Anda mungkin juga menyukai
- Lth-Band Digital Filters Design and PropertiesDokumen2 halamanLth-Band Digital Filters Design and PropertiesHanna AbejoBelum ada peringkat
- Some Case Studies on Signal, Audio and Image Processing Using MatlabDari EverandSome Case Studies on Signal, Audio and Image Processing Using MatlabBelum ada peringkat
- 03 10 2015 PDFDokumen12 halaman03 10 2015 PDFRama ArdiansyahBelum ada peringkat
- Digital and Kalman Filtering: An Introduction to Discrete-Time Filtering and Optimum Linear Estimation, Second EditionDari EverandDigital and Kalman Filtering: An Introduction to Discrete-Time Filtering and Optimum Linear Estimation, Second EditionBelum ada peringkat
- Audio Sieving Using Signal FiltersDokumen19 halamanAudio Sieving Using Signal FiltersPiyush YadavBelum ada peringkat
- Design and Implementation of Chebyshev FiltersDokumen11 halamanDesign and Implementation of Chebyshev FiltersAbhiBelum ada peringkat
- Lab Tutorial on IIR Filters DesignDokumen8 halamanLab Tutorial on IIR Filters DesignhimBelum ada peringkat
- 18ee63 DSP Module-3Dokumen19 halaman18ee63 DSP Module-3Appasabgouda BiradarBelum ada peringkat
- Lab Sheet 6 Filter Design Using MATLAB: Lab Session 6.1: Implementation of Linear Phase FIR FilterDokumen15 halamanLab Sheet 6 Filter Design Using MATLAB: Lab Session 6.1: Implementation of Linear Phase FIR FilterSharmin RiniBelum ada peringkat
- Experiment 6 Implementation of LP Fir Filter For A Given SequenceDokumen25 halamanExperiment 6 Implementation of LP Fir Filter For A Given SequenceSrinivas SamalBelum ada peringkat
- DSP-5 (Iir) (S)Dokumen55 halamanDSP-5 (Iir) (S)Jyothi JoBelum ada peringkat
- EE3001 - Advanced Measurements: Digital FiltersDokumen38 halamanEE3001 - Advanced Measurements: Digital FilterssiamaeBelum ada peringkat
- Lab 7Dokumen5 halamanLab 7fahadsaeed93Belum ada peringkat
- Design and Comparison of Butterworth and Chebyshev Type-1 Low Pass Filter Using MatlabDokumen16 halamanDesign and Comparison of Butterworth and Chebyshev Type-1 Low Pass Filter Using MatlabResearch Cell: An International Journal of Engineering SciencesBelum ada peringkat
- DSP LAB of FilterDokumen3 halamanDSP LAB of FilterMujtaba FarrukhBelum ada peringkat
- Lab 5Dokumen3 halamanLab 5Sameera මලිත් WithanachchiBelum ada peringkat
- Lab 5. FIR & IIR Filters in Matlab: Filter DesignDokumen12 halamanLab 5. FIR & IIR Filters in Matlab: Filter DesignDrakshayaniMurgodBelum ada peringkat
- Pdf&rendition 1Dokumen5 halamanPdf&rendition 1Muqaddas WaqarBelum ada peringkat
- Question Bank ITDokumen20 halamanQuestion Bank ITSreejith GopiBelum ada peringkat
- UNIT-4 FinalDokumen70 halamanUNIT-4 FinalanandbabugopathotiBelum ada peringkat
- 2 - Higher-Order, Cascaded, Active Filters: ECE 6414: Continuous Time Filters (P. Allen) - Chapter 2 Page 2-1Dokumen36 halaman2 - Higher-Order, Cascaded, Active Filters: ECE 6414: Continuous Time Filters (P. Allen) - Chapter 2 Page 2-1Beigh Umair ZahoorBelum ada peringkat
- Under The Esteemed Guidance Of: (Supervisor) Assistant Professor, E.C.E Department Gitam, VisakhapatnamDokumen42 halamanUnder The Esteemed Guidance Of: (Supervisor) Assistant Professor, E.C.E Department Gitam, VisakhapatnamG Sankara raoBelum ada peringkat
- Design and Implementation of IIR FilterDokumen45 halamanDesign and Implementation of IIR FilterSaurabh Shukla67% (3)
- FIR FILTERS IMPLEMENTATION APPROACHES REPORTDokumen14 halamanFIR FILTERS IMPLEMENTATION APPROACHES REPORTH052 Rajesh Komaravalli ECEBelum ada peringkat
- IIR Digital Filtyttyer Structures Filter DesignDokumen35 halamanIIR Digital Filtyttyer Structures Filter DesignSiddarth MadanBelum ada peringkat
- High Speed and Low Power FPGA Implementation of FIR Filter For DSP ApplicationsDokumen10 halamanHigh Speed and Low Power FPGA Implementation of FIR Filter For DSP ApplicationslathavenkyBelum ada peringkat
- Didital FiltersDokumen65 halamanDidital FiltersDr.EZHILARASI PBelum ada peringkat
- MultiRate 2Dokumen178 halamanMultiRate 2IamINBelum ada peringkat
- National Taiwan University Term Paper on Notch FiltersDokumen43 halamanNational Taiwan University Term Paper on Notch Filtersanand248Belum ada peringkat
