Anda mungkin juga menyukai
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- AuX 101Dokumen3 halamanAuX 101madaba723504100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- 33kv Abb GisDokumen21 halaman33kv Abb GisViresh ShaunakBelum ada peringkat
- Marko Rodin Coil, Steven Mark TPU, Tom Bearden MEG, Sweet VTA (SQM), Annis&Eberly GeneratorDokumen711 halamanMarko Rodin Coil, Steven Mark TPU, Tom Bearden MEG, Sweet VTA (SQM), Annis&Eberly GeneratorNiculae George Razvan100% (1)
- SandbanksDokumen9 halamanSandbanksVic ToguinzBelum ada peringkat
- Iac PDFDokumen13 halamanIac PDFbagus adhitiawarmanBelum ada peringkat
- 42 19Dokumen35 halaman42 19Yarlagadda Rama KrishnaBelum ada peringkat
- Analysis of Statistical Pathloss Models For Mobile CommunicationsDokumen4 halamanAnalysis of Statistical Pathloss Models For Mobile CommunicationsYarlagadda Rama KrishnaBelum ada peringkat
- Malpractice GuidelinesDokumen3 halamanMalpractice GuidelinesYarlagadda Rama KrishnaBelum ada peringkat
- Doubledegreeformat 2010Dokumen6 halamanDoubledegreeformat 2010Yarlagadda Rama KrishnaBelum ada peringkat
- Education VerificationDokumen2 halamanEducation VerificationYarlagadda Rama KrishnaBelum ada peringkat
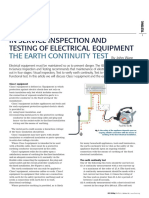
- In Service Inspection and Testing of Electrical Equipment: The Earth Continuity TestDokumen3 halamanIn Service Inspection and Testing of Electrical Equipment: The Earth Continuity TestAlliver SapitulaBelum ada peringkat
- Short Circuit Fault Calculator V62Dokumen6 halamanShort Circuit Fault Calculator V62Falah HasanBelum ada peringkat
- Difference Between Live Tank Type and Dead Tank Circuit BreakerDokumen2 halamanDifference Between Live Tank Type and Dead Tank Circuit BreakerHUDA ANTARBelum ada peringkat
- Oz964gn PDFDokumen14 halamanOz964gn PDFJesus E Lopez B100% (1)
- Ti SPC Psi 200 250CHGR 0210Dokumen13 halamanTi SPC Psi 200 250CHGR 0210vishnu kumar VyasBelum ada peringkat
- Isolating TransformerDokumen14 halamanIsolating Transformermaythamjasim7Belum ada peringkat
- Motor Rotor Teco DatosDokumen4 halamanMotor Rotor Teco DatoscenicercBelum ada peringkat
- Stella-F1 H555 Parts Catalog PDFDokumen92 halamanStella-F1 H555 Parts Catalog PDFtangocharliepdxBelum ada peringkat
- CONNECTWELL INDUSTRIES PVT. LTD. - D7, Phase 2, M.I.D.C., Dombivli (E), Maharashtra, India - 421 204Dokumen2 halamanCONNECTWELL INDUSTRIES PVT. LTD. - D7, Phase 2, M.I.D.C., Dombivli (E), Maharashtra, India - 421 204Daxesh ManiyarBelum ada peringkat
- MS202 (Specifications)Dokumen1 halamanMS202 (Specifications)hanryBelum ada peringkat
- Elite Nixie': Assembly Instructions and User GuideDokumen44 halamanElite Nixie': Assembly Instructions and User GuideWasawat JoongjaiBelum ada peringkat
- Appendix VI Diagram For Class I, Div. 1 Lighting InstallationDokumen3 halamanAppendix VI Diagram For Class I, Div. 1 Lighting InstallationcassianohcBelum ada peringkat
- TIP42 On SemiconductorDokumen1 halamanTIP42 On SemiconductorMario Raziel BerztructionBelum ada peringkat
- Star Delta Selection KitDokumen18 halamanStar Delta Selection KitMohammad AmerBelum ada peringkat
- Product Datasheet - Worm Geared Motor With Accessories-Motor PDFDokumen8 halamanProduct Datasheet - Worm Geared Motor With Accessories-Motor PDFRicardo CalmonBelum ada peringkat
- 3VM Interruptores Caja Moldeada MCCB 3VM 2015Dokumen92 halaman3VM Interruptores Caja Moldeada MCCB 3VM 2015AG CarlosBelum ada peringkat
- Bill of Materials - Sheet1Dokumen1 halamanBill of Materials - Sheet1api-598103816Belum ada peringkat
- Lokus K-1 ENGDokumen3 halamanLokus K-1 ENGVjekoslav ČerkezBelum ada peringkat
- UCI224G - Technical Data SheetDokumen8 halamanUCI224G - Technical Data SheetAsandoval12345Belum ada peringkat
- 05711673Dokumen12 halaman05711673Azman Mat HussinBelum ada peringkat
- 7.noload and Blocked Rotor Test On Singlephase Induction MotorDokumen5 halaman7.noload and Blocked Rotor Test On Singlephase Induction Motormandadi_sailesh100% (2)
- RF Based Home Security System: Presented byDokumen14 halamanRF Based Home Security System: Presented byAamirBelum ada peringkat
- DS-381 - 6 UniCharge 50Dokumen2 halamanDS-381 - 6 UniCharge 50Sajjad HussainBelum ada peringkat
- BQ Ulu BonodDokumen3 halamanBQ Ulu BonodKathleen GohBelum ada peringkat