Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Manual Roland Xp-30Dokumen212 halamanManual Roland Xp-30Jose Luis Rojas Flores100% (1)
- Chronic Conditions Data Warehouse Medicare Administrative Data User GuideDokumen39 halamanChronic Conditions Data Warehouse Medicare Administrative Data User GuideBladimir Tirzo EspinozaBelum ada peringkat
- Osisense XM Xmlf100d2025Dokumen2 halamanOsisense XM Xmlf100d2025Bladimir Tirzo EspinozaBelum ada peringkat
- Osisense XM Xmlf100d2025Dokumen2 halamanOsisense XM Xmlf100d2025Bladimir Tirzo EspinozaBelum ada peringkat
- Ni Usb 6501Dokumen22 halamanNi Usb 6501Bladimir Tirzo EspinozaBelum ada peringkat
- HP LoadRunner Mobile Recorder tutorial captures Android app trafficDokumen3 halamanHP LoadRunner Mobile Recorder tutorial captures Android app trafficPriyank AgarwalBelum ada peringkat
- 21MB3206 - Unit VDokumen111 halaman21MB3206 - Unit Vprem nathBelum ada peringkat
- List Operations in JavaDokumen4 halamanList Operations in Javamadhu jhaBelum ada peringkat
- Adina LipaiDokumen7 halamanAdina LipaiAdriana CalinBelum ada peringkat
- MM-06 Invoice VerificationDokumen23 halamanMM-06 Invoice VerificationRodrigo MadrigalBelum ada peringkat
- IBM Content Manager OnDemand and FileNet-2Dokumen88 halamanIBM Content Manager OnDemand and FileNet-2David ResendizBelum ada peringkat
- IEWB-RS Technology Labs Eigrp: Brian Dennis, CCIE # 2210 (R&S / ISP Dial / Security / Service Provider)Dokumen51 halamanIEWB-RS Technology Labs Eigrp: Brian Dennis, CCIE # 2210 (R&S / ISP Dial / Security / Service Provider)Nandan BishtBelum ada peringkat
- LDA KNN LogisticDokumen29 halamanLDA KNN Logisticshruti gujar100% (1)
- 54 Channel EEG Digital SystemDokumen2 halaman54 Channel EEG Digital SystemDavit SoesantoBelum ada peringkat
- Implementation of Information Technology in RedFox Internet CafeDokumen13 halamanImplementation of Information Technology in RedFox Internet CafeMuhamad Adji YahyaBelum ada peringkat
- Cad 17 (4) 2020 740-751Dokumen12 halamanCad 17 (4) 2020 740-751GunawanMBelum ada peringkat
- Telit GL865-DUAL-QUAD Hardware User Guide r7Dokumen76 halamanTelit GL865-DUAL-QUAD Hardware User Guide r7salasugo5751Belum ada peringkat
- Log FarcryDokumen7 halamanLog FarcrySergioBelum ada peringkat
- Oa-Kdp-Module 1Dokumen4 halamanOa-Kdp-Module 1Ryan AmaroBelum ada peringkat
- I-Unit C#Dokumen20 halamanI-Unit C#Swapnil RathodBelum ada peringkat
- 22a Um001e en eDokumen108 halaman22a Um001e en eNelson ContrerasBelum ada peringkat
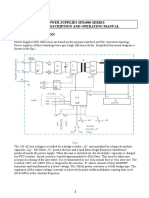
- Power Supplies SPS1000 Series Operating ManualDokumen7 halamanPower Supplies SPS1000 Series Operating ManualKrystyna ZaczekBelum ada peringkat
- Crash 2023 05 28 - 22.13.25 ClientDokumen7 halamanCrash 2023 05 28 - 22.13.25 Clientdanker37xpBelum ada peringkat
- Remote SensingDokumen31 halamanRemote SensingKousik BiswasBelum ada peringkat
- WindowsDokumen52 halamanWindowskkzainulBelum ada peringkat
- IBM Cognos 10 Report Studio periodsToDate function and OLAP running totalsDokumen3 halamanIBM Cognos 10 Report Studio periodsToDate function and OLAP running totalsHarry KonnectBelum ada peringkat
- EK205 Quick Reference Guide enDokumen12 halamanEK205 Quick Reference Guide enmohamedwalyBelum ada peringkat
- Instructions in Locating Earth FaultsDokumen3 halamanInstructions in Locating Earth Faultsraghav4life8724Belum ada peringkat
- Creating EPortfolio As A Technology ToolDokumen56 halamanCreating EPortfolio As A Technology ToolTrisha CenitaBelum ada peringkat
- EUBIS SOP-Master Version 1 0Dokumen4 halamanEUBIS SOP-Master Version 1 0iman8869Belum ada peringkat
- The Air Land Sea Bulletin: Tactical Convoy OperationsDokumen24 halamanThe Air Land Sea Bulletin: Tactical Convoy OperationsMarko Hadzi-RisticBelum ada peringkat
- Higher-Order Ghost StateDokumen14 halamanHigher-Order Ghost StateamandaBelum ada peringkat
- (Computer Science) Part-I Part-II (Masters Level)Dokumen1 halaman(Computer Science) Part-I Part-II (Masters Level)ShoukatSoomroBelum ada peringkat
- Sharp Lc32wd1e LCDDokumen202 halamanSharp Lc32wd1e LCDMarkBelum ada peringkat