Edital PDF
Diunggah oleh
Leonardo Alexandrino0 penilaian0% menganggap dokumen ini bermanfaat (0 suara)
18 tayangan13 halamanHak Cipta
© © All Rights Reserved
Format Tersedia
PDF, TXT atau baca online dari Scribd
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
© All Rights Reserved
Format Tersedia
Unduh sebagai PDF, TXT atau baca online dari Scribd
0 penilaian0% menganggap dokumen ini bermanfaat (0 suara)
18 tayangan13 halamanEdital PDF
Diunggah oleh
Leonardo AlexandrinoHak Cipta:
© All Rights Reserved
Format Tersedia
Unduh sebagai PDF, TXT atau baca online dari Scribd
Anda di halaman 1dari 13
1
Universidade Federal de Santa Catarina
Programa de Ps-Graduao em Engenharia Mecnica
EMC410004 Projeto Conceitual de Mecanismos
Aluno: Leonardo Alexandrino Proena
1. Introduo
O Banco Nacional do Desenvolvimento Econmico e Social BNDES e a
Financiadora de Estudos e Projetos FINEP, com apoio da Petrleo Brasileiro S.A.
PETROBRAS, publicaram um edital para seleo conjunta de planos de negcios de
empresas visando apoio financeiro a projetos de inovao tecnolgica industrial no
mbito do programa INOVA PETRO.
O programa tem a finalidade de fomentar projetos de pesquisa,
desenvolvimento, engenharia e/ou absoro tecnolgica, produo e
comercializao de produtos, processos e/ou servios inovadores para a cadeia
produtiva da indstria de petrleo e gs natural. Os projetos devem estar
alinhados a uma das trs linhas temticas principais, que so (i) Processamento de
Superfcie; (ii) Instalaes Submarinas; (iii) Instalaes de Poos.
Dentro da linha (ii), Instalaes Submarinas, encontra-se o subtema
Desenvolvimento de ferramentas para prestao de servios de inspeo e
manuteno de equipamentos, dutos flexveis, dutos rgidos e umbilicais
submarinos. O projeto a ser desenvolvido ser dentro desse subtema.
1.1. Dutos flexveis
Na extrao de petrleo em ambiente submarino, so utilizados dutos flexveis,
tambm chamados de risers, para transportar petrleo e gs desde os poos
produtores at a unidade de armazenamento ou processamento na superfcie
(Hernndez, 2012).
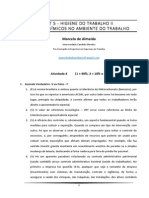
Os risers flexveis so construdos atravs da superposio de camadas plsticas
e de camadas de ao espiraladas, que fornecem estanqueidade interna e externa.
As camadas de ao, tambm chamadas de armadura, so responsveis pela
resistncia mecnica aos diversos tipos de carregamento aos quais os dutos
flexveis esto submetidos. A principal caracterstica desse tipo de duto a baixa
resistncia flexo. A Figura 1 mostra os componentes internos de um duto
flexvel (Hernndez, 2012).
1.2. Falhas em dutos flexveis
Junto com o petrleo tambm so extrados gases residuais e outros
compostos corrosivos que atacam os dutos. Dessa forma, necessria que seja
feita a inspeo e a manuteno constante dos risers, alm da troca quando este
componente encontra-se comprometido (Martins, 2008).
Devido ao nmero de materiais que so empregados e a complexidade de
montagem, existe diversas possibilidades de falhas para os dutos flexveis. As
principais falhas, segundo (Hernndez, 2012) so:
2
Figura 1 - Estrutura interna de um duto flexvel (Hernndez, 2012)
Degradao da camada polimrica de presso interna;
Formao de parafina ou hidrato e consequente reduo de vazo;
Ruptura de risers pela trao, ruptura por fadiga nas armaduras;
Trinca do corpo polimrico;
Flambagem das armaduras de trao durante operao ou instalao;
Abraso da capa externa e das camadas de trao, causada pelo contato
com rochas e coral presentes no fundo do mar;
Fadiga e/ou corroso das armaduras aps ruptura da capa externa durante
instalao;
Trincas na camada polimrica de presso interna.
