Anda mungkin juga menyukai
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Belum ada peringkat
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Dari EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Penilaian: 2.5 dari 5 bintang2.5/5 (3)
- Fta TutorialDokumen21 halamanFta Tutorialpj_chaudhary3796Belum ada peringkat
- R450 AVR Manual From Macfarlane Generators PDFDokumen20 halamanR450 AVR Manual From Macfarlane Generators PDFAnonymous 3RS6JNcBelum ada peringkat
- 300B Parallel SET AmplifierDokumen8 halaman300B Parallel SET Amplifierandree wBelum ada peringkat
- DiDokumen5 halamanDiTao Quang BinhBelum ada peringkat
- Electrical Commissioning EngineerDokumen3 halamanElectrical Commissioning EngineerEngr Irfan AkhtarBelum ada peringkat
- KAMAX - Bolt and Screw CompendiumDokumen60 halamanKAMAX - Bolt and Screw Compendiumjzaw65Belum ada peringkat
- 2021 - Power System Stability Issues & Classifications and Research Prospects in The Context of High-Penetration of Renewables and Power ElectronicsDokumen16 halaman2021 - Power System Stability Issues & Classifications and Research Prospects in The Context of High-Penetration of Renewables and Power ElectronicsJULIÁN ESTIBEN MESA CALLEBelum ada peringkat
- SN 65 HVD 230Dokumen33 halamanSN 65 HVD 230correudebassuraBelum ada peringkat
- CANDokumen9 halamanCANOscar AlizaresBelum ada peringkat
- SN74CBTS16211 24-Bit Fet Bus Switch With Schottky Diode ClampingDokumen11 halamanSN74CBTS16211 24-Bit Fet Bus Switch With Schottky Diode ClampingBa DuyBelum ada peringkat
- 7LB176Dokumen22 halaman7LB176Michael LiuBelum ada peringkat
- Microchip TC962 DatasheetDokumen13 halamanMicrochip TC962 DatasheetCale McColloughBelum ada peringkat
- Ci MonoestableDokumen13 halamanCi MonoestableGary DiazBelum ada peringkat
- Max 3223Dokumen12 halamanMax 3223higor_goBelum ada peringkat
- SN751178NDokumen16 halamanSN751178Nuser1ilaBelum ada peringkat
- L293 Quadruple Half-H Driver: Description Logic SymbolDokumen5 halamanL293 Quadruple Half-H Driver: Description Logic SymbolSiddhant YadavBelum ada peringkat
- HV9971Dokumen10 halamanHV9971Jazmin JorgeBelum ada peringkat
- 7805 Regulator DescriptionDokumen4 halaman7805 Regulator DescriptionyeateshwarriorBelum ada peringkat
- Cost-Effective, 2A Sink/Source Bus Termination Regulator: General Description FeaturesDokumen13 halamanCost-Effective, 2A Sink/Source Bus Termination Regulator: General Description FeaturesMostapha BenaliBelum ada peringkat
- AM26C32CDokumen17 halamanAM26C32Cvanhuong87Belum ada peringkat
- Data SheetDokumen14 halamanData Sheetcatsoithahuong84Belum ada peringkat
- D D D D D D D: Description/ordering InformationDokumen17 halamanD D D D D D D: Description/ordering InformationYugi Abdul LathifBelum ada peringkat
- SN 75175Dokumen19 halamanSN 75175fpinzi8627Belum ada peringkat
- DatasheetDokumen19 halamanDatasheetSwapnica GarreBelum ada peringkat
- D D D D D D: SN74LVC244A Octal Buffer/Driver With 3-State OutputsDokumen6 halamanD D D D D D: SN74LVC244A Octal Buffer/Driver With 3-State OutputsAhmad JamilBelum ada peringkat
- D D D D D D D D D: Description/ordering InformationDokumen18 halamanD D D D D D D D D: Description/ordering InformationJayson SarionBelum ada peringkat