- Characterization of Phase Frequency Response of Four Analog Filter Approximation TechniquesDokumen3 halamanCharacterization of Phase Frequency Response of Four Analog Filter Approximation TechniquespalmerxBelum ada peringkat
- World's Largest Science, Technology & Medicine Open Access Book PublisherDokumen34 halamanWorld's Largest Science, Technology & Medicine Open Access Book PublisherAlex YangBelum ada peringkat
- Digital Filter DesigningDokumen6 halamanDigital Filter DesigningToalha TosrifBelum ada peringkat
- Chapter 10Dokumen8 halamanChapter 10Aldon JimenezBelum ada peringkat
- IIR Filters Presentation by Dr. M. MurugappanDokumen54 halamanIIR Filters Presentation by Dr. M. MurugappanAiran Tan100% (1)
- Filter Design Guide: A Guide to Analog to Digital Conversion and Ideal Filter ShapesDokumen17 halamanFilter Design Guide: A Guide to Analog to Digital Conversion and Ideal Filter ShapesAnonymous pS4LT2GJUSBelum ada peringkat
- FIR & IIR Filters DesignDokumen12 halamanFIR & IIR Filters DesignPreeti KatiyarBelum ada peringkat
- Chapter Five: Design of Digital FiltersDokumen53 halamanChapter Five: Design of Digital FiltersabdilkerimBelum ada peringkat
- Digital Signal Processing Lab Manual: Subject Code: ECE 3161Dokumen45 halamanDigital Signal Processing Lab Manual: Subject Code: ECE 3161Basudha PalBelum ada peringkat
- 5filter Design EquilizationDokumen11 halaman5filter Design EquilizationharithBelum ada peringkat
- Filtro Fir2Dokumen16 halamanFiltro Fir2DarWin VinueZaBelum ada peringkat
- Theory Report MajorDokumen27 halamanTheory Report MajorRajni GulatiBelum ada peringkat
- Finite Impulse Response (Fir) : ObjectivesDokumen9 halamanFinite Impulse Response (Fir) : ObjectivesAldon JimenezBelum ada peringkat
- E E 2 7 5 Lab: FIR & IIR Filters in MatlabDokumen11 halamanE E 2 7 5 Lab: FIR & IIR Filters in MatlabTapas MandalBelum ada peringkat
- My 9Dokumen4 halamanMy 9Prashanna YadavBelum ada peringkat
- Lab 5-Digital FilterDokumen10 halamanLab 5-Digital FilterEssa Al-KishtainiBelum ada peringkat
- Interpolated FIR Filter (MITRA)Dokumen8 halamanInterpolated FIR Filter (MITRA)Brandon HerreraBelum ada peringkat
- Iir 1Dokumen55 halamanIir 1Joyita BiswasBelum ada peringkat
- Performance Analysis of Different Inverse Filter Design TechniquesDokumen7 halamanPerformance Analysis of Different Inverse Filter Design TechniquesEditor IJSETBelum ada peringkat
- IIR Filters DesignDokumen44 halamanIIR Filters DesignSha Tu BolaBelum ada peringkat
- Finite Impulse ResponseDokumen6 halamanFinite Impulse ResponseYoga Putra PratamaBelum ada peringkat
- Name of Exp:: Design & Implementation of Finite Impulse Response (FIR) FilterDokumen4 halamanName of Exp:: Design & Implementation of Finite Impulse Response (FIR) FilterOmor Faruque AbirBelum ada peringkat
- TechnicalReview1977 1Dokumen34 halamanTechnicalReview1977 1mastelecentroBelum ada peringkat
- Digital Signal Processing: Unit-1 and 2: Discrete Fourier TransformsDokumen5 halamanDigital Signal Processing: Unit-1 and 2: Discrete Fourier TransformsjpsridharBelum ada peringkat
- Finite Impulse Response (FIR) Filter: Dr. Dur-e-Shahwar Kundi Lec-7Dokumen37 halamanFinite Impulse Response (FIR) Filter: Dr. Dur-e-Shahwar Kundi Lec-7UsamaKhalidBelum ada peringkat
- S32104006W+Likando Mubita+DSP2022Dokumen14 halamanS32104006W+Likando Mubita+DSP2022kaviyeluBelum ada peringkat
- Lab 5Dokumen5 halamanLab 5Katiuvelis Diaz RodriguezBelum ada peringkat
- Lab Report 2Dokumen10 halamanLab Report 2Muhammad Nabeel TayyabBelum ada peringkat
- IOSR JournalsDokumen9 halamanIOSR JournalsInternational Organization of Scientific Research (IOSR)Belum ada peringkat
- Signal Processing in MatlabDokumen39 halamanSignal Processing in MatlabnrameshmeBelum ada peringkat
- Vocabulary - 700 WordsDokumen24 halamanVocabulary - 700 WordsHanna AbejoBelum ada peringkat
- Construction ProceduresDokumen1 halamanConstruction ProceduresHanna AbejoBelum ada peringkat
- Docu For PCB DesignDokumen1 halamanDocu For PCB DesignHanna AbejoBelum ada peringkat