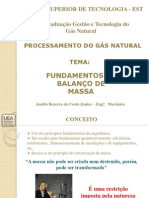
A Figura 2 apresenta as quatro falhas mais comuns em dutos flexveis, elas so a
gaiola de passarinho (Birdcage), ruptura da armadura de trao (Wire cracking),
danos a camada polimrica, e trinca e dano a camada polimrica externa
(Hernndez, 2012).
Figura 2 - Principais falhas em dutos flexveis (Hernndez, 2012)
3
1.3. Inspeo de dutos flexveis
Algumas das tcnicas disponveis atualmente para a inspeo e diagnstico de
falhas em risers so, por exemplo, raios-x, gamagrafia e ultrassom. Essas tcnicas
so utilizadas em dispositivos de inspeo interna, como PIGs (Pipeline Inspection
Gauge). Uma grande desvantagem desse tipo de equipamento a necessidade de
reter a vazo do fluido transportado. PIGs so os principais equipamentos
utilizados atualmente pela indstria petrolfera para fazer o diagnstico e avaliao
da integridade estrutural das tubulaes (Hernndez, 2012).
Figura 3 PIG (Hernndez, 2012)
Os veculos submarinos de operao remota ou ROVs (Remotely Operated
Vehicles) tm sido utilizados para auxiliar na realizao de diversas tarefas pela
indstria petrolfera, entre elas podem-se citar as tarefas de perfurao, instalao,
construo, inspeo e manuteno de estruturas submersas (Hernndez, 2012).
As operaes de inspeo utilizam mergulhadores, mas as tarefas que eles
podem realizar esto limitadas pelas caractersticas do ambiente. Geralmente os
mergulhadores conseguem realizar apenas a inspeo visual do duto e detectar
falhas na camada polimrica (Hernndez, 2012).
Para grandes profundidades, como o caso das reservas de petrleo
encontradas no Brasil, no possvel a utilizao de mergulhadores. Nessas
condies o uso de ROVs uma opo vivel. Recentemente foram apresentados
alguns sistemas tipo ROV para a inspeo externa de dutos, mas no h muitas
informaes disponveis (Hernndez, 2012).
1.4. Proposta de projeto
AUVs (Autonomous Underwater Vehicles) possuem custo operacional
significativamente mais baixo que ROVs por no necessitarem de um operador
qualificado e habilidoso operando o veculo durante toda a misso, o que tambm
limita o tempo total de misso (Floriani, 2013).
Dessa forma, prope-se um sistema de inspeo de dutos flexveis baseado em
um veculo subaqutico autnomo (AUV).
4
2. Reviso bibliogrfica
Nesta seo ser apresentada uma reviso das fontes bibliogrficas
pesquisadas e organizadas por tema.
2.1. Veculos subaquticos (AUV e ROV)
Hernndez (2012) prope que ROVs constituem uma alternativa vivel para
operaes de avaliao de estado, condio e integridade estrutural dos dutos
flexveis de transporte de petrleo (risers), no entanto no h muitas informaes
disponveis sobre esse tema. O autor argumenta acerca da necessidade de se
conhecer o comportamento dinmico desse tipo de veculo, para que a aplicao
desejada seja vivel. Para tanto, o autor prope um modelo genrico de seis graus
de liberdade para esse tipo de veculo junto com um modelo de controle robusto
baseado em modos deslizantes que permita o controle da trajetria do veculo
subaqutico, apesar das incertezas associadas modelagem e aos parmetros de
controle.
Devido as poucas iniciativas de se construir um ROV de baixo custo com
tecnologia brasileira, e a essas poucas iniciativas estarem restritas a algumas
poucas instituies acadmicas, Centeno (2007) deu continuidade ao projeto e
construo de um ROV de baixo custo na FURG. No trabalho foram feitas pequenas
modificaes estruturais e grandes alteraes na eletrnica embarcada do veculo.
Foram obtidos tambm alguns resultados experimentais envolvendo controle de
profundidade em malha fechada do veculo.
