Anda mungkin juga menyukai
- Tte 0913Dokumen76 halamanTte 0913Deepak Chachra75% (4)
- Automatic Transmission Basics PDFDokumen34 halamanAutomatic Transmission Basics PDFtambache69100% (1)
- Calculating Motor Start TimeDokumen8 halamanCalculating Motor Start TimeRaj SekharBelum ada peringkat
- Variable Capacity Torque ConverterDokumen3 halamanVariable Capacity Torque ConverterSyahrul Edi LatiefBelum ada peringkat
- W561 001xeDokumen79 halamanW561 001xemliugong100% (5)
- Calculation of Induction Motor Starting Parameters Using MatlabDokumen6 halamanCalculation of Induction Motor Starting Parameters Using MatlabДејан ПејовскиBelum ada peringkat
- Energy Management Strategy For A Hybrid Electric VehicleDokumen10 halamanEnergy Management Strategy For A Hybrid Electric VehicleJuan Pablo Chamorro AguadoBelum ada peringkat
- AC Motor ProtectionDokumen33 halamanAC Motor ProtectionLoretta KimBelum ada peringkat
- Fluid Coupling (Scoop Type) PST - Rating - SelectionDokumen2 halamanFluid Coupling (Scoop Type) PST - Rating - Selectionpravash2526100% (1)
- Structure & Work Principle of Torque ConverterDokumen52 halamanStructure & Work Principle of Torque ConverterEdy ChandraBelum ada peringkat
- Voith Turbo - BasicsDokumen49 halamanVoith Turbo - Basicssenthil031277100% (1)
- Installation and Operating Manual: T Turbo Coupling With Constant FillDokumen154 halamanInstallation and Operating Manual: T Turbo Coupling With Constant Fillpk cfctkBelum ada peringkat
- Airbus Application of Topology Sizing and Shape Optimization MethodsDokumen12 halamanAirbus Application of Topology Sizing and Shape Optimization MethodsDeepak ChachraBelum ada peringkat
- Beltconveyordesign Dunlop 140630061205 Phpapp02Dokumen161 halamanBeltconveyordesign Dunlop 140630061205 Phpapp02Ariskal PutraBelum ada peringkat
- Fluid Coupling NotesDokumen20 halamanFluid Coupling NotesSagar PatilBelum ada peringkat
- Motor Sizing CalculationDokumen3 halamanMotor Sizing CalculationRizwan TahirBelum ada peringkat
- Torque ConvertersDokumen35 halamanTorque ConvertersDinesh Kumar MaliBelum ada peringkat
- Study of a reluctance magnetic gearbox for energy storage system applicationDari EverandStudy of a reluctance magnetic gearbox for energy storage system applicationPenilaian: 1 dari 5 bintang1/5 (1)
- Medium Voltage Motor StartingDokumen3 halamanMedium Voltage Motor StartingharmlesdragonBelum ada peringkat
- Technical Specification - Conveyor SystemDokumen38 halamanTechnical Specification - Conveyor SystemTeguh Yuliardi Putra100% (1)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDari EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlPenilaian: 5 dari 5 bintang5/5 (1)
- ANSYS Meshing 12.0Dokumen98 halamanANSYS Meshing 12.0Qiang Liu100% (2)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetDari EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetPenilaian: 2 dari 5 bintang2/5 (1)
- The Basic Motion ControlDokumen3 halamanThe Basic Motion ControlEdgar David UribeBelum ada peringkat
- Thermal Overload Motor Relay ProtectionDokumen7 halamanThermal Overload Motor Relay ProtectionPierre Enrique Carrasco FuentesBelum ada peringkat
- Torque ConvertersDokumen27 halamanTorque Convertersz2ali0% (1)
- Electrical Technology-Load EqualizationDokumen6 halamanElectrical Technology-Load EqualizationAnoop Mathew100% (1)
- The Induction Motor: A Detailed Look at Its Operation and CharacteristicsDokumen13 halamanThe Induction Motor: A Detailed Look at Its Operation and CharacteristicsAsimBelum ada peringkat