- D D D D D D D D D: Description/ordering InformationDokumen17 halamanD D D D D D D D D: Description/ordering InformationStephanny Muñoz CotrinaBelum ada peringkat
- D D D D D D D D D: Description/ordering InformationDokumen18 halamanD D D D D D D D D: Description/ordering InformationMauricio BarriosBelum ada peringkat
- Fan 7392NDokumen18 halamanFan 7392NKhaleel MohammadBelum ada peringkat
- HC14Dokumen10 halamanHC14Bruno NascimentoBelum ada peringkat
- Ca3130, Ca3130aDokumen17 halamanCa3130, Ca3130aproctepBelum ada peringkat
- Ad 7524Dokumen8 halamanAd 7524Giovanny ContrerasBelum ada peringkat
- Low Power, 3.3 V, RS-232 Line Drivers/Receivers: F Charge Pump CapacitorsDokumen9 halamanLow Power, 3.3 V, RS-232 Line Drivers/Receivers: F Charge Pump Capacitorsdarkinvader2099Belum ada peringkat
- D D D D D D D D D: Description/ordering InformationDokumen19 halamanD D D D D D D D D: Description/ordering Informationarunan55Belum ada peringkat
- D D D D D D D D D: Description/ordering InformationDokumen17 halamanD D D D D D D D D: Description/ordering InformationFarraziBelum ada peringkat
- HS-2420RH - Fast Sample and HolDokumen8 halamanHS-2420RH - Fast Sample and HolDeepa DevarajBelum ada peringkat
- D D D D D D D D D D: Description/ordering InformationDokumen21 halamanD D D D D D D D D D: Description/ordering InformationGonzalo Dario Lema GarabañoBelum ada peringkat
- U708Dokumen28 halamanU708Sol De GabrielBelum ada peringkat
- Max 232Dokumen14 halamanMax 232abcx397Belum ada peringkat
- LMC7660 Switched Capacitor Voltage Converter PDFDokumen19 halamanLMC7660 Switched Capacitor Voltage Converter PDFePotyBelum ada peringkat
- sp3222 3232e PDFDokumen20 halamansp3222 3232e PDFJay LeeBelum ada peringkat
- CD4047Dokumen15 halamanCD4047mohankumarktvrBelum ada peringkat
- Ca3162 ADokumen7 halamanCa3162 Ajnax101Belum ada peringkat
- Iso122sensor de TensionDokumen15 halamanIso122sensor de TensionRichard ZerpaBelum ada peringkat
- ACT30BHTDokumen9 halamanACT30BHTRICHIHOTS2Belum ada peringkat
- SPPL12420RH1Dokumen11 halamanSPPL12420RH1essen999Belum ada peringkat
- Digital Potentiometer AD8400 8402 8403Dokumen32 halamanDigital Potentiometer AD8400 8402 8403Ozi ---Belum ada peringkat
- SN 75174Dokumen18 halamanSN 75174Odiin Antonhy MarthBelum ada peringkat
- Datasheet SN74HC04 - Hex InversorDokumen16 halamanDatasheet SN74HC04 - Hex InversorPablo CarvalhoBelum ada peringkat
- D D D D D D D D D D D D D D D: SN65ALS180, SN75ALS180 Differential Driver and Receiver PairsDokumen21 halamanD D D D D D D D D D D D D D D: SN65ALS180, SN75ALS180 Differential Driver and Receiver PairsjohnysonycumBelum ada peringkat
- Adm 232 AarnDokumen9 halamanAdm 232 AarnAnna Paula SantosBelum ada peringkat
- Ncl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsDokumen10 halamanNcl30160 1.0A Constant-Current Buck Regulator For Driving High Power LedsKhúc Hành QuânBelum ada peringkat
- UC3825ADWDokumen15 halamanUC3825ADWmichaelliu123456Belum ada peringkat
- 74ac11032 - OR PDFDokumen10 halaman74ac11032 - OR PDFgiuliano alvesBelum ada peringkat
- LM 318Dokumen11 halamanLM 318Diego LeeBelum ada peringkat
- Datasheet LTC1298 LTC1286 PDFDokumen24 halamanDatasheet LTC1298 LTC1286 PDFletterniBelum ada peringkat
