Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Calypso Curve Instructors GuideDokumen6 halamanCalypso Curve Instructors GuideLuis CarlosBelum ada peringkat
- Calypso Curve Instructors GuideDokumen6 halamanCalypso Curve Instructors GuideLuis CarlosBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Overall Method StatementDokumen33 halamanOverall Method Statementsaranga100% (1)
- Fama Fraternitatis Rosae Crucis PDFDokumen2 halamanFama Fraternitatis Rosae Crucis PDFJudy50% (2)
- Master RunOut 56949 - 00 - 02 - 00 - 2 - CHRDokumen1 halamanMaster RunOut 56949 - 00 - 02 - 00 - 2 - CHRLeonardo MiguelBelum ada peringkat
- Master RunOut 56949 - 00 - 02 - 00 - 2 - HDRDokumen1 halamanMaster RunOut 56949 - 00 - 02 - 00 - 2 - HDRLeonardo MiguelBelum ada peringkat
- Apalpador em T - 0.6002ADokumen2 halamanApalpador em T - 0.6002ALeonardo MiguelBelum ada peringkat
- Master RunOut 56949 - 00 - 02 - 00 - 2 - CHRDokumen1 halamanMaster RunOut 56949 - 00 - 02 - 00 - 2 - CHRLeonardo MiguelBelum ada peringkat
- Calypso Measuring Result: Characteristic Actual Nominal Upper Tol Lower Tol DeviationDokumen3 halamanCalypso Measuring Result: Characteristic Actual Nominal Upper Tol Lower Tol DeviationLeonardo MiguelBelum ada peringkat
- Master Reference Mn2 A20 Z34 24.07.2020 14.33.40 1Dokumen2 halamanMaster Reference Mn2 A20 Z34 24.07.2020 14.33.40 1Leonardo MiguelBelum ada peringkat
- Calypso Measuring Result: Characteristic Actual Nominal Upper Tol Lower Tol DeviationDokumen3 halamanCalypso Measuring Result: Characteristic Actual Nominal Upper Tol Lower Tol DeviationLeonardo MiguelBelum ada peringkat
- Apalpador em T - 0.6002ADokumen2 halamanApalpador em T - 0.6002ALeonardo MiguelBelum ada peringkat
- Apalpador em T - 0.6002ADokumen2 halamanApalpador em T - 0.6002ALeonardo MiguelBelum ada peringkat
- Apalpador em T - 0.6002ADokumen2 halamanApalpador em T - 0.6002ALeonardo MiguelBelum ada peringkat
- Calypso Measuring Result: Characteristic Actual Nominal Upper Tol Lower Tol DeviationDokumen3 halamanCalypso Measuring Result: Characteristic Actual Nominal Upper Tol Lower Tol DeviationLeonardo MiguelBelum ada peringkat
- Apalpador em T - 0.6002ADokumen2 halamanApalpador em T - 0.6002ALeonardo MiguelBelum ada peringkat
- Apalpador em T - 0.6002ADokumen2 halamanApalpador em T - 0.6002ALeonardo MiguelBelum ada peringkat
- Apalpador em T - 0.6002ADokumen2 halamanApalpador em T - 0.6002ALeonardo MiguelBelum ada peringkat
- GON HintsDokumen2 halamanGON HintsLeonardo MiguelBelum ada peringkat
- IMT Catalog Standard GraticulesDokumen16 halamanIMT Catalog Standard GraticulesLeonardo MiguelBelum ada peringkat
- CMM PDFDokumen99 halamanCMM PDFcesar_abdd100% (2)
- ConturoMatic CV250 EDokumen4 halamanConturoMatic CV250 ELeonardo Miguel100% (1)
- Intumescent Paint For Steel NZ - Coating - Co.nzDokumen8 halamanIntumescent Paint For Steel NZ - Coating - Co.nzPeter ThomsonBelum ada peringkat
- Typical Section SC 10: Kerajaan MalaysiaDokumen1 halamanTypical Section SC 10: Kerajaan MalaysiaAisyah Atiqah KhalidBelum ada peringkat
- Intro Slow Keyofg: Em7 G5 A7Sus4 G C/G D/F# AmDokumen2 halamanIntro Slow Keyofg: Em7 G5 A7Sus4 G C/G D/F# Ammlefev100% (1)
- The Unofficial Aterlife GuideDokumen33 halamanThe Unofficial Aterlife GuideIsrael Teixeira de AndradeBelum ada peringkat