- AC Machines Lab. Experiment No.2: University Electronics Engineering College Systems and Control DepDokumen6 halamanAC Machines Lab. Experiment No.2: University Electronics Engineering College Systems and Control DepQusai JamalBelum ada peringkat
- DTrends Feb 2011Dokumen14 halamanDTrends Feb 2011Rui AllenBelum ada peringkat
- Rho3 Section5 Application GuideDokumen8 halamanRho3 Section5 Application Guidertsr1990Belum ada peringkat
- Power Electronics and Elec Drive New1 For Power and Control StreamDokumen176 halamanPower Electronics and Elec Drive New1 For Power and Control StreamBacha NegeriBelum ada peringkat
- Dr. Ali Abdul Razzaq ALTAHIR: Lecture 6: Third ClassDokumen20 halamanDr. Ali Abdul Razzaq ALTAHIR: Lecture 6: Third ClassAli Altahir100% (1)
- Load EqualisationDokumen4 halamanLoad EqualisationLaxmikant BagaleBelum ada peringkat
- Selection of Servo Motors and Drives: Dal Y. Ohm, Drivetech, IncDokumen8 halamanSelection of Servo Motors and Drives: Dal Y. Ohm, Drivetech, IncInderpreet SinghBelum ada peringkat
- Flywheel Smoothens Non-Uniform TorqueDokumen14 halamanFlywheel Smoothens Non-Uniform Torquepixelo09Belum ada peringkat
- Utilization of Electrical Energy: Chapter 2: Electric Drives L-2-3Dokumen21 halamanUtilization of Electrical Energy: Chapter 2: Electric Drives L-2-3Frozen BoyBelum ada peringkat
- The Basics of Motion Control-Part 2Dokumen3 halamanThe Basics of Motion Control-Part 2abduhalimBelum ada peringkat
- Direct Online StarterDokumen17 halamanDirect Online Starterදුප්පත් කොල්ලාBelum ada peringkat
- 4.6 Selection - of - Crane - Duty - Motors - Part - 3Dokumen4 halaman4.6 Selection - of - Crane - Duty - Motors - Part - 3Edison EstrellaBelum ada peringkat
- Calculation of motor starting time as first approximation | EEPDokumen18 halamanCalculation of motor starting time as first approximation | EEPamine benlasriBelum ada peringkat
- Aero First Principles Modeling Workbook (Student)Dokumen6 halamanAero First Principles Modeling Workbook (Student)Hakim BelamiriBelum ada peringkat
- Energy Conversion 17Dokumen10 halamanEnergy Conversion 17krishnareddy_chintalaBelum ada peringkat
- Sizing Servo Systems for Motion ProfilesDokumen3 halamanSizing Servo Systems for Motion ProfilesMaman FirmansyahBelum ada peringkat
- Starting induction motors efficientlyDokumen25 halamanStarting induction motors efficientlyMonika VaitulionytėBelum ada peringkat
- ELE 2117 Lesson 11Dokumen42 halamanELE 2117 Lesson 11elioBelum ada peringkat
- 2equivalent Drive Parameters-2Dokumen11 halaman2equivalent Drive Parameters-2Senpai TashiBelum ada peringkat
- Introduction To Motor DrivesDokumen24 halamanIntroduction To Motor Drivessukhbat sodnomdorjBelum ada peringkat
- ColchaI Starting MethodsDokumen8 halamanColchaI Starting Methodsivancho04mBelum ada peringkat
- Energy Conversion 17Dokumen10 halamanEnergy Conversion 17protectionworkBelum ada peringkat
- INDUCTION MOTOR TORQUE-SPEED CURVEDokumen10 halamanINDUCTION MOTOR TORQUE-SPEED CURVEprasad243243Belum ada peringkat
- Cap 1Dokumen18 halamanCap 1Ali Hussien0% (1)
- Experiment 2: A Model Energy Conversion System: Operation and Analysis of A Stirling EngineDokumen11 halamanExperiment 2: A Model Energy Conversion System: Operation and Analysis of A Stirling Enginetimur_okBelum ada peringkat
- Electrical Machines Questions and Answers GuideDokumen56 halamanElectrical Machines Questions and Answers GuideGanesh KumarBelum ada peringkat
- R6134E Setting Guide OPNDokumen5 halamanR6134E Setting Guide OPNrajinipre-1Belum ada peringkat
- Lab 09 - Synchronous MotorgDokumen8 halamanLab 09 - Synchronous Motorgdev2191Belum ada peringkat
