Anda mungkin juga menyukai
- The Load Current Waveform Is Continuous When The Delay Angle WhereDokumen33 halamanThe Load Current Waveform Is Continuous When The Delay Angle WhereMichael Adu-boahenBelum ada peringkat
- Geng4402 - Assignment 2: Question 1 - Nyquist Plot/Frequency Response PerformanceDokumen9 halamanGeng4402 - Assignment 2: Question 1 - Nyquist Plot/Frequency Response PerformanceangelosoutiBelum ada peringkat
- Gas Dynamics and Jet Propulsion PDFDokumen49 halamanGas Dynamics and Jet Propulsion PDFdass143143Belum ada peringkat
- Mathematical Tables: Tables of in G [z] for Complex ArgumentDari EverandMathematical Tables: Tables of in G [z] for Complex ArgumentBelum ada peringkat
- Ssdfeasd SdfeeDokumen63 halamanSsdfeasd SdfeeSethra SenBelum ada peringkat
- Control Systems 2Dokumen18 halamanControl Systems 2Sengottu VelusamyBelum ada peringkat
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Dari EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Belum ada peringkat
- Class Test - 2016: Electrical EngineeringDokumen9 halamanClass Test - 2016: Electrical EngineeringarunBelum ada peringkat
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Dari EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Belum ada peringkat
- U U U P T: Quick Visit To Bernoulli LandDokumen9 halamanU U U P T: Quick Visit To Bernoulli LandAkash SodhaBelum ada peringkat
- 2nd ASSIGNMENTDokumen15 halaman2nd ASSIGNMENTNazenin GüreBelum ada peringkat
- Ten-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesDari EverandTen-Decimal Tables of the Logarithms of Complex Numbers and for the Transformation from Cartesian to Polar Coordinates: Volume 33 in Mathematical Tables SeriesBelum ada peringkat
- Control SystemsDokumen18 halamanControl SystemsSengottu VelusamyBelum ada peringkat
- Mathematical Formulas for Economics and Business: A Simple IntroductionDari EverandMathematical Formulas for Economics and Business: A Simple IntroductionPenilaian: 4 dari 5 bintang4/5 (4)
- Control Por Computador: January 15, 2014Dokumen24 halamanControl Por Computador: January 15, 2014turbodilanBelum ada peringkat
- N-R BasicsDokumen46 halamanN-R BasicsHossain 'Soroosh' MohammadiBelum ada peringkat
- Ejercicios DSCDokumen39 halamanEjercicios DSCFreyley LeyvaBelum ada peringkat
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsDari EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsBelum ada peringkat
- EE 4343/5329 - Control System Design Project: EE 4343/5329 Homepage EE 4343/5329 Course OutlineDokumen14 halamanEE 4343/5329 - Control System Design Project: EE 4343/5329 Homepage EE 4343/5329 Course OutlineAkmaral NauryzgalievaBelum ada peringkat
- Full-Wave Controlled Rectifier RL Load (Continuous Mode)Dokumen6 halamanFull-Wave Controlled Rectifier RL Load (Continuous Mode)hamza abdo mohamoud100% (1)
- Extinction Probability For Queues and MartingalesDokumen27 halamanExtinction Probability For Queues and MartingalesmvamsipBelum ada peringkat
- Thin Airfoil TheoryDokumen10 halamanThin Airfoil TheoryAli Al-hamalyBelum ada peringkat
- Frequency Responce Analysis - by Kenil JaganiDokumen41 halamanFrequency Responce Analysis - by Kenil Jaganikeniljagani513Belum ada peringkat
- Ee602 Ac CircuitDokumen26 halamanEe602 Ac CircuitArryshah DahmiaBelum ada peringkat
- Super Buffer Design Driving Large Capacitive Loads: Prepared byDokumen14 halamanSuper Buffer Design Driving Large Capacitive Loads: Prepared byTamil SelvanBelum ada peringkat
- Frequency-Domain Analysis of Dynamic SystemsDokumen27 halamanFrequency-Domain Analysis of Dynamic SystemsmoomeejeeBelum ada peringkat
- Power System AnalysisDokumen33 halamanPower System AnalysisAnikendu MaitraBelum ada peringkat
- Time Response AnalysisDokumen151 halamanTime Response AnalysisTushar GuptaBelum ada peringkat
- Time Response of A Second Order Mechanical SystemDokumen14 halamanTime Response of A Second Order Mechanical SystemRiderBelum ada peringkat