Magalhes (2007) apresenta em sua tese o projeto conceitual,
desenvolvimento, e a construo de um ROV, e discute os detalhes do projeto e de
algumas solues construtivas, alm de caractersticas relacionadas ao
comissionamento e operao do veculo. O objetivo do trabalho o projeto de um
veculo de baixo custo capaz de realizar variadas misses de inspeo, e em
especial a inspeo de usinas hidreltricas.
Christ & Wernli (2007) apresentam as tcnicas bsicas para a operao de
micro-ROVs em diversos tipos de aplicaes diferentes. Apresentam tambm
assuntos tcnicos relacionados ao projeto de ROVs ou suas aplicaes, por
exemplo, os componentes de um ROV, o funcionamento de sistemas acsticos de
posicionamento, conceitos bsicos de oceanografia, entre outros.
Griffiths (2003) reuniu uma srie de artigos de diversos autores que cobrem os
aspectos bsicos da tecnologia envolvida nos AUVs. Alguns desses assuntos so:
fontes de energia para AUVs, influncia de materiais avanados no projeto de
AUVs, as tarefas realizadas por esses veculos na indstria offshore, AUV movido a
energia solar, sensores utilizados para pesquisa martima.
Floriani (2013) desenvolveu o projeto conceitual de um AUV para a investigao
de guas rasas que fosse economicamente vivel e que minimizasse o risco de sua
operao para o operador e o ambiente marinho quando comparado a outras
solues.
Bingham, Drake, Hill, & Lott (2002) apresentam em seu artigo suas experincias
com a tecnologia de AUVs e os requisitos que esses veculos devem atender para
aumentar sua aceitao pela indstria de petrleo e gs.
5
Yuh (2000) apresenta em seu artigo algumas reas chave do estado-da-arte da
robtica subaqutica da poca. Apresenta uma lista dos AUVs desenvolvidos
durante a dcada de 1990, a dinmica de AUVs, seus subsistemas e comparaes
entre alguns princpios de soluo empregados em AUVs.
2.2. Inspeo de dutos flexveis
Em sua tese, Martins (2008) desenvolve metodologias para a caracterizao do
estado de tenses de arames da armadura de trao de risers flexveis atravs de
medies de parmetros micromagnticos. Os resultados mostraram uma grande
aplicabilidade dos mtodos micromagnticos, obtendo boa correlao entre as
medies e os carregamentos aplicados aos corpos de prova.
Devido as suas propriedades mecnicas, materiais compsitos podem ser
utilizados em dutos flexveis com bastante sucesso. No entanto, no existe um
mtodo consolidado para a inspeo no destrutiva desses materiais. Almeida
(2011) avalia e determina os parmetros de ensaio para inspeo ultrassnica para
detectar defeitos na unio entre trechos de dutos feitos em materiais compsitos.
Silveira Junior & Marnet (2008) patentearam um equipamento para limpeza e
inspeo de risers flexveis em catenria livre. O equipamento consiste em uma
estrutura montada em torno do riser que possui cmaras de lastro e garrafas de ar
comprimido para promover a movimentao do equipamento. O equipamento faz
a limpeza do riser enquanto se desloca e, adicionalmente, pode fazer sua inspeo
visual ou ensaios no-destrutivos, dependendo dos instrumentos que forem
instalados no equipamento.
Motta & Cunha (2006) patentearam equipamento e mtodo para inspeo de
superfcie externa de tubulaes submersas. O mtodo de inspeo consiste no
uso dos seguintes equipamentos: equipamento de iamento, uma ferramenta de
captura de tubulaes com capacidade de se mover ao longo da tubulao, e um
equipamento de inspeo interligado a um ROV. A inspeo realizada iando a
seo da tubulao a ser inspecionada, em seguida posicionando e ajustando a
ferramenta de inspeo junto tubulao, e finalmente movimento a ferramenta
ao longo da tubulao.
