Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Earth Science Research Plan Sample PDFDokumen1 halamanEarth Science Research Plan Sample PDFLạc Dương100% (1)
- Duong Van Lac-Research PlanDokumen2 halamanDuong Van Lac-Research PlanLạc DươngBelum ada peringkat
- LT24 User Manual Vo04Dokumen24 halamanLT24 User Manual Vo04Lạc DươngBelum ada peringkat
- Fulltext01 PDFDokumen24 halamanFulltext01 PDFLạc DươngBelum ada peringkat
- Paper and PresentationDokumen22 halamanPaper and PresentationLạc DươngBelum ada peringkat
- AS5045 Datasheet EN v1 PDFDokumen34 halamanAS5045 Datasheet EN v1 PDFLạc DươngBelum ada peringkat
- Control EnggDokumen58 halamanControl EnggBibekananda DattaBelum ada peringkat
- Characterization of Rubber Isolat orDokumen28 halamanCharacterization of Rubber Isolat orLạc DươngBelum ada peringkat
- Extract Pages From Tap1 CHM CHTK DLH&DKDokumen6 halamanExtract Pages From Tap1 CHM CHTK DLH&DKLạc DươngBelum ada peringkat
- Atmega16l8au PDFDokumen26 halamanAtmega16l8au PDFNelson AlmeidaBelum ada peringkat
- Quasi-Periodic Solutions Calculated With The Simple Shooting TechniqueDokumen12 halamanQuasi-Periodic Solutions Calculated With The Simple Shooting TechniqueLạc DươngBelum ada peringkat
- Bai Bao 4 PDFDokumen12 halamanBai Bao 4 PDFLạc DươngBelum ada peringkat
- Numerical Approaches To The Solution of Some Fractional Differential EquationsDokumen15 halamanNumerical Approaches To The Solution of Some Fractional Differential EquationsLạc DươngBelum ada peringkat
- Improper IntegralsDokumen8 halamanImproper IntegralsLạc Dương0% (1)
- For & Against by L.G. AlexanderDokumen79 halamanFor & Against by L.G. AlexanderIsmaeil Fazel100% (6)
- Windows PLC Programmer Manual - V04.00.000 (4408420002) - ENGDokumen52 halamanWindows PLC Programmer Manual - V04.00.000 (4408420002) - ENGLạc DươngBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Add Math Project Work 2013Dokumen33 halamanAdd Math Project Work 2013FrankieNgBelum ada peringkat
- Solutions of Csca 2020 by Sourav GogoiDokumen11 halamanSolutions of Csca 2020 by Sourav GogoiGyandeepBelum ada peringkat
- Ecs448 Chapter 5a ArchDokumen28 halamanEcs448 Chapter 5a Archdixn__Belum ada peringkat
- Airplane Wing Geometry and ConfigurationsDokumen7 halamanAirplane Wing Geometry and Configurationsh_mahdiBelum ada peringkat
- Study of Selected Petroleum Refining Residuals Industry StudyDokumen60 halamanStudy of Selected Petroleum Refining Residuals Industry StudyOsama AdilBelum ada peringkat
- Lab 1Dokumen4 halamanLab 1zakariaBelum ada peringkat
- Cad Module 2Dokumen3 halamanCad Module 2JithumonBelum ada peringkat
- 21 1/4 - 2,000 Ram Blowout Preventer Operation Manual Hydraulic Wedge Lock 2FZ54-14 FZ54-14Dokumen28 halaman21 1/4 - 2,000 Ram Blowout Preventer Operation Manual Hydraulic Wedge Lock 2FZ54-14 FZ54-14Mehdi SoltaniBelum ada peringkat
- On The Molecular Theories of Liquid Crystals by C. ZannoniDokumen221 halamanOn The Molecular Theories of Liquid Crystals by C. ZannoniclaudiozannoniBelum ada peringkat