- Solid State Drives Short BookDokumen25 halamanSolid State Drives Short BookGomathi Raja MBelum ada peringkat
- Hydro Mechanicaltransmissions Tmms10Dokumen10 halamanHydro Mechanicaltransmissions Tmms10Arun Raj KhannaBelum ada peringkat
- Starting of Three-Phase Induction Motor (1/Ch. 35)Dokumen10 halamanStarting of Three-Phase Induction Motor (1/Ch. 35)Akib AhmedBelum ada peringkat
- Retardation TestDokumen5 halamanRetardation TestAnkit Shetty100% (1)
- Duties of Induction MotorsDokumen20 halamanDuties of Induction MotorsIee XpBelum ada peringkat
- EE 1352 Monograph UnitVDokumen19 halamanEE 1352 Monograph UnitVafzalbaigsa100% (2)
- Torque Density of PM MotorsDokumen7 halamanTorque Density of PM MotorsDantam RaoBelum ada peringkat
- CONTROL OF INDUCTION MOTORS FOR TRACTION SYSTEMSDokumen9 halamanCONTROL OF INDUCTION MOTORS FOR TRACTION SYSTEMSLaurence MichaelBelum ada peringkat
- Torque-Slip Characteristics of Induction Motors ExplainedDokumen17 halamanTorque-Slip Characteristics of Induction Motors Explainedvoltax1Belum ada peringkat
- IMNPE 66 1 2012 Firago VasilyevDokumen11 halamanIMNPE 66 1 2012 Firago Vasilyev7amdan S90Belum ada peringkat
- Unit-4-Electrical Machines: Lecture-3 Starting methods of 3-Φ Induction MotorDokumen13 halamanUnit-4-Electrical Machines: Lecture-3 Starting methods of 3-Φ Induction MotorPratik SarkarBelum ada peringkat
- Lec4 Polyphase Induction Motor IIDokumen14 halamanLec4 Polyphase Induction Motor IIMohammed Dyhia AliBelum ada peringkat
- ProjectControl, DC. AnalysisDokumen15 halamanProjectControl, DC. AnalysisFir Dauss100% (1)
- Torque Speed CurveDokumen4 halamanTorque Speed CurveEfosa ImafidonBelum ada peringkat
- Two PH IM Old 2004Dokumen9 halamanTwo PH IM Old 2004srilakshmisiriBelum ada peringkat
- IAT-I Question Paper With Solution of 17EE82 Industrial Drives and Applications May-2021-Geetanjali PDokumen13 halamanIAT-I Question Paper With Solution of 17EE82 Industrial Drives and Applications May-2021-Geetanjali PTej RockersBelum ada peringkat
- Motor Protection Voltage UnbalanceDokumen7 halamanMotor Protection Voltage UnbalancehaamadhBelum ada peringkat
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesDari EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesBelum ada peringkat
- Wise M Ney: Run For India'S Win!Dokumen20 halamanWise M Ney: Run For India'S Win!Deepak ChachraBelum ada peringkat
- 06design ShaftsDokumen4 halaman06design ShaftsDeepak ChachraBelum ada peringkat
- Diwali Stock Picks 2016 IDBI CapitalDokumen12 halamanDiwali Stock Picks 2016 IDBI CapitalDeepak ChachraBelum ada peringkat
- GlossaryDokumen1 halamanGlossaryDeepak ChachraBelum ada peringkat
- Stress, Strength and Safety: Try AnalyseDokumen8 halamanStress, Strength and Safety: Try AnalyseDeepak Chachra100% (1)
- Design and Fabricate Transmission Linkage for Rear-Engine Off-Road BuggyDokumen35 halamanDesign and Fabricate Transmission Linkage for Rear-Engine Off-Road BuggyDeepak ChachraBelum ada peringkat
- Kinematic and Power Flow Analysis of BevDokumen16 halamanKinematic and Power Flow Analysis of BevDeepak ChachraBelum ada peringkat
- Finger Dislocation ExercisesDokumen6 halamanFinger Dislocation ExercisesDeepak ChachraBelum ada peringkat
- Evaluation of Hybrid ArchitecturesDokumen13 halamanEvaluation of Hybrid ArchitecturesDeepak ChachraBelum ada peringkat
- CTI Symposium Automotive TransmissionsDokumen2 halamanCTI Symposium Automotive TransmissionsDeepak ChachraBelum ada peringkat
- 36application of Fatigue TheoryDokumen7 halaman36application of Fatigue TheoryDeepak ChachraBelum ada peringkat