Mesquita & Camerini (2007) patentearam uma ferramenta para inspeo de
corroso em colunas verticais e seu mtodo de aplicao. A ferramenta
compreende um arranjo particular de componentes especficos capaz de deslizar
verticalmente no interior da coluna montada, fazendo sua inspeo completa.
Menegaldo, Brito, & Santos (2009) patentearam um aparelho externo para
inspeo universal de tubulaes em catenria livre. O aparelho acoplado
externamente a uma tubulao em catenria livre, envolve-a por todo o seu
permetro e permite a realizao de inspees no destrutivas diversas enquanto
se move ao longo da tubulao. O deslocamento descendente se d atravs da
fora da gravidade e o retorno superfcie se d pela expanso de gases.
6
2.3. Metodologia de projeto e plano de negcios
Nakamura (2010) prope a associao dos conceitos enxutos a um modelo de
referncia para o processo de desenvolvimento de produtos, de forma que os
produtos resultantes se beneficiem da simplificao dos processos, aumento da
qualidade e reduo do tempo necessrio de desenvolvimento. Para isso foram
estudados os conceitos da manufatura enxuta, proposta uma adaptao dos
princpios da manufatura enxuta para o processo de desenvolvimento de produtos
e feita a associao da adaptao s fases iniciais do processo, saber, as fases de
projeto informacional e conceitual.
Ward (2007) apresenta os conceitos fundamentais de um sistema lean de
desenvolvimento de produtos. Na primeira parte o autor faz uma anlise dos
sistemas convencionais de desenvolvimento de produtos e os desperdcios
associados a esses sistemas, a comparao com um sistema lean, e a definio do
conceito de valor. Na segunda parte os desperdcios so analisados mais
profundamente e apresentada uma forma de evit-los. Na terceira parte
apresentado como as ferramentas de Engenharia Simultnea com Multiplas
Alternativas (do ingls Set-Based Concurrent Engineering) e curvas de trade-off
devem ser utilizadas em um sistema lean, alm de um modelo de gesto adequado
a esse tipo de sistema. Na quarta parte feita uma reviso do livro.
Osterwalder (2010) apresenta uma ferramenta grfica para gerar e avaliar
rapidamente modelos de negcios, chamada Business Model Canvas. A ferramenta
consiste em uma folha de papel dividida em nove partes que representam os
principais aspectos a serem levados em considerao em um modelo de negcios.
As nove partes so: seguimento de mercado, proposio de valor, canais de
comunicao com o cliente, relacionamento com o cliente, fluxos de caixa,
recursos chave, atividades chave, parcerias chave e estrutura de custos. Ao longo
do livro diversos modelos de negcio so analisados.
Bernardi (2011) apresenta as etapas a serem seguidas para a estruturao de
um plano de negcios.
7
3. Escopo do Projeto
Nas prximas sees ser apresentado o escopo do projeto para se adequar as
propostas do edital.
3.1. Linha temtica
A linha temtica a ser seguida no projeto a Desenvolvimento de ferramentas
e prestao de servios de inspeo e manuteno de equipamentos, dutos
flexveis, dutos rgidos e umbilicais submarinos.
O objetivo do projeto comercializar os produtos desenvolvidos e tambm
fornecer servios baseados na utilizao dos produtos desenvolvidos.
No Brasil ainda predominante o uso de mergulhadores para operaes de
inspeo e manuteno, havendo poucas empresas oferecendo servios baseados
em ROVs e ainda menos empresas oferecendo servios baseados em AUVs. Dessa
forma, a oferta de servios baseados em ROVs e, principalmente, AUVs aparenta
ser uma opo atraente do ponto de vista do mercado.
3.2. Projeto
O projeto de desenvolvimento ser um veculo subaqutico no tripulado para
misses de inspeo e manuteno de dutos flexveis, podendo o veculo ser
autnomo ou controlado remotamente.
Algumas das inovaes possveis nesse projeto so: o prprio veculo a ser
desenvolvido, os tipos de materiais a serem utilizados, a fonte de energia, modelo
de controle utilizado, entre outras. O projeto tem potencial bastante grande para a
gerao de patentes.