- ∂ N ∂ T ∂ ∂ T Ηρdv+ Ηρ ⃗V ⋅ D ⃗ A: Derivation Of The Energy EquationDokumen4 halaman∂ N ∂ T ∂ ∂ T Ηρdv+ Ηρ ⃗V ⋅ D ⃗ A: Derivation Of The Energy EquationJaydee LuceroBelum ada peringkat
- A Sufficient Condition For Entrainment of A Van-der-Pol Oscillator Resistively Coupled To A Fixed Voltage InputDokumen8 halamanA Sufficient Condition For Entrainment of A Van-der-Pol Oscillator Resistively Coupled To A Fixed Voltage InputmalaysiatotoBelum ada peringkat
- Power Flow Analysis: Newton-Raphson IterationDokumen27 halamanPower Flow Analysis: Newton-Raphson IterationBayram YeterBelum ada peringkat
- Part 1 - Physics: L B A G 2Dokumen7 halamanPart 1 - Physics: L B A G 2bindaaz301Belum ada peringkat
- 1 Alternating Current (AC) Circuits 1.1 in Circuit AnalysisDokumen45 halaman1 Alternating Current (AC) Circuits 1.1 in Circuit Analysissodapop1999Belum ada peringkat
- Problems in Chapter 5 (Control Volume Analysis) : V AnduDokumen5 halamanProblems in Chapter 5 (Control Volume Analysis) : V AnduZul ZolkopliBelum ada peringkat
- Forced Damped VibrationsDokumen7 halamanForced Damped VibrationskalpanaadhiBelum ada peringkat
- Assignment 10 SolutionsDokumen6 halamanAssignment 10 SolutionsAditiBelum ada peringkat
- Lab Report 1Dokumen31 halamanLab Report 1Kristi GadeshiBelum ada peringkat
- Fixed Bed ReactorDokumen43 halamanFixed Bed ReactorMaher Al-busaidi100% (2)
- Solution Manual - Control Systems by GopalDokumen0 halamanSolution Manual - Control Systems by Gopalsaggu199185% (27)
- Fizika1 - Formule Za IzpitDokumen2 halamanFizika1 - Formule Za Izpitjoks1mBelum ada peringkat
- Notes 1 - Transmission Line TheoryDokumen82 halamanNotes 1 - Transmission Line TheoryJaime MendozaBelum ada peringkat
- Alternative Current Theory - EDokumen12 halamanAlternative Current Theory - Ethinkiit100% (3)
- ELEC4410 Control System Design Revision NotesDokumen10 halamanELEC4410 Control System Design Revision Notescjman404Belum ada peringkat
- C2 Sdof2 PDFDokumen20 halamanC2 Sdof2 PDFArThur BangunBelum ada peringkat
- Solutions All MOCK Tests - EEDokumen64 halamanSolutions All MOCK Tests - EEsamg27Belum ada peringkat
- Some Past Exam Problems in Control Systems - Part 2Dokumen5 halamanSome Past Exam Problems in Control Systems - Part 2vigneshBelum ada peringkat
- Webnotes Lecture 10 Sinusoidal Steady State 2013Dokumen24 halamanWebnotes Lecture 10 Sinusoidal Steady State 2013my009.tkBelum ada peringkat
- Lecture - 11 - Second LawDokumen10 halamanLecture - 11 - Second LawMihai MirceaBelum ada peringkat
- A New Direction For Roadway Safety Sign ProductionDokumen4 halamanA New Direction For Roadway Safety Sign ProductionNAGU2009Belum ada peringkat
- Dasdfwetfrehttt HGHGGGGGGGGGGGGGGGGGGGF Te5rt45657Dokumen1 halamanDasdfwetfrehttt HGHGGGGGGGGGGGGGGGGGGGF Te5rt45657NAGU2009Belum ada peringkat
- Zadewqytagutol908Poi /.jpoi' HkggfasdgbfhnvgDokumen1 halamanZadewqytagutol908Poi /.jpoi' HkggfasdgbfhnvgNAGU2009Belum ada peringkat
- ReadmeDokumen1 halamanReadmeNAGU2009Belum ada peringkat
- Anna Univ Part Time Mech SylabusDokumen69 halamanAnna Univ Part Time Mech SylabusmayilsamythangarajuBelum ada peringkat
- ProductsDokumen1 halamanProductsNAGU2009Belum ada peringkat
- EntoYau Softcam2Dokumen10 halamanEntoYau Softcam2NAGU2009Belum ada peringkat
- New Microqsoft Word DocumentDokumen1 halamanNew Microqsoft Word DocumentNAGU2009Belum ada peringkat
- Sdsfddsfdfrtrgdsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttdsadesadDokumen1 halamanSdsfddsfdfrtrgdsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttdsadesadNAGU2009Belum ada peringkat
- Adwre Dsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttfdefdgfdgDokumen1 halamanAdwre Dsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttfdefdgfdgNAGU2009Belum ada peringkat
- WWW SsssDokumen1 halamanWWW SsssNAGU2009Belum ada peringkat
