Anda mungkin juga menyukai
- Lecture01 ROC LogisticDokumen12 halamanLecture01 ROC LogisticRegina YunisaBelum ada peringkat
- Lecture01 ROC LogisticDokumen12 halamanLecture01 ROC LogisticRegina YunisaBelum ada peringkat
- Examples of Image Analysis Using ImageJDokumen2 halamanExamples of Image Analysis Using ImageJMarcela Morales GeddaBelum ada peringkat
- Introduction To Data MiningDokumen8 halamanIntroduction To Data MiningRegina YunisaBelum ada peringkat
- Lecture01 ROC LogisticDokumen12 halamanLecture01 ROC LogisticRegina YunisaBelum ada peringkat
- Ip12 SegmentationDokumen38 halamanIp12 Segmentationyatendra kashyapBelum ada peringkat
- CH 4Dokumen31 halamanCH 4Regina YunisaBelum ada peringkat
- Link Kinetik ModelingDokumen1 halamanLink Kinetik ModelingreginayunisaBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Skills in Mathematics Trigonometry For JEE Main and Advanced 2022Dokumen399 halamanSkills in Mathematics Trigonometry For JEE Main and Advanced 2022Harshil Nagwani100% (3)
- Devc Unit-III, IV & V Question BankDokumen2 halamanDevc Unit-III, IV & V Question BankPavani KaramalaBelum ada peringkat
- Math 8 exam questionsDokumen5 halamanMath 8 exam questionsRoella Mae Tudias Alod67% (3)
- AssessmentDokumen3 halamanAssessmentLaurice CabotajeBelum ada peringkat
- Particle motion and dynamics problemsDokumen2 halamanParticle motion and dynamics problemsmhrdd222Belum ada peringkat
- The Theorems of Ceva and Menelaus: OutlineDokumen7 halamanThe Theorems of Ceva and Menelaus: Outlineمحمد حسن أبو حذيفةBelum ada peringkat
- P6.1 VectorsDokumen29 halamanP6.1 Vectorstravisclark123123Belum ada peringkat
- Blue Print: Sa-Ii (Ix) : Mathematics.: MensurationDokumen19 halamanBlue Print: Sa-Ii (Ix) : Mathematics.: Mensurationapi-243565143Belum ada peringkat
- Latihan Coordinate Geometry Form 4Dokumen26 halamanLatihan Coordinate Geometry Form 4Nur Saida Syamim FauziBelum ada peringkat
- BMEN 525 Course NotesDokumen52 halamanBMEN 525 Course NotesSuraj_73Belum ada peringkat
- CubopaperDokumen16 halamanCubopaperapi-281827073Belum ada peringkat
- 2011 Jan P1 QPDokumen28 halaman2011 Jan P1 QPMuhammad UsmanBelum ada peringkat
- Forces in PhysicsDokumen8 halamanForces in PhysicsDrito GarciaBelum ada peringkat
- Revision Planner 9th MathsDokumen2 halamanRevision Planner 9th MathsMamata JalendraBelum ada peringkat
- 10 Circle Revision Notes Getmarks AppDokumen74 halaman10 Circle Revision Notes Getmarks Appsaitamathelegend7Belum ada peringkat
- Brazilian Olympiad Paper PDFDokumen38 halamanBrazilian Olympiad Paper PDFspsarathy100% (1)
- Summary of Basic 2D Constraint Solving: Introduction and ScopeDokumen6 halamanSummary of Basic 2D Constraint Solving: Introduction and ScopeMangesh JoshiBelum ada peringkat
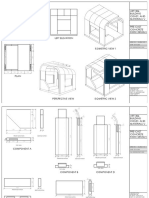
- ART 306 Building Materials V Pre-Cast Concrete Kiosk Design Const. andDokumen5 halamanART 306 Building Materials V Pre-Cast Concrete Kiosk Design Const. andAbhishek SoniBelum ada peringkat
- Std09 Maths EM 2Dokumen155 halamanStd09 Maths EM 2juli_naz100% (4)
- Summative-TEst Q1 4th m91011Dokumen1 halamanSummative-TEst Q1 4th m91011Sharmaine MedianeroBelum ada peringkat
- Assignment Sheet 1-AsymptotesDokumen1 halamanAssignment Sheet 1-AsymptotesRitu GoyalBelum ada peringkat
- Amm 01 2017 PDFDokumen100 halamanAmm 01 2017 PDFAnonymous 0Uc6FynqBelum ada peringkat
- Sample Exam For Midterm 1: Fall 2020 Physics XL 5A Jackie PauDokumen9 halamanSample Exam For Midterm 1: Fall 2020 Physics XL 5A Jackie PaujackblackBelum ada peringkat
- Trigonometry Homework: Find lengths and angles in right trianglesDokumen2 halamanTrigonometry Homework: Find lengths and angles in right trianglesMalyka KBelum ada peringkat
- Year 11 Easter Revision: Student Guide GCSE MathematicsDokumen8 halamanYear 11 Easter Revision: Student Guide GCSE Mathematicsroz50756Belum ada peringkat
- C2 Trigonometry - Arc Length and Sector AreaDokumen19 halamanC2 Trigonometry - Arc Length and Sector AreaIsmail WasiuBelum ada peringkat
- Maths Teaching Through Stories.2Dokumen35 halamanMaths Teaching Through Stories.2S.Kumar50% (2)
- Learning Geometry PDFDokumen2 halamanLearning Geometry PDFSaid BouzBelum ada peringkat
- Pre-Cal - Conic Sections and Other Graphs WorksheetDokumen3 halamanPre-Cal - Conic Sections and Other Graphs WorksheetFons Roxas-ChuaBelum ada peringkat
- Projectile Motion: Learning Activity Sheets (LAS)Dokumen6 halamanProjectile Motion: Learning Activity Sheets (LAS)Franz Eugene Almodiente100% (3)