Os principais desafios para a realizao do projeto so em relao
confiabilidade do produto desenvolvido, a obteno de materiais adequados ao
projeto, a fonte de energia a ser utilizada e a contratao de pessoas qualificadas
para a realizao do projeto.
O projeto foi dividido em trs grandes reas: Projeto Informacional, Projeto
Conceitual e Projeto Detalhado. As tarefas foram determinadas com base nos
conceitos apresentados em (Ward, 2007) e (Nakamura, 2010). Foi dada grande
nfase na gerao e anlise de conceitos de subsistemas para o veculo, e a
comprovao dos conceitos atravs de experimentos. Tentou-se tambm explicitar
no cronograma a importncia dos clientes no processo de desenvolvimento do
produto. A durao do perodo de projeto foi estimada em trs anos. A Figura 4
apresenta o cronograma.
8
Figura 4- Cronograma
9
3.3. Riscos e objetivos do projeto
Os principais riscos associados ao projeto so:
O produto no ser vivel tecnicamente ou economicamente;
O produto no atender aos desejos do mercado;
O preo dos produtos e servios no estar de acordo com o que o
mercado deseja pagar;
Ausncia de fornecedores e mo-de-obra qualificados;
Os objetivos do projeto so descritos abaixo. Os objetivos foram baseados em
(Bingham, Drake, Hill, & Lott, 2002) e foram definidos de forma a dar flexibilidade
ao processo de desenvolvimento de produto (Nakamura, 2010).
Profundidade de operao: 1500 - 2000 m
Velocidade de operao: 2 - 3 m/s
Durao da bateria: 24 48 horas / 200 - 400 km
Sistema de evitamento de coliso, sonar de varredura lateral, perfilador,
batmetro;
3.4. Equipe de projeto
Com base nas atividades a serem desenvolvidas e nos sistemas componentes
de um veculo subaqutico (Yuh, 2000), definiu-se a equipe de projeto. O resultado
est apresentado na Erro! Auto-referncia de indicador no vlida..
Tabela 1 - Equipe de projeto
Sistema Subsistema Responsvel
Misso Sensores para investigao 1 Eng. eletricista
Sensores para navegao 1 Eng. eletricista + 1 de
controle e automao
Comunicao / Auto-diagnstico 1 Eng. eletricista ou de
controle e automao
Controle de misso 1 Eng. de controle e
automao + 1 mecnico
ou eletricista
Plataforma Estrutura / Sistemas de emergncia 1 Eng. mecnico
Propulso 1 Eng. mecnico
Fonte de Energia 1 Eng. eletricista
Outros Manufatura 1 Eng. mecnico ou de
materiais
Testes 2 Engenheiros
10
3.5. Custos
A Tabela 2 apresenta o custo estimado de um veculo. A Tabela 3 apresenta o
custo estimado para o projeto.
Tabela 2- Custos do veculo
Componente
Custo
(R$) Descrio
Sistema
Misso
Sensores para
investigao 30000 Sonar de varredura lateral, perfilador, batmetro
Sensores para
navegao 50000
IMU, giroscpio de fibra tica, sensor de
presso, sistema
de posicionamento acstico, altmetro
Auto-diagnstico 2000
Sensor de voltagem, sensor de rotao dos
propulsores,
sensor de temperatura, sensor de vazamento
Comunicao 10000 Modem acstico
Controle da
misso 2000 Microcontrolador
Plataforma Estrutura 9000 Alumnio, ao, fibra de vidro, espuma sinttica
Propulso 4000 Propulsor, hlice, servos, superfcies de controle
Fonte de energia 8000 Baterias, sistema de gerenciamento
Sistemas de
emergncia 5000 Bias de emergncia, sinal luminoso
Fabricao Servios 30000
Usinagem, soldagem, moldagem de polmeros,
laminao de fibra de vidro
Total produto 150000
Tabela 3 - Custos do projeto
Componente Custo (R$) Descrio
Projeto Equipe 2808000
12 Engenheiros, 36 meses, R$6500/ms
Prottipos 1500000
10 x Total produto
Testes 750000
5 x Total produto
Total projeto 5058000
11
4. Concluso
Neste trabalho foi apresentada uma proposta de projeto para o edital para
seleo conjunta de planos de negcios de empresas visando apoio financeiro a
projetos de inovao tecnolgica industrial no mbito do programa INOVA PETRO.