- Delta PLC DVP SS ModelDokumen4 halamanDelta PLC DVP SS ModelTarun SonwaneBelum ada peringkat
- Low Power, +3.3 V, RS-232 Line Drivers/Receivers: F Charge Pump CapacitorsDokumen8 halamanLow Power, +3.3 V, RS-232 Line Drivers/Receivers: F Charge Pump Capacitorsmeroka2000Belum ada peringkat
- 600 Na, Rail-to-Rail Input/Output Op Amps: Features DescriptionDokumen40 halaman600 Na, Rail-to-Rail Input/Output Op Amps: Features DescriptionNguyen Danh HuyBelum ada peringkat
- SN754410 Quadruple Half-H Driver: 1,2EN 1A 1Y V 4A 4Y Heat Sink and Ground 3Y 3A 3,4EN Heat Sink and GroundDokumen10 halamanSN754410 Quadruple Half-H Driver: 1,2EN 1A 1Y V 4A 4Y Heat Sink and Ground 3Y 3A 3,4EN Heat Sink and GroundFrankin Esteban Carmona AguilarBelum ada peringkat
- SN 74 HC 191Dokumen17 halamanSN 74 HC 191Cristobal Silva SanhuezaBelum ada peringkat
- Pont en HDokumen17 halamanPont en Hapi-288039470Belum ada peringkat
- Payment of GratuityDokumen3 halamanPayment of GratuityPun GupBelum ada peringkat
- ADokumen61 halamanApj_chaudhary3796Belum ada peringkat
- ADokumen4 halamanApj_chaudhary3796Belum ada peringkat
- Howto Computeyour Capital GainsDokumen55 halamanHowto Computeyour Capital GainsAccounting & TaxationBelum ada peringkat
- EY ITS Course Session 10 Capital GainsDokumen36 halamanEY ITS Course Session 10 Capital Gainspj_chaudhary3796Belum ada peringkat
- Wire Gauge Selection TableDokumen1 halamanWire Gauge Selection Tablepj_chaudhary3796Belum ada peringkat
- Greenpeace Telecom Briefing PaperDokumen3 halamanGreenpeace Telecom Briefing Paperpj_chaudhary3796Belum ada peringkat
- Dse7420 Installation InstructionsDokumen2 halamanDse7420 Installation Instructionspj_chaudhary3796100% (1)
- R 220 A.V.R. For Shunt Alternators: 1 - DescriptionDokumen2 halamanR 220 A.V.R. For Shunt Alternators: 1 - Descriptionpj_chaudhary3796Belum ada peringkat
- Dse 74107420 Data SheetDokumen2 halamanDse 74107420 Data Sheetpj_chaudhary3796Belum ada peringkat
- Pti1000 B Esd5100 SeriesDokumen3 halamanPti1000 B Esd5100 Seriespj_chaudhary3796Belum ada peringkat
- Littelfuse 2920LDokumen6 halamanLittelfuse 2920Lpj_chaudhary3796Belum ada peringkat
- Pap 6600-20-v08Dokumen3 halamanPap 6600-20-v08marc_lobert4808100% (2)
- Pib1000 B Esd5100 SeriesDokumen6 halamanPib1000 B Esd5100 Seriespj_chaudhary3796Belum ada peringkat
- Pib1000 B Esd5100 SeriesDokumen6 halamanPib1000 B Esd5100 Seriespj_chaudhary3796Belum ada peringkat
- Multipoint Sequential: Injection System With BRC Electro-InjectorDokumen6 halamanMultipoint Sequential: Injection System With BRC Electro-Injectorpj_chaudhary3796100% (1)
- Higher Algebra - Hall & KnightDokumen593 halamanHigher Algebra - Hall & KnightRam Gollamudi100% (2)
- Multipoint Sequential: Injection System With BRC Electro-InjectorDokumen6 halamanMultipoint Sequential: Injection System With BRC Electro-Injectorpj_chaudhary3796100% (1)
- Pap 6600-20-v08Dokumen3 halamanPap 6600-20-v08marc_lobert4808100% (2)
- 82383Dokumen4 halaman82383pj_chaudhary3796Belum ada peringkat
- The Chief Executive Rural Electrification AuthorityDokumen2 halamanThe Chief Executive Rural Electrification AuthorityWayaya2009Belum ada peringkat