- Procedure in Hazard and Work AnalysisDokumen18 halamanProcedure in Hazard and Work AnalysisHanna Abejo100% (1)
- Digital Logic Gates ExperimentDokumen13 halamanDigital Logic Gates ExperimentHanna AbejoBelum ada peringkat
- Different Examples of HDLDokumen12 halamanDifferent Examples of HDLHanna Abejo0% (1)
- Experiment - Binary and Decimal NumbersDokumen6 halamanExperiment - Binary and Decimal NumbersHanna Abejo0% (1)
- ECG Sample ExperimentDokumen3 halamanECG Sample ExperimentHanna AbejoBelum ada peringkat
- Codes and CiphersDokumen23 halamanCodes and CiphersHanna AbejoBelum ada peringkat
- Unit1 DS PDFDokumen55 halamanUnit1 DS PDFKarthikeyan RamajayamBelum ada peringkat
- SiGe RF Front-End PerformanceDokumen6 halamanSiGe RF Front-End PerformancekimvirusBelum ada peringkat
- AN491 - Power Supply Rejection For Low-Jitter ClocksDokumen8 halamanAN491 - Power Supply Rejection For Low-Jitter ClocksJohanes SetiawanBelum ada peringkat
- PC Card Standard 8.0 Volume 4 Metaformat SpecificationDokumen144 halamanPC Card Standard 8.0 Volume 4 Metaformat SpecificationfilionpierBelum ada peringkat
- Motor j3 VVT A137 PDFDokumen206 halamanMotor j3 VVT A137 PDFzeabedu80% (5)
- ESS Product Introduction - ENDokumen63 halamanESS Product Introduction - ENGopi Laal Bahadur100% (1)
- WEG w22 Three Phase Motor Technical Australia New Zealand Market 50025541 BR - Mo - W22technical Catalogue - BSC Brochure English PDFDokumen40 halamanWEG w22 Three Phase Motor Technical Australia New Zealand Market 50025541 BR - Mo - W22technical Catalogue - BSC Brochure English PDFMohammad Mahdi BozorgzadehBelum ada peringkat
- Basics of VFDDokumen10 halamanBasics of VFDMubarak BashaBelum ada peringkat
- Vacuum Tube - WikipediaDokumen33 halamanVacuum Tube - WikipediaHenslsdkgaABelum ada peringkat
- ANDROID: A COMPLETE INTRO TO THE OPEN SOURCE MOBILE OSDokumen24 halamanANDROID: A COMPLETE INTRO TO THE OPEN SOURCE MOBILE OSHarsh GuptaBelum ada peringkat
- Manual MI 2893, MI 2892, MI 2885 - PowerMaster XT, Power Master, Master Q4 ANG Ver 1.2.2 20753179Dokumen242 halamanManual MI 2893, MI 2892, MI 2885 - PowerMaster XT, Power Master, Master Q4 ANG Ver 1.2.2 20753179Nhật Tân Nguyễn VănBelum ada peringkat
- 957 4 1 A 57607 ECAD VLSI Lab Manual PDFDokumen151 halaman957 4 1 A 57607 ECAD VLSI Lab Manual PDFBasava RajuBelum ada peringkat
- Fusealloy Fabrication Guidelines 2016Dokumen25 halamanFusealloy Fabrication Guidelines 2016Vitor Rigueira de GodoyBelum ada peringkat
- Multipath - Conf HITACHIDokumen3 halamanMultipath - Conf HITACHIBreno RodriguesBelum ada peringkat
- Cme2100 Quick Manual English v.3.0 0Dokumen59 halamanCme2100 Quick Manual English v.3.0 0mgugiBelum ada peringkat
- Zc300 Specification SheetDokumen4 halamanZc300 Specification Sheetgroovey9040Belum ada peringkat
- Method Statement for Fire Protection Services InstallationDokumen45 halamanMethod Statement for Fire Protection Services InstallationMuhammad Farezon82% (11)
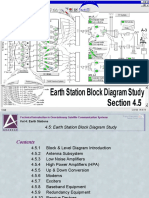
- Earth Station Block Diagram Study: Section 5Dokumen213 halamanEarth Station Block Diagram Study: Section 5Extreme DaysBelum ada peringkat
- 74VHCT139A: Dual 2 To 4 Decoder/DemultiplexerDokumen8 halaman74VHCT139A: Dual 2 To 4 Decoder/DemultiplexerCyro PereiraBelum ada peringkat
- 9210-224 - Sample - Question - Paper - v1-0, 2014Dokumen6 halaman9210-224 - Sample - Question - Paper - v1-0, 2014Anonymous emooAdrBelum ada peringkat
- Questions 6Dokumen3 halamanQuestions 6Bobeth TubigBelum ada peringkat
- XT5042 - Datasheet PDFDokumen2 halamanXT5042 - Datasheet PDFlabbasatyamBelum ada peringkat
- 74HC08Dokumen7 halaman74HC08Brian DoyleBelum ada peringkat
- Icom IC-2720H Instruction ManualDokumen96 halamanIcom IC-2720H Instruction ManualYayok S. AnggoroBelum ada peringkat
- Talexxengine Stark Lle Guide enDokumen53 halamanTalexxengine Stark Lle Guide enMihai ConstantinescuBelum ada peringkat
- Operating Systems From 0 To 1 PDFDokumen311 halamanOperating Systems From 0 To 1 PDF3charlie52Belum ada peringkat
- Ohms LawDokumen5 halamanOhms LawBEED 2-E JALANDOON, PAUL DAVID B.Belum ada peringkat
- Circles ResumeDokumen2 halamanCircles ResumeMichael SunseriBelum ada peringkat