Foi feita uma reviso bibliogrfica sobre temas relacionados ao edital, veculos
subaquticos, inspeo de dutos flexveis e metodologia de projeto e modelos de
negcios.
Na sequncia foi apresentado o escopo do projeto, com a linha temtica a ser
seguida, uma descrio do projeto junto com as principais etapas, os riscos do
projeto e os custos.
12
Referncias
Almeida, P. (2011). Inspeo por ultrassom de juntas adesivas de tubulaes em material
compsito. Rio de Janeiro: UFRJ.
Bernardi, L. (2011). Manual de Plano de Negcios: fundamentos, processos e estruturao. So
Paulo: Editora Atlas.
Bingham, D., Drake, T., Hill, A., & Lott, R. (2002). The Application of Autonomous Underwater
Vehicle (AUV) technology in the oil industry - Vision and experiences . Aberdeen.
Centeno, M. (2007). ROVFURG-II: Projeto e construo de um veculo no tripulado de baixo
custo. Rio Grande.
Christ, R., & Wernli, R. (2007). The ROV Manual: A User Guide for Observation-Class Remotely
Operated Vehicles. Elsevier.
Floriani, B. (2013). Proposta de uma soluo conceitual de um sistema de investigao
subaqutico para guas rasas. Florianpolis: UFSC/POSMEC.
Griffiths, G. (2003). Technology and Applications of Autonomous Underwater Vehicles. Londres:
Taylor & Francis.
Hernndez, W. P. (2012). Modelagem dinmica de um rob submarino semi-autnomo (tipo
ROV) para inspeo de risers. Rio de Janeiro: UFRJ/COPPE.
Magalhes, P. (2007). Desenvolvimento de um submersvel remotamente operado de baixo
custo e caracterizao dos sistemas de propulso e vetorizao de empuxo por hlice. Belo
Horizonte: UFMG.
Martins, C. O. (2008). Desenvolvimento de metodologias de inspeo e monitoramento de
risers flexveis atravs de tcnicas micromagnticas de anlises de tenso. Porto Alegre:
UFRGS/PPGEM.
Menegaldo, L., Brito, M., & Santos, M. (2009). Patente N PI 0705113-1 A2. Brasil.
Mesquita, L., & Camerini, C. (2007). Patente N PI 0504436-7 A. Brasil.
Motta, A., & Cunha, C. (2006). Patente N PI 0500075-0 A. Brasil.
Nakamura, G. (2010). Incluso dos conceitos enxutos nas fases iniciais do processo de projeto
de produtos. Florianpolis: UFSC.
Osterwalder, A. (2010). Business Model Generation. Hoboken: Jon Wiley & Sons.
Silveira Junior, E., & Marnet, R. (2008). Patente N PI 0605010-7 A. Brasil.
Ward, A. (2007). Lean product and process development. Cambridge: Lean Enterprise Institute.
13
Yuh, J. (2000). Design And Control of Autonomous Underwater Robots: A Survey. Autonomous
Robots 8, 7-24.
