Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
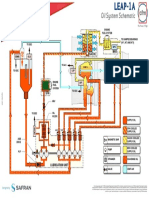
- LEAP-1A A3 79-Oil System Rev2.0Dokumen1 halamanLEAP-1A A3 79-Oil System Rev2.0SatishReddy100% (2)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- 737 - 800 QuestionsDokumen22 halaman737 - 800 QuestionsVivek SankpalBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Manado Airport STAR routesDokumen19 halamanManado Airport STAR routespedatiBelum ada peringkat
- 737 Systems SchematicsDokumen29 halaman737 Systems SchematicsZbor Zbor100% (2)
- GpsDokumen40 halamanGpssri041186% (7)
- JAR OPS maintenance organisation setupDokumen3 halamanJAR OPS maintenance organisation setupVinayBelum ada peringkat
- Getting To Grips With Fuel EconomyDokumen139 halamanGetting To Grips With Fuel EconomyAli100% (1)
- Shaheen Air International Engine Failure ProceduresDokumen3 halamanShaheen Air International Engine Failure ProceduresKhurram Naseem100% (1)
- Man Walks On Fucking Moon!!!!!!!!Dokumen1 halamanMan Walks On Fucking Moon!!!!!!!!marian_rBelum ada peringkat
- Wireless Sensor Networks ApplicationsDokumen8 halamanWireless Sensor Networks ApplicationsanantiaBelum ada peringkat
- 4825398Dokumen46 halaman4825398SatishReddyBelum ada peringkat
- DissertationDokumen2 halamanDissertationSatishReddyBelum ada peringkat
- Sample CV For Engineering Students - CV Formats / TemplatesDokumen4 halamanSample CV For Engineering Students - CV Formats / TemplatesSatishReddyBelum ada peringkat
- Plagiarism Scan Report: Content Checked For PlagiarismDokumen3 halamanPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyBelum ada peringkat
- PLAGIARISM SCAN REPORT SUMMARYDokumen3 halamanPLAGIARISM SCAN REPORT SUMMARYSatishReddyBelum ada peringkat
- PLAGIARISM SCAN REPORT SUMMARYDokumen3 halamanPLAGIARISM SCAN REPORT SUMMARYSatishReddyBelum ada peringkat
- Plagiarism Scan Report: Content Checked For PlagiarismDokumen3 halamanPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyBelum ada peringkat
- Evolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemDokumen7 halamanEvolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemSatishReddyBelum ada peringkat
- Plagiarism Scan Report: Content Checked For PlagiarismDokumen1 halamanPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyBelum ada peringkat
- Plagiarism Scan Report: Content Checked For PlagiarismDokumen3 halamanPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyBelum ada peringkat
- PLAGIARISM SCAN REPORT SUMMARYDokumen1 halamanPLAGIARISM SCAN REPORT SUMMARYSatishReddyBelum ada peringkat
- 1 C 0 DDokumen7 halaman1 C 0 DSatishReddyBelum ada peringkat
- Alliance Air 2015 technical circular indexDokumen1 halamanAlliance Air 2015 technical circular indexSatishReddyBelum ada peringkat
- Application of Wireless Sensor Networks To AircrafDokumen7 halamanApplication of Wireless Sensor Networks To AircrafSatishReddyBelum ada peringkat
- 04 Sensors AircraftDokumen3 halaman04 Sensors AircraftSatishReddyBelum ada peringkat
- 02 Outline ReportDokumen3 halaman02 Outline ReportSatishReddyBelum ada peringkat
- APA Style – Journal Article without DOIDokumen2 halamanAPA Style – Journal Article without DOISatishReddyBelum ada peringkat
- CAT A 11A MAY 2018 BLR Quick Revision NotesDokumen8 halamanCAT A 11A MAY 2018 BLR Quick Revision NotesSatishReddyBelum ada peringkat
- 06 of 2015Dokumen3 halaman06 of 2015SatishReddyBelum ada peringkat
- 07 of 2015Dokumen1 halaman07 of 2015SatishReddyBelum ada peringkat
