Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Cheat Sheet 01 HoDokumen4 halamanCheat Sheet 01 HoValeria GarciaBelum ada peringkat
- Impedance Tables: Element Type Component Voltage-Current ImpedanceDokumen1 halamanImpedance Tables: Element Type Component Voltage-Current ImpedanceValeria GarciaBelum ada peringkat
- 1 Month DietDokumen5 halaman1 Month DietNazia SalmanBelum ada peringkat
- Review - CH 04-05 - 20141009Dokumen11 halamanReview - CH 04-05 - 20141009Valeria GarciaBelum ada peringkat
- Fundamentals of Engineering Thermodynamics 7th Edition (Solutions Manual)Dokumen1.691 halamanFundamentals of Engineering Thermodynamics 7th Edition (Solutions Manual)joe_grn64% (267)
- Handwritten 2tromDokumen4 halamanHandwritten 2tromValeria GarciaBelum ada peringkat
- Method of Multiple ScalesDokumen4 halamanMethod of Multiple ScalesValeria GarciaBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Criteria For Use in Evaluation of Testing Laboratories and Organizations For Examination and Inspection of Steel, Stainless Steel, and Related AlloysDokumen5 halamanCriteria For Use in Evaluation of Testing Laboratories and Organizations For Examination and Inspection of Steel, Stainless Steel, and Related AlloysProduction DepartmentBelum ada peringkat
- Resume FixedDokumen2 halamanResume Fixedapi-356691606Belum ada peringkat
- Multidimensional Flow Modeling of The Compression Test of A Gaede Pump Stage in The Viscous RegimeDokumen9 halamanMultidimensional Flow Modeling of The Compression Test of A Gaede Pump Stage in The Viscous RegimeAsif HameedBelum ada peringkat
- PDF EnglishDokumen36 halamanPDF EnglishSanti CheewabantherngBelum ada peringkat
- Aerospace Material Specification: Polytetrafluoroethylene (PTFE) Moldings General Purpose Grade, As SinteredDokumen8 halamanAerospace Material Specification: Polytetrafluoroethylene (PTFE) Moldings General Purpose Grade, As SinteredMax Salogni50% (2)
- Access MISS ProxyDokumen7 halamanAccess MISS ProxyKorintus TedyBelum ada peringkat
- Fuel Metering Valve: Operation and Maintenance InstructionsDokumen33 halamanFuel Metering Valve: Operation and Maintenance Instructionsalaa fadhelBelum ada peringkat
- Banksy Responses Done With A Partner 655512Dokumen122 halamanBanksy Responses Done With A Partner 655512api-569248887Belum ada peringkat
- Introduction EthicsDokumen26 halamanIntroduction EthicsLawrence MarquezBelum ada peringkat
- 2 Mathematics For Social Science-1-1Dokumen58 halaman2 Mathematics For Social Science-1-1ሀበሻ EntertainmentBelum ada peringkat
- Winning at New ProductsDokumen24 halamanWinning at New Products劉緯文100% (1)
- Appendix in Research PaperDokumen6 halamanAppendix in Research Papergvzfmq91100% (1)
- Planmeca Promax 3D Max CBVT Product PresentationDokumen36 halamanPlanmeca Promax 3D Max CBVT Product PresentationAD TwentyOne DentalBelum ada peringkat
- Current Office Phone Number Vijayawada, Andhra Pradesh (A.p.)Dokumen11 halamanCurrent Office Phone Number Vijayawada, Andhra Pradesh (A.p.)Manoj Digi Loans100% (1)
- MAS500 2011 Vår Masteroppgave Henrik Engedal Per Magne EgelidDokumen130 halamanMAS500 2011 Vår Masteroppgave Henrik Engedal Per Magne EgelidPoppy DanielsBelum ada peringkat
- Chapter 1 To7 With Course OutlineDokumen34 halamanChapter 1 To7 With Course Outlinerk_kamatchi3483Belum ada peringkat
- Aashto t87Dokumen3 halamanAashto t87AL Bé NizBelum ada peringkat
- 10th Syllbus PDFDokumen104 halaman10th Syllbus PDFGagandeep KaurBelum ada peringkat
- What Is Situational Coaching and When To Use ItDokumen3 halamanWhat Is Situational Coaching and When To Use ItBrian KamoedBelum ada peringkat
- Training Guide: Administering Windows Server 2012Dokumen33 halamanTraining Guide: Administering Windows Server 2012sabastianBelum ada peringkat
- An Example of A Rating Scale To Q4Dokumen4 halamanAn Example of A Rating Scale To Q4Zeeshan ch 'Hadi'Belum ada peringkat
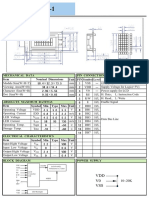
- V0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemDokumen1 halamanV0 VSS VDD: Unit PIN Symbol Level Nominal Dimensions Pin Connections Function Mechanical Data ItemBasir Ahmad NooriBelum ada peringkat
- Title DefenseDokumen3 halamanTitle DefenseLiezl Sabado100% (1)
- Exercises-Consumption Based Planning PDFDokumen4 halamanExercises-Consumption Based Planning PDFfitroniBelum ada peringkat
- Skinner Reinforcement TodayDokumen6 halamanSkinner Reinforcement TodayEnrique Hernández RosasBelum ada peringkat
- Excavation and Trenching Implementation PlanDokumen29 halamanExcavation and Trenching Implementation Planracing.phreakBelum ada peringkat
- APP PinAAcle 900 Elemental Analysis of Beer by FAAS 012049 01Dokumen3 halamanAPP PinAAcle 900 Elemental Analysis of Beer by FAAS 012049 01strubingeraBelum ada peringkat
- BD Bactec Mgit 960 Mycobacteria Culture SystemDokumen6 halamanBD Bactec Mgit 960 Mycobacteria Culture SystemHuguens DesrosiersBelum ada peringkat
- Semiconductor Application Library ManualDokumen494 halamanSemiconductor Application Library ManualValerioApicellaBelum ada peringkat
- Las-Shs Gen - Chem Melc 1 q2 Week-1Dokumen11 halamanLas-Shs Gen - Chem Melc 1 q2 Week-1Carl Baytola RatesBelum ada peringkat