Anda mungkin juga menyukai
- Marcelo de Almeida - Atividade 04Dokumen9 halamanMarcelo de Almeida - Atividade 04Marcelo de AlmeidaBelum ada peringkat
- Abordagem Neoclássica Da Administração-Decorrências Da Teoria Neoclássica Da AdministraçãoDokumen44 halamanAbordagem Neoclássica Da Administração-Decorrências Da Teoria Neoclássica Da AdministraçãokimadamsBelum ada peringkat
- Abordagem SociotécnicaDokumen7 halamanAbordagem SociotécnicajlmcarvalhoBelum ada peringkat
- Cap 1 - GDP - RozenfeldDokumen58 halamanCap 1 - GDP - RozenfeldLucas Magalhães TatagibaBelum ada peringkat
- Aula 11 ComprasDokumen14 halamanAula 11 ComprasfrahedlerBelum ada peringkat
- Currículo Integrado - Cristina DaviniDokumen10 halamanCurrículo Integrado - Cristina DavinicurriculoemacaodontoBelum ada peringkat
- Manual ExpertDokumen42 halamanManual ExpertFabiano Henrique Moreira100% (1)
- O Papel Estratégico Da Tecnologia Da Informação Nas MPEDokumen52 halamanO Papel Estratégico Da Tecnologia Da Informação Nas MPESamuel SilvaBelum ada peringkat
- NBR ISO 9002 - Sistemas Da Qualidade - Modelo para Garantia Da Qualidade em Produção, InstalaçãoDokumen11 halamanNBR ISO 9002 - Sistemas Da Qualidade - Modelo para Garantia Da Qualidade em Produção, InstalaçãoAlex SimoesBelum ada peringkat
- Instrumentação IndustrialDokumen90 halamanInstrumentação IndustrialAlysson Domingos100% (1)
- Documentacao Sobre InstrumentacaoDokumen141 halamanDocumentacao Sobre InstrumentacaoxandyghomesBelum ada peringkat
- Análise Preliminar de Risco PDFDokumen5 halamanAnálise Preliminar de Risco PDFEdnaldo G. LimaBelum ada peringkat
- Manual Gestao de Material em Almoxarifado Na Administracao Publica EstadualDokumen71 halamanManual Gestao de Material em Almoxarifado Na Administracao Publica EstadualDiego NogueiraBelum ada peringkat
- Os Sete Principios Do KaizenDokumen4 halamanOs Sete Principios Do KaizenVitor TavaresBelum ada peringkat
- MofDokumen218 halamanMofsargento_1636Belum ada peringkat
- Apostila SecretárioDokumen12 halamanApostila SecretárioLeonardo PradoBelum ada peringkat
- Apostila Automacao e Instrumentacao Industrial PDFDokumen114 halamanApostila Automacao e Instrumentacao Industrial PDFwalberr7Belum ada peringkat
- Manual QualidadeDokumen43 halamanManual QualidadeInês Cardoso100% (1)
- Encol - 17 - Qualidade Das Estr. de Concr. ArmDokumen84 halamanEncol - 17 - Qualidade Das Estr. de Concr. ArmPedro FernandesBelum ada peringkat
- MIG - Risco Operacional 30.10.2012 OTIMODokumen74 halamanMIG - Risco Operacional 30.10.2012 OTIMOJHBernardoBelum ada peringkat
- Gestao de Processos Simulados e Avs 1 PDFDokumen33 halamanGestao de Processos Simulados e Avs 1 PDFFrancis Canfield de SousaBelum ada peringkat
- Cultivar Máquinas 64Dokumen40 halamanCultivar Máquinas 64Marcelo FariasBelum ada peringkat
- E2PS - Sistemas de LimpezaDokumen8 halamanE2PS - Sistemas de LimpezaSandi SmithBelum ada peringkat
- 2733 8973 1 PBDokumen16 halaman2733 8973 1 PBVinicius GomesBelum ada peringkat
- O Ponto de Partida ResesnhaDokumen3 halamanO Ponto de Partida ResesnhaPaulo Silva DjiBelum ada peringkat
- Fundamentos de Balanço de Massa - SlideDokumen24 halamanFundamentos de Balanço de Massa - SlideLeticia VasconcellosBelum ada peringkat
- Academia Ao Ar Livre, Catalogo Tecnico de ProdutosDokumen52 halamanAcademia Ao Ar Livre, Catalogo Tecnico de ProdutosPaulo Pereira da SilvaBelum ada peringkat
- TCC Desperdicio de Materiais PDFDokumen133 halamanTCC Desperdicio de Materiais PDFHalina SallesBelum ada peringkat
- Normas APA Tese MestradoDokumen42 halamanNormas APA Tese MestradoensinarepartilharBelum ada peringkat
- Manual Do APFDokumen19 halamanManual Do APFHaroldo LimaBelum ada peringkat