Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Checklist Registration IP Summer 2016Dokumen1 halamanChecklist Registration IP Summer 2016Yusuf SalmanBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Smiley Workshop 18 Serial Communications Part1 GuiDokumen6 halamanSmiley Workshop 18 Serial Communications Part1 GuiYusuf SalmanBelum ada peringkat
- Esquema Arduino UNO R3Dokumen1 halamanEsquema Arduino UNO R3stangne1Belum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Jónsi - Go DoDokumen1 halamanJónsi - Go DoYusuf SalmanBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- English 4 Realistic FictionDokumen5 halamanEnglish 4 Realistic FictionRose Marie RebutaBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- English II Homework Module 6Dokumen5 halamanEnglish II Homework Module 6Yojana DubonBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Ifrs SapDokumen6 halamanIfrs Sapravikb01Belum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Assignment 4: Chitresh KumarDokumen7 halamanAssignment 4: Chitresh KumarChitreshKumarBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
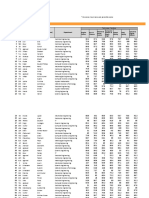
- Innoventure List of Short Listed CandidatesDokumen69 halamanInnoventure List of Short Listed CandidatesgovindmalhotraBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Fruits Basket - MemoryDokumen1 halamanFruits Basket - Memorywane10132100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- OM Version 1Dokumen497 halamanOM Version 1Sushant SinghBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Research Methods SESSIONS STUDENTS Abeeku PDFDokumen287 halamanResearch Methods SESSIONS STUDENTS Abeeku PDFdomaina2008100% (3)
- c4 Index PDFDokumen100 halamanc4 Index PDFhitkajiBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Meet and Greet Officer PDFDokumen85 halamanMeet and Greet Officer PDFJoby JoseBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Explosives Sazfety Seminar 1992 AD A261116Dokumen634 halamanExplosives Sazfety Seminar 1992 AD A261116lpayne100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- ABAP Performance Tuning Tips and TricksDokumen4 halamanABAP Performance Tuning Tips and TricksEmilSBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Chapter I - Logic and Proofs: PropositionsDokumen18 halamanChapter I - Logic and Proofs: PropositionsNênđặttênngắnTêndàiAimàmuốnđọcBelum ada peringkat
- PV Quick StartDokumen61 halamanPV Quick StartMayur PatelBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Proposal Kerja PraktekDokumen11 halamanProposal Kerja PraktekBilly Dentiala Irvan100% (1)
- Associate Cloud Engineer - Study NotesDokumen14 halamanAssociate Cloud Engineer - Study Notesabhi16101Belum ada peringkat
- Cambridge AS Business SyllabusDokumen2 halamanCambridge AS Business SyllabusEnox ChangBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- 20 Issues For Businesses Expanding InternationallyDokumen24 halaman20 Issues For Businesses Expanding InternationallySubash RagupathyBelum ada peringkat
- A Practical Guide To Geostatistical - HenglDokumen165 halamanA Practical Guide To Geostatistical - HenglJorge D. MarquesBelum ada peringkat
- Green ManagementDokumen58 halamanGreen ManagementRavish ChaudhryBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Edci 67200 Abby Carlin Case Study FacilitationDokumen9 halamanEdci 67200 Abby Carlin Case Study Facilitationapi-265670845Belum ada peringkat
- CM6 - Mathematics As A Tool - Dispersion and CorrelationDokumen18 halamanCM6 - Mathematics As A Tool - Dispersion and CorrelationLoeynahcBelum ada peringkat
- Anthro250J/Soc273E - Ethnography Inside Out: Fall 2005Dokumen10 halamanAnthro250J/Soc273E - Ethnography Inside Out: Fall 2005Raquel Pérez AndradeBelum ada peringkat
- P1 88thminutesDokumen42 halamanP1 88thminutesVaishnavi JayakumarBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- A Wish Poetry Analysis Long Bond Paper PrintDokumen2 halamanA Wish Poetry Analysis Long Bond Paper PrintJosephine OngBelum ada peringkat
- Storage Center: Command Set 4.1Dokumen174 halamanStorage Center: Command Set 4.1luke.lecheler5443Belum ada peringkat
- Virtually Anywhere Lesson Plan Episodes 1 and 2Dokumen6 halamanVirtually Anywhere Lesson Plan Episodes 1 and 2Elyelson dos Santos GomesBelum ada peringkat
- A New Approach To Economic Development in NunavutDokumen26 halamanA New Approach To Economic Development in NunavutNunatsiaqNewsBelum ada peringkat
- IO Chapter6 FinalDokumen10 halamanIO Chapter6 FinalJulia MoplaBelum ada peringkat
- Session ManagementDokumen4 halamanSession ManagementahamedyaseenBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)