- 03 Outline Evaluation Sheet 1Dokumen2 halaman03 Outline Evaluation Sheet 1SatishReddyBelum ada peringkat
- 1212Dokumen36 halaman1212Sumeet PandeyBelum ada peringkat
- 05 of 2015 (General)Dokumen1 halaman05 of 2015 (General)SatishReddyBelum ada peringkat
- Dgca Module 11 Part 06Dokumen19 halamanDgca Module 11 Part 06SatishReddyBelum ada peringkat
- Gmail - EASA approved training program (Airbus A 320 and B 737Dokumen1 halamanGmail - EASA approved training program (Airbus A 320 and B 737SatishReddyBelum ada peringkat
- 1212Dokumen36 halaman1212Sumeet PandeyBelum ada peringkat
- Module 3 QsDokumen44 halamanModule 3 QsSatishReddyBelum ada peringkat
- f7 Special PermitDokumen5 halamanf7 Special PermitSingh Vineet Kumar -Belum ada peringkat
- Fundamentals of Modern Aviation Chapter 1 SectionsDokumen8 halamanFundamentals of Modern Aviation Chapter 1 Sectionsascera100% (1)
- 1 2 2 P AircrafttrimdesignchallengeDokumen3 halaman1 2 2 P Aircrafttrimdesignchallengeapi-325609547Belum ada peringkat
- Advancements in Aerodynamic ResearchDokumen16 halamanAdvancements in Aerodynamic ResearchShija. SpBelum ada peringkat
- Workshop Assistant Technician ElectricalDokumen2 halamanWorkshop Assistant Technician ElectricalVasco SantosBelum ada peringkat
- NTSB ReportDokumen5 halamanNTSB ReportAlexandra Nicolas, joplinglobe.comBelum ada peringkat
- 1209 RAIM RAIM Don't Go Away PDFDokumen3 halaman1209 RAIM RAIM Don't Go Away PDFbft23100% (1)
- Sample Flight Plan: Crewbriefing Information PacketDokumen19 halamanSample Flight Plan: Crewbriefing Information PacketColdfire VargasBelum ada peringkat
- Anka UAVDokumen2 halamanAnka UAVmrbarlasBelum ada peringkat
- Ejemplo de Tortaza PDFDokumen61 halamanEjemplo de Tortaza PDFClaudia Teresa De JesúsBelum ada peringkat
- Rotorcraft Activity (SRS)Dokumen2 halamanRotorcraft Activity (SRS)Santiago RomeroBelum ada peringkat
- Trident ManualDokumen3 halamanTrident ManualrodolfoaznarBelum ada peringkat
- Powerful military helicopters for combat and transportDokumen3 halamanPowerful military helicopters for combat and transportjlewis_4Belum ada peringkat
- Aviation Week Technology 9 2013Dokumen84 halamanAviation Week Technology 9 2013Rich GarrBelum ada peringkat
- Louis Janos 401A Preflight ChecklistDokumen2 halamanLouis Janos 401A Preflight ChecklistOlga Lucia Duque QuijanoBelum ada peringkat
- F-5E/F Tiger IIDokumen518 halamanF-5E/F Tiger IIAerokosmonautika100% (4)
- Application for 1452-Scientist / Engineer-SC at VSSCDokumen2 halamanApplication for 1452-Scientist / Engineer-SC at VSSCHOD Aeronautical EngineeringBelum ada peringkat
- Aerodynamics SpreadsheetDokumen16 halamanAerodynamics SpreadsheetDHubert777Belum ada peringkat
- Syllabus Aviation Safety - Aircraft AirworthinessDokumen27 halamanSyllabus Aviation Safety - Aircraft AirworthinessirbasukirahardjocesBelum ada peringkat
- Pa31 Normal ProceduresDokumen9 halamanPa31 Normal ProceduresIvan OggeroBelum ada peringkat
- NASA Facts Shuttle Carrier Aircraft (SCA)Dokumen3 halamanNASA Facts Shuttle Carrier Aircraft (SCA)Bob AndrepontBelum ada peringkat
- Computational Benchmark of Commercial Fluid-Structure Interaction Software For Aeroelastic ApplicationsDokumen16 halamanComputational Benchmark of Commercial Fluid-Structure Interaction Software For Aeroelastic ApplicationsNicholas GiannelisBelum ada peringkat
- Rakesh Sharma Chandrayaan Satellite Information and Pic 1 Page EachDokumen2 halamanRakesh Sharma Chandrayaan Satellite Information and Pic 1 Page EachJasvinder SinghBelum ada peringkat