Anda mungkin juga menyukai
- Capacitores de CalibraçãoDokumen2 halamanCapacitores de CalibraçãoALEX_INSPETORBelum ada peringkat
- Desbalanceamento Rotativo Vibrações IsolamentoDokumen11 halamanDesbalanceamento Rotativo Vibrações IsolamentoCleison OliveiraBelum ada peringkat
- EMPRESA - 238 - 919033230NA-008 Rev2 PDFDokumen26 halamanEMPRESA - 238 - 919033230NA-008 Rev2 PDFEdson RamosBelum ada peringkat
- Apostila Msa PortuguêsDokumen28 halamanApostila Msa PortuguêsmsbarretosBelum ada peringkat
- 19 Excit Arbitr SemDokumen12 halaman19 Excit Arbitr SemALEX_INSPETORBelum ada peringkat
- 14 An Resp Temp Sist Prim OrdDokumen10 halaman14 An Resp Temp Sist Prim OrdALEX_INSPETORBelum ada peringkat
- 18 Resposta Excit Perio SemDokumen14 halaman18 Resposta Excit Perio SemGleice GermanoBelum ada peringkat
- 16 Resp Sist Excit HarmDokumen15 halaman16 Resp Sist Excit HarmYves GarnardBelum ada peringkat
- 20 Introd Sist ControleDokumen4 halaman20 Introd Sist ControleALEX_INSPETORBelum ada peringkat
- 11 Modelagem Mat Sist PneumDokumen12 halaman11 Modelagem Mat Sist PneumMaria PerezBelum ada peringkat
- 15 An Resp Livre Sist 2 OrdemDokumen12 halaman15 An Resp Livre Sist 2 OrdemRaphael CantanhedeBelum ada peringkat
- 13 Func TesteDokumen10 halaman13 Func TesteALEX_INSPETORBelum ada peringkat
- 05 Mod Mat Sist Mec Transl NewtonDokumen7 halaman05 Mod Mat Sist Mec Transl NewtonByanka TelesBelum ada peringkat
- 10 Mod Mat Sist HidrDokumen21 halaman10 Mod Mat Sist HidrALEX_INSPETORBelum ada peringkat
- 09 Mod Mat Sist EletromecDokumen7 halaman09 Mod Mat Sist EletromecAlyssonAlmeidaBelum ada peringkat
- 07 Mod Mat Sist Mec Hibr NewtonDokumen8 halaman07 Mod Mat Sist Mec Hibr NewtonshinaiderBelum ada peringkat
- 12 Modelagem Mat Sist TermDokumen12 halaman12 Modelagem Mat Sist TermRayson AraújoBelum ada peringkat
- 07 Mod Mat Sist Mec Hibr NewtonDokumen8 halaman07 Mod Mat Sist Mec Hibr NewtonshinaiderBelum ada peringkat
- 08 Mod Mat Sist EletDokumen12 halaman08 Mod Mat Sist EletPHXNEOBelum ada peringkat
- Apostila de Vibrações MecânicasDokumen22 halamanApostila de Vibrações MecânicasSávio Nunes da SilvaBelum ada peringkat
- 03 Repres Modelos Eq I O Func TransfDokumen7 halaman03 Repres Modelos Eq I O Func TransfALEX_INSPETORBelum ada peringkat
- 02 Repres Modelos Var EstadoDokumen11 halaman02 Repres Modelos Var EstadoPereiraBelum ada peringkat
- ESAB OK 1901102rev0 - ApostilaMetalurgiaSoldagemDokumen96 halamanESAB OK 1901102rev0 - ApostilaMetalurgiaSoldagemwsfranca100% (2)
- Bioestatística na FisioterapiaDokumen1 halamanBioestatística na FisioterapiaMabia RochaBelum ada peringkat
- Axé Music - Conheça A Origem Do Gênero MusicalDokumen3 halamanAxé Music - Conheça A Origem Do Gênero MusicalCarmen BenitezBelum ada peringkat
- Plano de Disciplina Lingua Portuguesa e Literatura Brasileira PDFDokumen4 halamanPlano de Disciplina Lingua Portuguesa e Literatura Brasileira PDFluizascBelum ada peringkat
- Prática da admiração constanteDokumen62 halamanPrática da admiração constanteSyl UrquietaBelum ada peringkat
- Fispq EasyfoamDokumen6 halamanFispq EasyfoamMichael CoxBelum ada peringkat