- Adwre Dsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttfdefdgfdgDokumen1 halamanAdwre Dsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttfdefdgfdgNAGU2009Belum ada peringkat
- Dsdsdsdssdasdsddsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttDokumen1 halamanDsdsdsdssdasdsddsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttNAGU2009Belum ada peringkat
- Dsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttghgjhjhjDokumen1 halamanDsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttghgjhjhjNAGU2009Belum ada peringkat
- VocabulaWry TermDokumen3 halamanVocabulaWry TermNAGU2009Belum ada peringkat
- Dsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttscscsdvfdgfdhgfDokumen1 halamanDsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttscscsdvfdgfdhgfNAGU2009Belum ada peringkat
- Sdasdsddsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttDokumen1 halamanSdasdsddsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttNAGU2009Belum ada peringkat
- Dsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttDokumen1 halamanDsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttNAGU2009Belum ada peringkat
- Worrrrrd DocumentDokumen1 halamanWorrrrrd DocumentNAGU2009Belum ada peringkat
- Dsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttdsadesadDokumen1 halamanDsaeafxd Trd45Edc YtttttttttttttttttttttttttttttttdsadesadNAGU2009Belum ada peringkat
- Vocabulary TeDokumen2 halamanVocabulary TeNAGU2009Belum ada peringkat
- Vocabulary TermDokumen4 halamanVocabulary TermNAGU2009Belum ada peringkat
- Vocabulary TeDokumen2 halamanVocabulary TeNAGU2009Belum ada peringkat
- Word DoementDokumen1 halamanWord DoementNAGU2009Belum ada peringkat
- In T RuctionDokumen1 halamanIn T RuctionNAGU2009Belum ada peringkat
- Tamil SoldDokumen1 halamanTamil SoldNAGU2009Belum ada peringkat
- Word DocumAentDokumen1 halamanWord DocumAentNAGU2009Belum ada peringkat
- Design Procedure of Gear Box For Automobile and Machine ToolsDokumen10 halamanDesign Procedure of Gear Box For Automobile and Machine ToolsNAGU20090% (1)
- HT 2 Marks 2014Dokumen14 halamanHT 2 Marks 2014NAGU2009Belum ada peringkat
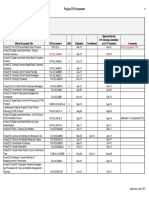
- Approved Project 25 StandardsDokumen5 halamanApproved Project 25 StandardsepidavriosBelum ada peringkat
- Maths All FormulasDokumen5 halamanMaths All FormulasVishnuBelum ada peringkat
- Zest O CorporationDokumen21 halamanZest O CorporationJhamane Chan53% (15)
- Lecture5 PDE 2016Dokumen22 halamanLecture5 PDE 2016isele1977Belum ada peringkat
- YellowstoneDokumen1 halamanYellowstoneOana GalbenuBelum ada peringkat
- Manual Nice9000v A04Dokumen151 halamanManual Nice9000v A04hoang tamBelum ada peringkat
- Earth Sciences Notes Csir-Ugc Net JRFDokumen57 halamanEarth Sciences Notes Csir-Ugc Net JRFmanas773Belum ada peringkat
- Mini-Case 1 Ppe AnswerDokumen11 halamanMini-Case 1 Ppe Answeryu choong100% (2)
- History of Flash Part - 2Dokumen7 halamanHistory of Flash Part - 2YOGESHWER NATH SINGHBelum ada peringkat
- Fret Position Calculator - StewmacDokumen1 halamanFret Position Calculator - StewmacJuan Pablo Sepulveda SierraBelum ada peringkat
- Exercise 9 Two Factor Factorial Experiments and Derivation of Expected Mean SquaresDokumen14 halamanExercise 9 Two Factor Factorial Experiments and Derivation of Expected Mean SquaresHasmaye PintoBelum ada peringkat
- Chapter 10 - The Mature ErythrocyteDokumen55 halamanChapter 10 - The Mature ErythrocyteSultan AlexandruBelum ada peringkat
- Index PDFDokumen159 halamanIndex PDFHüseyin IşlakBelum ada peringkat
- 04 SAMSS 005 Check ValvesDokumen9 halaman04 SAMSS 005 Check ValvesShino UlahannanBelum ada peringkat
- Maha Shivratri: (Shiv Avtaran, Incarnation of God)Dokumen4 halamanMaha Shivratri: (Shiv Avtaran, Incarnation of God)Varsha RoyBelum ada peringkat
- Aircraft Design Course PhillStocking 4.2Dokumen48 halamanAircraft Design Course PhillStocking 4.2ugurugur1982Belum ada peringkat
- Generalized Anxiety DisorderDokumen24 halamanGeneralized Anxiety DisorderEula Angelica OcoBelum ada peringkat