- Leadership Quality ManagementDokumen8 halamanLeadership Quality Managementselinasimpson361Belum ada peringkat
- K.T. Chau, R.H.C. Wong, T.-f. Wong (Auth.), STAVROS K. KOURKOULIS (Eds.) - Fracture and Failure of Natural Building Stones_ Applications in the Restoration of Ancient Monuments-Springer Netherlands (2Dokumen581 halamanK.T. Chau, R.H.C. Wong, T.-f. Wong (Auth.), STAVROS K. KOURKOULIS (Eds.) - Fracture and Failure of Natural Building Stones_ Applications in the Restoration of Ancient Monuments-Springer Netherlands (2Daniel Ruperto CanoBelum ada peringkat
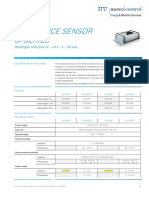
- DB Irradiance Sensor Si-Series en 20171016Dokumen3 halamanDB Irradiance Sensor Si-Series en 20171016Solar ProjectsBelum ada peringkat
- Geometry and Trigonometry PDFDokumen46 halamanGeometry and Trigonometry PDFnewspaperBelum ada peringkat
- Tracking Field OperationsDokumen9 halamanTracking Field OperationsWilberZangaBelum ada peringkat
- EXPERIMENT 3 OHMS LAW (1) GUY DERVILLE Cc7b49ceDokumen4 halamanEXPERIMENT 3 OHMS LAW (1) GUY DERVILLE Cc7b49ceDully CleverBelum ada peringkat
- Understanding & Programming The PIC16C84: A Beginners' Tutorial Jim BrownDokumen35 halamanUnderstanding & Programming The PIC16C84: A Beginners' Tutorial Jim BrownCornelius CampbellBelum ada peringkat
- Unit - I Dynamics of Electric Drives: Electrical Power Transmission SystemsDokumen4 halamanUnit - I Dynamics of Electric Drives: Electrical Power Transmission Systemsyemane gebremichalBelum ada peringkat
- Final Assignment CSE 425 Concept of Programming Language Section 7 Spring 2020 North South University Submitted To: Prof. Md. Ezharul Islam (Ezm)Dokumen27 halamanFinal Assignment CSE 425 Concept of Programming Language Section 7 Spring 2020 North South University Submitted To: Prof. Md. Ezharul Islam (Ezm)Avisheik Barua 1721158Belum ada peringkat
- Maintenance of 132 KV SwitchgearDokumen34 halamanMaintenance of 132 KV SwitchgearMuhammad Abdul Rauf100% (1)
- FireEdge FE400 PLC Interface Tech NoteDokumen2 halamanFireEdge FE400 PLC Interface Tech NoteTuyên VũBelum ada peringkat
- Semiconductor Devices and Circuits LaboratoryDokumen53 halamanSemiconductor Devices and Circuits LaboratoryKaryampudi RushendrababuBelum ada peringkat
- Product and Service DesignDokumen17 halamanProduct and Service DesignRahul KhannaBelum ada peringkat
- Engineering MeasurementsDokumen77 halamanEngineering MeasurementsFemi Prince0% (1)
- O Level Physics 2023-2025 ATP TipsDokumen7 halamanO Level Physics 2023-2025 ATP TipsAmy WolmesBelum ada peringkat
- Generalized CoordinatesDokumen8 halamanGeneralized CoordinatesJoshua WoodBelum ada peringkat
- 42re TechDokumen7 halaman42re Techmontrosepatriot100% (2)
- Chapter 6 - Ion ChannelsDokumen12 halamanChapter 6 - Ion ChannelsntghshrBelum ada peringkat
- Pay It ForwardDokumen4 halamanPay It ForwardAndrew FarrellBelum ada peringkat
- Structure of Atom - Class 11thDokumen38 halamanStructure of Atom - Class 11thAdil KhanBelum ada peringkat
- Eaton 10 Speed Service ManualDokumen186 halamanEaton 10 Speed Service ManualKeith McCann100% (1)