Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- SSC JE Result Notice 2016Dokumen2 halamanSSC JE Result Notice 2016Kabya Srivastava100% (1)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- 8051 ExplainedDokumen16 halaman8051 ExplainedApurva DesaiBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Gate Mathematics: MAI) 4SDokumen258 halamanGate Mathematics: MAI) 4SManivannan VadiveluBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- NetMarks C 19122017Dokumen132 halamanNetMarks C 19122017Manish SharmaBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- 8085 Microprocessor Opcode TableDokumen6 halaman8085 Microprocessor Opcode TableSagnik Gangopadhyay67% (3)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Novak DjokovicDokumen12 halamanNovak DjokovicSayan Kumar Khan100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Operating System GATE NotesDokumen176 halamanOperating System GATE NotesVicky TiwariBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- SSC JE Result Notice 2016Dokumen2 halamanSSC JE Result Notice 2016Kabya Srivastava100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- View - Print Submitted Form PDFDokumen2 halamanView - Print Submitted Form PDFRAHUL KUMARBelum ada peringkat
- Compiler Hand Written Notes Made EasyDokumen127 halamanCompiler Hand Written Notes Made EasyArpkeet IJBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- DurgaSoft SCJP Notes Part 1 - JavabynataraJ PDFDokumen255 halamanDurgaSoft SCJP Notes Part 1 - JavabynataraJ PDFSiva Sai Charan KondapiBelum ada peringkat
- MP QBDokumen19 halamanMP QBRaji SharmiBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Ju Ug Placement Records 2019-20Dokumen2 halamanJu Ug Placement Records 2019-20Sayan Kumar KhanBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Hibernate - Natraj - SatyaDokumen262 halamanHibernate - Natraj - SatyaMichael J GeorgeBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Java Applet BasicsDokumen10 halamanJava Applet BasicsrednriBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- MicrocontrollerDokumen414 halamanMicrocontrollerSayan Kumar KhanBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Paper 15Dokumen26 halamanPaper 15Sayan Kumar KhanBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- MicroProcessor & Computer OrganisationDokumen74 halamanMicroProcessor & Computer OrganisationAnubhab BanerjeeBelum ada peringkat
- Paper 13Dokumen22 halamanPaper 13Sayan Kumar KhanBelum ada peringkat
- Micro Notes 2-1Dokumen11 halamanMicro Notes 2-1Sayan Kumar KhanBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Micro NotesDokumen24 halamanMicro NotesSayan Kumar KhanBelum ada peringkat
- Paper 16Dokumen28 halamanPaper 16Sayan Kumar KhanBelum ada peringkat
- 29 QusDokumen16 halaman29 QusAsafAhmadBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Fiitjee: JEE (Advanced), 2015Dokumen24 halamanFiitjee: JEE (Advanced), 2015Sayan Kumar KhanBelum ada peringkat
- 33 QusDokumen15 halaman33 QusAsafAhmadBelum ada peringkat
- Paper 9Dokumen20 halamanPaper 9Sayan Kumar KhanBelum ada peringkat
- Paper 7Dokumen22 halamanPaper 7Sayan Kumar KhanBelum ada peringkat
- Paper 8Dokumen23 halamanPaper 8Sayan Kumar KhanBelum ada peringkat
- Paper 6Dokumen20 halamanPaper 6Sayan Kumar KhanBelum ada peringkat
- Aircraft Maintanence Engg Book 9A TypeDokumen139 halamanAircraft Maintanence Engg Book 9A TypeimmortalforeverBelum ada peringkat