- Of The Month Is Live. 100+ Subjects. Participate Now!: Sanfoundry Certification ContestDokumen4 halamanOf The Month Is Live. 100+ Subjects. Participate Now!: Sanfoundry Certification ContestBaydaa QaidyBelum ada peringkat
- Southwest Airlines Final ReportDokumen16 halamanSouthwest Airlines Final Reportapi-427311067Belum ada peringkat
- Project Title Discipline Project Stage Client Attendance CirculationDokumen4 halamanProject Title Discipline Project Stage Client Attendance CirculationgregBelum ada peringkat
- Marvell 88F37xx Product Brief 20160830Dokumen2 halamanMarvell 88F37xx Product Brief 20160830Sassy FiverBelum ada peringkat
- Bahir Dar University BIT: Faculity of Mechanical and Industrial EngineeringDokumen13 halamanBahir Dar University BIT: Faculity of Mechanical and Industrial Engineeringfraol girmaBelum ada peringkat
- VTA28-G5: Fuel OptimizedDokumen3 halamanVTA28-G5: Fuel OptimizedIslam HemdanBelum ada peringkat
- Iron Ore ProcessDokumen52 halamanIron Ore Processjafary448067% (3)
- Industrial Internet of Things: Presented To-Presented byDokumen18 halamanIndustrial Internet of Things: Presented To-Presented byGaurav RaturiBelum ada peringkat
- Sketchup-Rhino Cheat SheetDokumen1 halamanSketchup-Rhino Cheat Sheetxanext7Belum ada peringkat
- Datasheet Ark XH Battery System EngDokumen2 halamanDatasheet Ark XH Battery System EngLisa CowenBelum ada peringkat
- Reactive Dyes For Digital Textile Printing InksDokumen4 halamanReactive Dyes For Digital Textile Printing InksDHRUVBelum ada peringkat
- Nicholas Hudson - From Nation To Race: The Origin of Racial Classification in Eighteenth-CenturyDokumen19 halamanNicholas Hudson - From Nation To Race: The Origin of Racial Classification in Eighteenth-CenturyPedro IIBelum ada peringkat
- Milviz F-15e Poh V 2Dokumen499 halamanMilviz F-15e Poh V 2Jose Ramon Martinez GutierrezBelum ada peringkat
- 3161 GIS Data ModelsDokumen13 halaman3161 GIS Data Modelsapi-3788255Belum ada peringkat
- Biologically Active Compounds From Hops and Prospects For Their Use - Karabín 2016Dokumen26 halamanBiologically Active Compounds From Hops and Prospects For Their Use - Karabín 2016Micheli Legemann MonteBelum ada peringkat
- SPM 1449 2006 Mathematics p2 BerjawapanDokumen18 halamanSPM 1449 2006 Mathematics p2 Berjawapanpss smk selandar71% (7)
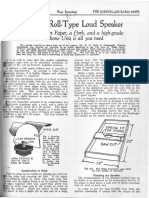
- Simple Roll-Type: A Loud SpeakerDokumen1 halamanSimple Roll-Type: A Loud SpeakerEudes SilvaBelum ada peringkat
- Sample Dilapidation ReportDokumen8 halamanSample Dilapidation ReportczarusBelum ada peringkat
- Manual Nice9000v A04Dokumen151 halamanManual Nice9000v A04hoang tamBelum ada peringkat
- Crashing Is A Schedule Compression Technique Used To Reduce or Shorten The Project ScheduleDokumen1 halamanCrashing Is A Schedule Compression Technique Used To Reduce or Shorten The Project ScheduleRaymart BulagsacBelum ada peringkat
- 1986 EMT Disruption of Microbial Cells For Intracellular ProductsDokumen11 halaman1986 EMT Disruption of Microbial Cells For Intracellular ProductsLezid CortesBelum ada peringkat
- RhythmDokumen10 halamanRhythmSalcedo NoelBelum ada peringkat
- Leadership Games and ActivitiesDokumen38 halamanLeadership Games and ActivitiesWilliam Oliss100% (1)
- Adaptive Cruise ControlDokumen5 halamanAdaptive Cruise ControlIJIRSTBelum ada peringkat