- Berlin 2A BookingDokumen3 halamanBerlin 2A BookingDeepak ChachraBelum ada peringkat
- 01load and Motor CharacteristicsDokumen7 halaman01load and Motor CharacteristicsDeepak ChachraBelum ada peringkat
- DC MotorEnglishDokumen10 halamanDC MotorEnglishVikaas JainBelum ada peringkat
- Hemo DynamicsDokumen2 halamanHemo DynamicsDeepak ChachraBelum ada peringkat
- Knowledge Base: Education & T RainingDokumen1 halamanKnowledge Base: Education & T RainingDeepak ChachraBelum ada peringkat
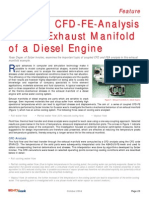
- Exhaust ManifoldDokumen5 halamanExhaust ManifoldDeepak Chachra100% (1)
- Stress Resolution: Principal OrientationDokumen5 halamanStress Resolution: Principal OrientationDeepak ChachraBelum ada peringkat
- Nafemsseminar AutomotiveDokumen1 halamanNafemsseminar AutomotiveDeepak ChachraBelum ada peringkat
- Acoustic Matrix MethodsDokumen5 halamanAcoustic Matrix MethodsDeepak ChachraBelum ada peringkat
- Confessions of T Wo Non-R Egister Ed AnalystsDokumen4 halamanConfessions of T Wo Non-R Egister Ed AnalystsDeepak ChachraBelum ada peringkat
- Mechano BiologicalDokumen4 halamanMechano BiologicalDeepak ChachraBelum ada peringkat
- Earthquake RockingDokumen4 halamanEarthquake RockingDeepak ChachraBelum ada peringkat
- Introduction To LifingDokumen50 halamanIntroduction To LifingDeepak ChachraBelum ada peringkat
- PD Case Study AirbusDokumen1 halamanPD Case Study AirbusDeepak ChachraBelum ada peringkat
- 2Dokumen9 halaman2stathiss11Belum ada peringkat
- HYVA-Crane-2013 High Res AttachmentDokumen53 halamanHYVA-Crane-2013 High Res AttachmentBalaji RathinavelBelum ada peringkat
- Assignment Questions ME603 (A) TurbomachineryDokumen21 halamanAssignment Questions ME603 (A) Turbomachineryगौरव साहूBelum ada peringkat
- Ratlam Diesel Shed Training ReportDokumen29 halamanRatlam Diesel Shed Training Reporter_manojpanchal100% (3)
- Prezentare Cuplaje FlenderDokumen20 halamanPrezentare Cuplaje FlenderMitrache Mugur NeluBelum ada peringkat
- Voith Turbocouplings OkDokumen10 halamanVoith Turbocouplings OkCalandrasReyCalandrasreyBelum ada peringkat
- User Manual PDFDokumen32 halamanUser Manual PDFRodrigo MesaBelum ada peringkat
- QP PVL 2006Dokumen45 halamanQP PVL 2006sudhakarmnBelum ada peringkat
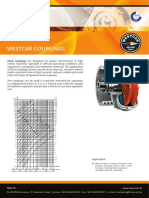
- Catalogue Card of Westcar CouplingsDokumen4 halamanCatalogue Card of Westcar CouplingsBgd FadliBelum ada peringkat
- Discharge and spillage conveyor drives for gold mining operationDokumen2 halamanDischarge and spillage conveyor drives for gold mining operationHernando SalamancaBelum ada peringkat
- AutomobileDokumen33 halamanAutomobilemarinerajesh3022Belum ada peringkat
- Type SCR 25W Sizes 18 To 52 - Eng PDFDokumen2 halamanType SCR 25W Sizes 18 To 52 - Eng PDFShyam J VyasBelum ada peringkat
- Fluid CouplingsDokumen52 halamanFluid Couplingsvikubhardwaj9224Belum ada peringkat
- Fluid Couplings PDFDokumen20 halamanFluid Couplings PDFmakanakiliBelum ada peringkat
- Vishnu Chaudhary HydraulicsDokumen17 halamanVishnu Chaudhary Hydraulicsvishnu chaudharyBelum ada peringkat
- Type AFC Sizes 46 To 80 - EngDokumen2 halamanType AFC Sizes 46 To 80 - EngShyam J VyasBelum ada peringkat
- Fluidomat Limited - FAQ'sDokumen7 halamanFluidomat Limited - FAQ'spramodtryBelum ada peringkat
- Automotive Transmission QuestionsDokumen8 halamanAutomotive Transmission QuestionsSahayaraj GabrielBelum ada peringkat
- Convertidor de par y toma de fuerza funcionamientoDokumen19 halamanConvertidor de par y toma de fuerza funcionamientoDimitri IanBelum ada peringkat