- Hole Cleaning PDFDokumen68 halamanHole Cleaning PDFHarold AldayBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- CONSTRUCTION OF INTERNAL ROADS & INFRASTRUCTURE WORKS FOR SECTOR EAST 25, PHASE 2, ABU DHABI - DELAY EVENT IMPACT CALCULATIONSDokumen10 halamanCONSTRUCTION OF INTERNAL ROADS & INFRASTRUCTURE WORKS FOR SECTOR EAST 25, PHASE 2, ABU DHABI - DELAY EVENT IMPACT CALCULATIONS143Belum ada peringkat
- Gfps System Specification PVC C Metric en PDFDokumen24 halamanGfps System Specification PVC C Metric en PDFMohammed sabatinBelum ada peringkat
- Physics Roller Coaster ProjectDokumen13 halamanPhysics Roller Coaster Projectapi-348624957Belum ada peringkat
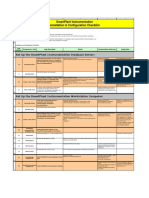
- SmartPlant Instrumentation installation checklistDokumen2 halamanSmartPlant Instrumentation installation checklistmnoormohamed82Belum ada peringkat
- FREE UX Books @UXlinksDokumen4 halamanFREE UX Books @UXlinksSyaifudin MashuriBelum ada peringkat
- 4-way switch wiring diagram for a 2 pickup guitarDokumen1 halaman4-way switch wiring diagram for a 2 pickup guitarNebojša JoksimovićBelum ada peringkat
- Acp 400020180910102625Dokumen2 halamanAcp 400020180910102625Sofyan Andika YusufBelum ada peringkat
- Manufacturing Technology (ME461) Lecture1Dokumen39 halamanManufacturing Technology (ME461) Lecture1Rishabh JainBelum ada peringkat
- Slabs Are Plate Elements Forming Floors andDokumen5 halamanSlabs Are Plate Elements Forming Floors andyasas89Belum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- AcrSavoniacJ ZDokumen454 halamanAcrSavoniacJ ZЕвгенияBelum ada peringkat
- FloEFD For Creo InstallDokumen18 halamanFloEFD For Creo InstallDarko MarjanovicBelum ada peringkat
- SAP-Press - Abap Development For Sap HanaDokumen30 halamanSAP-Press - Abap Development For Sap HananicocastanioBelum ada peringkat
- Environmental Science Course Project-1Dokumen27 halamanEnvironmental Science Course Project-1vaishnaviBelum ada peringkat
- 8 Bit Invaders RulesDokumen4 halaman8 Bit Invaders RulesRollo MirfinoBelum ada peringkat
- Dwg. No. 63170016 - ER-15Dokumen1 halamanDwg. No. 63170016 - ER-15GiantcanaBelum ada peringkat
- DYNAenergetics 2.875 PA Auto-Vent Firing Head Field Assembly ProcedureDokumen7 halamanDYNAenergetics 2.875 PA Auto-Vent Firing Head Field Assembly ProceduremahsaBelum ada peringkat
- KANSAS CITY Hyatt Regency Hotel Walkways CollapseDokumen8 halamanKANSAS CITY Hyatt Regency Hotel Walkways CollapseRafran RoslyBelum ada peringkat
- Project Management Book PDFDokumen55 halamanProject Management Book PDFSerigne Mbaye Diop94% (16)
- Cisco CCIE CCNP RS Study Flashcards Ver 49Dokumen102 halamanCisco CCIE CCNP RS Study Flashcards Ver 49niboozBelum ada peringkat
- The Contemporary WorldDokumen9 halamanThe Contemporary WorldDennis RaymundoBelum ada peringkat
- Export Promotion Councils - Final UpdatedDokumen14 halamanExport Promotion Councils - Final UpdatedUtkarsh SaxenaBelum ada peringkat
- Eaton 9130 Rack 700-3000vaDokumen4 halamanEaton 9130 Rack 700-3000vaJose Luis PintoBelum ada peringkat
- Why I Play Bass March 14 2013Dokumen293 halamanWhy I Play Bass March 14 2013Paul van Niekerk80% (5)
- 194 Sample ChapterDokumen27 halaman194 Sample ChapterVikas TiwariBelum ada peringkat
- 2008-07-31 074935 04 CelicaDokumen10 halaman2008-07-31 074935 04 CelicaCesar Alarcón Solis100% (1)
- Datasheet - SP 275K INH String InvDokumen1 halamanDatasheet - SP 275K INH String Invsharib26Belum ada peringkat
- Sat - RPMSDokumen4 halamanSat - RPMSAeroz RednaxelaBelum ada peringkat
- DT Progression Pathways ks3 Textiles Y9Dokumen1 halamanDT Progression Pathways ks3 Textiles Y9api-240012980Belum ada peringkat