- DFFHMDokumen9 halamanDFFHMyaswanthBelum ada peringkat
- 5.2.1.7 Lab - Viewing The Switch MAC Address TableDokumen4 halaman5.2.1.7 Lab - Viewing The Switch MAC Address TableMarc WallinBelum ada peringkat
- Is 15652Dokumen3 halamanIs 15652IshanBelum ada peringkat
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsDari EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsBelum ada peringkat
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationDari EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationBelum ada peringkat
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireDari EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireBelum ada peringkat
- Computer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)Dari EverandComputer Networking: The Complete Guide to Understanding Wireless Technology, Network Security, Computer Architecture and Communications Systems (Including Cisco, CCNA and CCENT)Belum ada peringkat
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Dari EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Penilaian: 4 dari 5 bintang4/5 (4)
- CEH Certified Ethical Hacker Practice Exams, Third EditionDari EverandCEH Certified Ethical Hacker Practice Exams, Third EditionBelum ada peringkat
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamDari EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamPenilaian: 5 dari 5 bintang5/5 (1)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionDari EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionPenilaian: 5 dari 5 bintang5/5 (4)
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityDari EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityPenilaian: 4.5 dari 5 bintang4.5/5 (13)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsDari EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsBelum ada peringkat
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxDari EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxPenilaian: 4.5 dari 5 bintang4.5/5 (67)
- Amazon Web Services (AWS) Interview Questions and AnswersDari EverandAmazon Web Services (AWS) Interview Questions and AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- ITIL 4: Digital and IT strategy: Reference and study guideDari EverandITIL 4: Digital and IT strategy: Reference and study guidePenilaian: 5 dari 5 bintang5/5 (1)
- The CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersDari EverandThe CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersBelum ada peringkat
- ITIL 4: Create, Deliver and Support: Reference and study guideDari EverandITIL 4: Create, Deliver and Support: Reference and study guideBelum ada peringkat
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationDari EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationPenilaian: 5 dari 5 bintang5/5 (2)
- A Practical Guide Wireshark ForensicsDari EverandA Practical Guide Wireshark ForensicsPenilaian: 5 dari 5 bintang5/5 (4)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamDari EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamBelum ada peringkat
- ITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationDari EverandITIL® 4 Direct, Plan and Improve (DPI): Your companion to the ITIL 4 Managing Professional and Strategic Leader DPI certificationBelum ada peringkat
- Hands-On Network Programming with C: Learn socket programming in C and write secure and optimized network codeDari EverandHands-On Network Programming with C: Learn socket programming in C and write secure and optimized network codePenilaian: 5 dari 5 bintang5/5 (1)
- Introduction to Cyber-Warfare: A Multidisciplinary ApproachDari EverandIntroduction to Cyber-Warfare: A Multidisciplinary ApproachPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- CCST Cisco Certified Support Technician Study Guide: Networking ExamDari EverandCCST Cisco Certified Support Technician Study Guide: Networking ExamBelum ada peringkat
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeDari EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticePenilaian: 5 dari 5 bintang5/5 (1)