Anda mungkin juga menyukai
- 8 - Examen Periodo 3 OctavoDokumen5 halaman8 - Examen Periodo 3 OctavoOmarGarciaBelum ada peringkat
- Bcs1-Ejercicios FuncionesDokumen2 halamanBcs1-Ejercicios Funcionespepitoria_jmBelum ada peringkat
- MC Estructuras MetálicasDokumen16 halamanMC Estructuras MetálicasarcyperBelum ada peringkat
- Holley 2300Dokumen7 halamanHolley 2300Javier FloresBelum ada peringkat
- Topo II - Trazo de CarreterasDokumen16 halamanTopo II - Trazo de CarreterasfexxteBelum ada peringkat
- Delta de DiracDokumen3 halamanDelta de DiracJAIME_193Belum ada peringkat
- Numeros en La ComputadoraDokumen3 halamanNumeros en La ComputadoramasterrrrrrBelum ada peringkat
- Tipos de Flujos en Canales y TuberiasDokumen2 halamanTipos de Flujos en Canales y TuberiasLisseth Zorrilla ZárateBelum ada peringkat
- Circuito de AlimentacionDokumen30 halamanCircuito de AlimentacionAntonio Gomez NuñezBelum ada peringkat
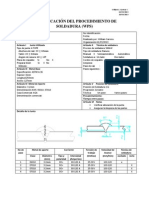
- Especificación Del Procedimiento de Soldadura (WPS) : William A. Carrera V. 18/03/2013 20/03/2013Dokumen4 halamanEspecificación Del Procedimiento de Soldadura (WPS) : William A. Carrera V. 18/03/2013 20/03/2013Andrés CarreraBelum ada peringkat
- Ejercicios-De-Sedimentacion 2Dokumen17 halamanEjercicios-De-Sedimentacion 2ROMAELBelum ada peringkat
- Sistema de Carga VWDokumen5 halamanSistema de Carga VWjesusconalepBelum ada peringkat
- Monografia de Lineas de InfluenciaDokumen12 halamanMonografia de Lineas de InfluenciaMabeli Mabe HGBelum ada peringkat
- Informe de Mediciones DirectasDokumen15 halamanInforme de Mediciones Directaskrlitox17100% (1)
- Mecanizado de MetalesDokumen7 halamanMecanizado de MetalesGabriel Omar ViscontiBelum ada peringkat
- Taller Practico No 1 Tercer AñoDokumen1 halamanTaller Practico No 1 Tercer AñoguyglesiasBelum ada peringkat
- Informe de Laboratorio 3Dokumen17 halamanInforme de Laboratorio 3VALERIA ZULUAGA HURTADOBelum ada peringkat
- Determinación de La Masa Molar de Un Líquido Fácilmente VaporizableDokumen2 halamanDeterminación de La Masa Molar de Un Líquido Fácilmente VaporizableManuel Alejandro Collazos Botero0% (1)
- Ondas MecanicasDokumen15 halamanOndas MecanicasHebert Alamo De La CruzBelum ada peringkat
- Pract 2-1-2018Dokumen4 halamanPract 2-1-2018Oscar TelleriaBelum ada peringkat
- Soluciones LiquidasDokumen13 halamanSoluciones LiquidasJhon Henry Silvestre Bazan100% (1)
- Informe Final Carreteras 2Dokumen13 halamanInforme Final Carreteras 2ARTUROBelum ada peringkat
- Problemas ACDokumen36 halamanProblemas ACMJ Armijo Saldaña100% (1)
- 1 SilicatosDokumen25 halaman1 SilicatosMichhael ParedesBelum ada peringkat
- 3 2 Desbalanceo Rotatorio y Cabeceo de Flechas Rotatorias y Elementos RotativosDokumen19 halaman3 2 Desbalanceo Rotatorio y Cabeceo de Flechas Rotatorias y Elementos RotativosPedroBelum ada peringkat
- Inv. QuimicaDokumen8 halamanInv. QuimicaMariijo QuMnoBelum ada peringkat
- Guia Instalacion RabbitDokumen12 halamanGuia Instalacion RabbitGarcía WillyBelum ada peringkat
- Relacion de Reduccion de VelocidadDokumen16 halamanRelacion de Reduccion de VelocidadYahaira GuerreroBelum ada peringkat
- Interruptor Transistorizado Activado Por LuzDokumen7 halamanInterruptor Transistorizado Activado Por LuzDuván Ricardo GuzmánBelum ada peringkat