- The Evolution of Digital To Analog ConverterDokumen4 halamanThe Evolution of Digital To Analog ConverterCarlos ManuelBelum ada peringkat
- Artemide. 5 Years WarrantyDokumen126 halamanArtemide. 5 Years Warrantysalah eddine derkaouiBelum ada peringkat
- 3rd Periodical Exam GenPhy2Dokumen2 halaman3rd Periodical Exam GenPhy2VincentBelum ada peringkat
- Transistor C 548 BDokumen4 halamanTransistor C 548 BEdson GomesBelum ada peringkat
- FP06P Data Sheet: FP06P-S1-04-32-NU-V-77A-110A-M-30Dokumen1 halamanFP06P Data Sheet: FP06P-S1-04-32-NU-V-77A-110A-M-30Ainayya alfatimahBelum ada peringkat
- DOD Gonkulator How It Works OriginalDokumen1 halamanDOD Gonkulator How It Works OriginaltttymonBelum ada peringkat
- The Red Jacket UMP: Quick Troubleshooting GuideDokumen5 halamanThe Red Jacket UMP: Quick Troubleshooting GuideBrandon CatronBelum ada peringkat
- Design & Construction of 220 V Voltage StabilizerDokumen46 halamanDesign & Construction of 220 V Voltage StabilizerNitin VermaBelum ada peringkat
- 7ST6 Pi 76Dokumen8 halaman7ST6 Pi 76Nima MahmoudpourBelum ada peringkat
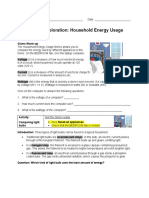
- Student Exploration: Household Energy UsageDokumen3 halamanStudent Exploration: Household Energy Usageshamiya farringtonBelum ada peringkat
- Appleton LED Luminaires Selection Guide: NEC/CEC Hazardous LocationDokumen2 halamanAppleton LED Luminaires Selection Guide: NEC/CEC Hazardous LocationDhrubajyoti BoraBelum ada peringkat
- A Closed-Loop Digitally Controlled MEMS Gyroscope With Unconstrained Sigma-Delta Force-FeedbackDokumen10 halamanA Closed-Loop Digitally Controlled MEMS Gyroscope With Unconstrained Sigma-Delta Force-FeedbackkvintacadBelum ada peringkat
- Leviton Catalogo GeneralDokumen816 halamanLeviton Catalogo GeneralGerardo Vargas LopezBelum ada peringkat
- DC Motor EarlierDokumen229 halamanDC Motor Earlieranoopingle9Belum ada peringkat
- Practical Work 5Dokumen9 halamanPractical Work 5Kalai ShanBelum ada peringkat
- MCC - TRB - Eee - 2021 - Answer KeyDokumen39 halamanMCC - TRB - Eee - 2021 - Answer KeysabilashBelum ada peringkat
- The Scully Groundhog™: Vehicle Static Grounding SystemDokumen3 halamanThe Scully Groundhog™: Vehicle Static Grounding SystemDiego Santiago D AguiBelum ada peringkat
- Zen Opt ManualDokumen171 halamanZen Opt ManualLynda ArchardBelum ada peringkat
- ENC-EDS800 Manual PDFDokumen140 halamanENC-EDS800 Manual PDFsrc.sussi822Belum ada peringkat
- Ua 733Dokumen11 halamanUa 733Marcelo ChavezBelum ada peringkat
- Simulation of Hybrid Power System Using Solar Power As Main Source and Fuel Cell As Backup SourceDokumen28 halamanSimulation of Hybrid Power System Using Solar Power As Main Source and Fuel Cell As Backup Sourceritusree mandal100% (1)
- Scilab - Ece ProgramsDokumen5 halamanScilab - Ece ProgramsYash PatelBelum ada peringkat
- BC-CR708 Operating ManualsDokumen31 halamanBC-CR708 Operating ManualsCV. HAKA JAYABelum ada peringkat
- New Online Loss-Minimization-Based Control of An Induction Motor DriveDokumen8 halamanNew Online Loss-Minimization-Based Control of An Induction Motor DriveKise RyotaBelum ada peringkat
- Antique Electronic Supply CatalogDokumen156 halamanAntique Electronic Supply CatalogDaniele Greco50% (2)