Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Certificate of Final Electrical Inspection - 0Dokumen3 halamanCertificate of Final Electrical Inspection - 0RM DulawanBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- System Analysis & Design: Structuring System Process RequirementsDokumen52 halamanSystem Analysis & Design: Structuring System Process RequirementsNusrat Jahan NafisaBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Assembly Drawing Tail Stock 2Dokumen12 halamanAssembly Drawing Tail Stock 2Syech Maulana Malik100% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Dil 1232Dokumen18 halamanDil 1232iman alyahBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Problem Solving Notes - Eliminating Possibilities NotesDokumen3 halamanProblem Solving Notes - Eliminating Possibilities NotesloisdanielleBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Sample of Reminder Collection LetterDokumen3 halamanSample of Reminder Collection LetterTu EniBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- FIGURE 1. Standard Input Protection NetworkDokumen3 halamanFIGURE 1. Standard Input Protection NetworkNilesh NarkhedeBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Appendix Selected Problems of Controllability and Observability of Linear SystemsDokumen31 halamanAppendix Selected Problems of Controllability and Observability of Linear SystemsNavdeep GoelBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Chapter 2 (Numerical) GarimaDokumen43 halamanChapter 2 (Numerical) GarimaSudeep magarBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Numerical Analysis: Prof. Dr. Süheyla ÇEHRELİDokumen15 halamanNumerical Analysis: Prof. Dr. Süheyla ÇEHRELİEzgi GeyikBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Serv NYC ProjectDokumen9 halamanServ NYC ProjectAnshu BaidyaBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
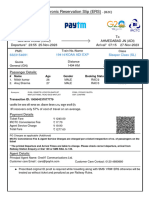
- Train TicketDokumen2 halamanTrain TicketSunil kumarBelum ada peringkat
- Chapter 2Dokumen63 halamanChapter 2Mohammad ja'farBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- AMMONIUM SULPHATE, TECHNICAL SpecificationDokumen10 halamanAMMONIUM SULPHATE, TECHNICAL Specificationbabji dudekulaBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Cognitive Dimension of EducationDokumen30 halamanCognitive Dimension of Educationjulius ochiengBelum ada peringkat
- Pre Basic and Basic TestDokumen9 halamanPre Basic and Basic TestkacelyBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Mastek Jul-Sep 2021Dokumen51 halamanMastek Jul-Sep 2021Aditya0% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1091)
- Difference Between Executor Exe ServiceDokumen4 halamanDifference Between Executor Exe ServiceMadura NattuduraiBelum ada peringkat
- STG Perkins 135kvaDokumen2 halamanSTG Perkins 135kvaromeo ramirez100% (1)
- Design Aeroleaf Wind Turbine PDFDokumen98 halamanDesign Aeroleaf Wind Turbine PDFananduBelum ada peringkat
- VMTC RAII Presentation PDFDokumen154 halamanVMTC RAII Presentation PDFDarwin Nacion ManquiquisBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Try These Funny Hindi Rhymes To Memorize That Tricky Periodic Table - KshitijDokumen12 halamanTry These Funny Hindi Rhymes To Memorize That Tricky Periodic Table - KshitijabhijeetBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- AutoSPRINK12InstallationWalkthrough PDFDokumen2 halamanAutoSPRINK12InstallationWalkthrough PDFHai PhamBelum ada peringkat
- Pmls2 Quiz QuestionsDokumen12 halamanPmls2 Quiz QuestionsrytorvasBelum ada peringkat
- Orgonium Orgone Energy ResearchDokumen37 halamanOrgonium Orgone Energy Researchlnln462ln100% (1)
- Presentation 5Dokumen18 halamanPresentation 5Hazel Halili100% (1)
- W21225760934 0 PDFDokumen2 halamanW21225760934 0 PDFAnonymous czHLQeLPB4Belum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Parallel and Distributed SystemsDokumen1 halamanParallel and Distributed SystemsNinad MadhabBelum ada peringkat
- Math in The Modern World SyllabusDokumen4 halamanMath in The Modern World SyllabusLeandro Amoranto BambeBelum ada peringkat
- Mensuration FormulasDokumen9 halamanMensuration FormulasVenki MvsBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)