo Marino Pu 403Dokumen2 halaman1309 Anticorrosivo Marino Pu 403Alejandro 20Belum ada peringkat
- Pi 001765Dokumen113 halamanPi 001765Eric reyesBelum ada peringkat
- Portafolio de Evidencias - VistaDokumen9 halamanPortafolio de Evidencias - VistaAileen LandinBelum ada peringkat
- Resumen Del Libro La MetaDokumen6 halamanResumen Del Libro La MetaCLAUDIA CUACIALPUD LASSO0% (1)
- An Introduction To Cognitive Psychology - David GroomeDokumen48 halamanAn Introduction To Cognitive Psychology - David GroomeCaroline LopezBelum ada peringkat
- Formato de Reporte de TutoríaDokumen3 halamanFormato de Reporte de TutoríaNorelkysortizBelum ada peringkat
- Educación Integral en Sexualidad en El AulaDokumen51 halamanEducación Integral en Sexualidad en El AulaOmar Coronado NavarroBelum ada peringkat
- Revista Edad de Oro. Vol. IXDokumen350 halamanRevista Edad de Oro. Vol. IXlargodomingoBelum ada peringkat
- Jerarquía de EmocionesDokumen15 halamanJerarquía de EmocionesVALDIVIA100% (1)
- ALGORITMOS CompressedDokumen45 halamanALGORITMOS CompressedJHOAN JHONCLER BOCANEGRA PONCEBelum ada peringkat
- Examen Final Enviar 24 Mayo 22Dokumen8 halamanExamen Final Enviar 24 Mayo 22Sebastián Hernández GonzálezBelum ada peringkat
- PD. Cinetica de Un Punto Material. - Segunda Ley Del MovimientoDokumen2 halamanPD. Cinetica de Un Punto Material. - Segunda Ley Del MovimientoChristian Chavez PereyraBelum ada peringkat
- Los Dinamos - Google MapsDokumen7 halamanLos Dinamos - Google Mapsalexbeta1989Belum ada peringkat
- Ficha Docentes Seguimiento A Sesiones Aprendo en CasaDokumen11 halamanFicha Docentes Seguimiento A Sesiones Aprendo en CasaLeydi Borda100% (1)
- Epistemologia Consolidacion Final Act. 10 Trabajo ColaborativoDokumen8 halamanEpistemologia Consolidacion Final Act. 10 Trabajo ColaborativoZayiris VelasquezBelum ada peringkat
- Propuesta Diseño Urbano 5 Marzo 2021 2.5 HectareasDokumen5 halamanPropuesta Diseño Urbano 5 Marzo 2021 2.5 HectareasHassan velasquez solanoBelum ada peringkat
- Tarjetas SCSI: Diego Hernández Juan RiañoDokumen7 halamanTarjetas SCSI: Diego Hernández Juan RiañoDIEGO ARLEY HERNANDEZ BERNALBelum ada peringkat
- Corporación Miyasato SDokumen5 halamanCorporación Miyasato SWilly QuentaBelum ada peringkat
- Tarea Semana 7 Procesos ExtractivosDokumen6 halamanTarea Semana 7 Procesos ExtractivosEmol Soto Alfaro100% (6)
- Reseña Historicas de Los Custodios.Dokumen9 halamanReseña Historicas de Los Custodios.yuli diazBelum ada peringkat
- EL CASO de GENIE (Psicología) Raquel y MarinaDokumen5 halamanEL CASO de GENIE (Psicología) Raquel y MarinaMarinaBelum ada peringkat