Anda mungkin juga menyukai
- Prácticamec 101Dokumen2 halamanPrácticamec 101tetos90Belum ada peringkat
- Cuestiones ExamenesDokumen12 halamanCuestiones Examenestetos90Belum ada peringkat
- Sarai Rios Estudio Pieza SoldadaDokumen13 halamanSarai Rios Estudio Pieza Soldadatetos90Belum ada peringkat
- Cuidadocaballo PDFDokumen62 halamanCuidadocaballo PDFMiguel Villarroel Olano88% (8)
- Simbolos ElectronicosDokumen4 halamanSimbolos ElectronicosRubén Mamani0% (1)
- Practica Xilinx VHDLDokumen12 halamanPractica Xilinx VHDLJavier MateusBelum ada peringkat
- Manual XilinxDokumen15 halamanManual XilinxPakitoCachorrosBelum ada peringkat
- Cuestiones ExamenesDokumen12 halamanCuestiones Examenestetos90Belum ada peringkat
- Pepin MotorDokumen1 halamanPepin Motortetos90Belum ada peringkat
- Cálculos de caída de tensión en circuitos eléctricos de baja tensiónDokumen5 halamanCálculos de caída de tensión en circuitos eléctricos de baja tensiónAmonRohBelum ada peringkat
- Simbologia Europea PDFDokumen13 halamanSimbologia Europea PDFMiguel Angel Martinez Moreno75% (4)
- Norma Oficial de Abreviaturas, Símbolos y Números Usados en Planos Eléctricos (NOM-J-136-1970Dokumen37 halamanNorma Oficial de Abreviaturas, Símbolos y Números Usados en Planos Eléctricos (NOM-J-136-1970Christian Castro ReyesBelum ada peringkat
- Check ListDokumen2 halamanCheck Listtetos90Belum ada peringkat
- 09 Ledesma Redes NeuronalesDokumen50 halaman09 Ledesma Redes NeuronalesJuan AlvarezBelum ada peringkat
- 09 Ledesma Redes NeuronalesDokumen50 halaman09 Ledesma Redes NeuronalesJuan AlvarezBelum ada peringkat
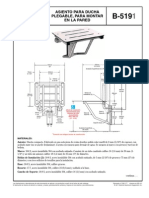
- B-5191 EsDokumen2 halamanB-5191 Estetos90Belum ada peringkat
- Proyecto GanaderiaDokumen177 halamanProyecto GanaderiaHelen JohnsonBelum ada peringkat
- I Tarea01Dokumen15 halamanI Tarea01kiaraBelum ada peringkat
- Etapas de Producción de Una EmpresaDokumen3 halamanEtapas de Producción de Una EmpresaGuillermo SamuelBelum ada peringkat
- Chacras Amazónicas - Guía para El Manejo de PlagasDokumen156 halamanChacras Amazónicas - Guía para El Manejo de PlagasCarreño Rangel Tania YamileBelum ada peringkat
- Trabajo Asignatura Codio 739Dokumen12 halamanTrabajo Asignatura Codio 739Emrique MedinaBelum ada peringkat
- La Nutrición Ensayo #4Dokumen1 halamanLa Nutrición Ensayo #4Yassira Lissette79% (19)
- AntropometríaDokumen17 halamanAntropometríaElthonBelum ada peringkat
- Leyes de Kepler Trabajo FinalDokumen11 halamanLeyes de Kepler Trabajo FinalChaim GriffinBelum ada peringkat
- Masaje Infantil MetamorficoDokumen9 halamanMasaje Infantil MetamorficoPurificación González100% (1)
- Pc1-Ejercicios de Clase ResueltosDokumen14 halamanPc1-Ejercicios de Clase ResueltosJhordy Maycol Rodas QuirozBelum ada peringkat
- ACABADOSDokumen10 halamanACABADOSJhon Arreaga AguilarBelum ada peringkat
- Analisis de 752Dokumen4 halamanAnalisis de 752Raul Nuñez BrantesBelum ada peringkat
- Discapacidad AuditivaDokumen12 halamanDiscapacidad AuditivaOrlando Huancas Gutierrez100% (1)
- RPSU-07 B - Informe Técnico Productora de Camarón Prochacras CIA. Ltda.Dokumen5 halamanRPSU-07 B - Informe Técnico Productora de Camarón Prochacras CIA. Ltda.luis Isaac StupiñanBelum ada peringkat
- Osa WoriwoDokumen7 halamanOsa Woriwocesar awo ogunda dioBelum ada peringkat
- PDC DistritalDokumen183 halamanPDC DistritalGuido QuiñonesBelum ada peringkat
- Nutricion ParenteralDokumen7 halamanNutricion ParenteralwilmerBelum ada peringkat
- Receta N°13Dokumen4 halamanReceta N°13Elvis Muñoz FernándezBelum ada peringkat
- LHdlHAL 04 El Protector de Paulie BookDokumen130 halamanLHdlHAL 04 El Protector de Paulie BookmelinaBelum ada peringkat
- Tratamiento antimalárico en pacientes con malaria en BonanzaDokumen69 halamanTratamiento antimalárico en pacientes con malaria en BonanzaCarlos Roberto Calderon DavilaBelum ada peringkat
- Proyecto de Maquina PropulsoraDokumen97 halamanProyecto de Maquina PropulsoradannyBelum ada peringkat
- Nomenclatura de FenotiposDokumen10 halamanNomenclatura de FenotiposEvelyn MoralesBelum ada peringkat
- Catalogo 22 Agosto 2018Dokumen87 halamanCatalogo 22 Agosto 2018José Luis Romero MelgarBelum ada peringkat
- Rocas Sedimentarias Malajevich 1CM15Dokumen6 halamanRocas Sedimentarias Malajevich 1CM15Sofia MalajevichBelum ada peringkat
- El Plan de La Salvacion LIBRODokumen72 halamanEl Plan de La Salvacion LIBROAriel Ramón Gerardo Paredes GarcíaBelum ada peringkat
- Psicología Aplicada A La Publicidad - (PG 1 - 50)Dokumen50 halamanPsicología Aplicada A La Publicidad - (PG 1 - 50)Ondina MoralesBelum ada peringkat
- PS Recocemos Los Tipos de Familia 26-04Dokumen8 halamanPS Recocemos Los Tipos de Familia 26-04Vicky ZorrillaBelum ada peringkat
- Curso Motores Fuera de BordaDokumen3 halamanCurso Motores Fuera de BordaHector Barra VergaraBelum ada peringkat
- (PROB) Fundamentos de Probabilidad (2 Ed - Martin Pliego)Dokumen357 halaman(PROB) Fundamentos de Probabilidad (2 Ed - Martin Pliego)Mercedes Barrachina100% (1)
- Plan de MantenimientoDokumen61 halamanPlan de MantenimientoEnder CabreraBelum ada peringkat