- Anatomia do Crâ nio e tó raxDokumen28 halamanAnatomia do Crâ nio e tó raxÉrica MartinezBelum ada peringkat
- Aprender Sempre 2 Professor Parte IIDokumen260 halamanAprender Sempre 2 Professor Parte IIIVONETE TAVARES RAMOSBelum ada peringkat
- Casos Cap. 6 SolucaoDokumen6 halamanCasos Cap. 6 SolucaoSebastião de CanavarroBelum ada peringkat
- LIA AgarDokumen2 halamanLIA AgarLincon SovinskiBelum ada peringkat
- CFW700 - HIR Adendo Ao Manual Do UsuárioDokumen2 halamanCFW700 - HIR Adendo Ao Manual Do Usuárioh-97225Belum ada peringkat
- Caderno 66 Tania StolzeDokumen8 halamanCaderno 66 Tania StolzeDiego RosaBelum ada peringkat
- Ccmei 48487346000192 PDFDokumen2 halamanCcmei 48487346000192 PDFPablo BrenoBelum ada peringkat
- Avaliação de Matemática do 6o ano do Ensino FundamentalDokumen8 halamanAvaliação de Matemática do 6o ano do Ensino FundamentalalexandroBelum ada peringkat
- 2.2 TEXTO - A Distribuição Da Temperatura em PortugalDokumen38 halaman2.2 TEXTO - A Distribuição Da Temperatura em PortugalHugo SantosBelum ada peringkat
- ANGOLA - Nação Dominada Por Uma Elite RicaDokumen32 halamanANGOLA - Nação Dominada Por Uma Elite RicaManuel Francisco Castanheta Pombal100% (1)
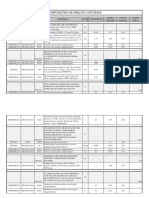
- Composicoes de PrecosDokumen3 halamanComposicoes de PrecosAtanasioBelum ada peringkat
- Caso clínico de paciente feminina com dispneia e tosse crônicaDokumen2 halamanCaso clínico de paciente feminina com dispneia e tosse crônicaEdilane Dos Santos MoreiraBelum ada peringkat
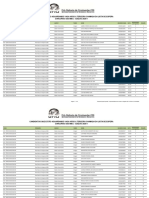
- Candidatos aguardando vaga em Ciências BiológicasDokumen412 halamanCandidatos aguardando vaga em Ciências BiológicasRafael SoaresBelum ada peringkat
- Manual Vias RodoviariasDokumen220 halamanManual Vias RodoviariasEgna Shakira UqueioBelum ada peringkat
- Aspirador GolfDokumen2 halamanAspirador GolfoliviogmBelum ada peringkat
- 19 - Lover UnveiledDokumen900 halaman19 - Lover UnveiledEconomize Agora100% (2)
- 3º ANO Práticas Corporais de Aventura - Mountain BikeDokumen25 halaman3º ANO Práticas Corporais de Aventura - Mountain BikeVitor FerreiraBelum ada peringkat
- Um Guia para Uma Consciência Superior - Equillíbrio Dos Chakras Com SolfeggioDokumen3 halamanUm Guia para Uma Consciência Superior - Equillíbrio Dos Chakras Com SolfeggioZigbi Aloha100% (1)
- Relés de ImpulsoDokumen2 halamanRelés de ImpulsolelasiaromBelum ada peringkat
- Guia básico desenho vilõesDokumen100 halamanGuia básico desenho vilõesVeronikaSantos75% (8)
- Classificação de agentes nocivosDokumen6 halamanClassificação de agentes nocivosAnonymous T1R768f6a100% (1)
- Programa de Doutoramento em Hist Oria: Mudan Ca e Continuidade Num Mundo GlobalDokumen533 halamanPrograma de Doutoramento em Hist Oria: Mudan Ca e Continuidade Num Mundo GlobalMaria Clara MendesBelum ada peringkat
- Avaliação de Ciências e MatemáticaDokumen9 halamanAvaliação de Ciências e MatemáticaYago SalesBelum ada peringkat
- Programa de Ação 2023 ProfessorDokumen7 halamanPrograma de Ação 2023 ProfessorEverton Silva100% (1)
- Ma Costeira D MocambiqueDokumen14 halamanMa Costeira D MocambiqueMulandiwakaKunene MudavanhuBelum ada peringkat