- Chapter 5 AGVDokumen76 halamanChapter 5 AGVQuỳnh NguyễnBelum ada peringkat
- Frontinus - Water Management of RomeDokumen68 halamanFrontinus - Water Management of RomezElfmanBelum ada peringkat
- Final TestDokumen10 halamanFinal TestbennyBelum ada peringkat
- Assignment 4 SolutionsDokumen9 halamanAssignment 4 SolutionsNengke Lin100% (2)
- Easergy PS100 48VDC Power SupplyDokumen2 halamanEasergy PS100 48VDC Power SupplyRichard SyBelum ada peringkat
- Full Download Short Term Financial Management 3rd Edition Maness Test BankDokumen35 halamanFull Download Short Term Financial Management 3rd Edition Maness Test Bankcimanfavoriw100% (31)
- Module in Pe 103Dokumen79 halamanModule in Pe 103Kym Dacudao100% (1)
- Disectie AnatomieDokumen908 halamanDisectie AnatomieMircea SimionBelum ada peringkat
- Future AncestorsDokumen44 halamanFuture AncestorsAlex100% (1)
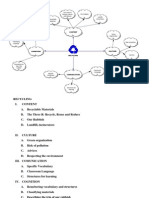
- Recycling Mind MapDokumen2 halamanRecycling Mind Mapmsole124100% (1)
- ReviewerDokumen3 halamanReviewerKristine SantominBelum ada peringkat
- All Pop SongsDokumen53 halamanAll Pop SongsMadeleneQuiogueBelum ada peringkat
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesDari EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesPenilaian: 4.5 dari 5 bintang4.5/5 (21)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsDari EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- A Pathway to Decarbonise the Shipping Sector by 2050Dari EverandA Pathway to Decarbonise the Shipping Sector by 2050Belum ada peringkat
- Introduction to Power System ProtectionDari EverandIntroduction to Power System ProtectionPenilaian: 5 dari 5 bintang5/5 (1)
- Guidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisDari EverandGuidelines for Initiating Events and Independent Protection Layers in Layer of Protection AnalysisPenilaian: 5 dari 5 bintang5/5 (1)
- Fire on the Horizon: The Untold Story of the Gulf Oil DisasterDari EverandFire on the Horizon: The Untold Story of the Gulf Oil DisasterBelum ada peringkat
- Shorting the Grid: The Hidden Fragility of Our Electric GridDari EverandShorting the Grid: The Hidden Fragility of Our Electric GridPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialDari EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialBelum ada peringkat
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceDari EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceBelum ada peringkat
- Nuclear Energy in the 21st Century: World Nuclear University PressDari EverandNuclear Energy in the 21st Century: World Nuclear University PressPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsDari EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsBelum ada peringkat
- Practical Power Distribution for IndustryDari EverandPractical Power Distribution for IndustryPenilaian: 2.5 dari 5 bintang2.5/5 (2)
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsDari EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsBelum ada peringkat
- Workbook to Accompany Maintenance & Reliability Best PracticesDari EverandWorkbook to Accompany Maintenance & Reliability Best PracticesPenilaian: 3.5 dari 5 bintang3.5/5 (3)
- Handbook on Battery Energy Storage SystemDari EverandHandbook on Battery Energy Storage SystemPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Dari EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977Belum ada peringkat
- Heat Transfer Engineering: Fundamentals and TechniquesDari EverandHeat Transfer Engineering: Fundamentals and TechniquesPenilaian: 4 dari 5 bintang4/5 (1)
- Renewable Energy: A Very Short IntroductionDari EverandRenewable Energy: A Very Short IntroductionPenilaian: 4.5 dari 5 bintang4.5/5 (12)
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerDari EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerBelum ada peringkat
- A Complete Guide to Safety Officer Interview Questions and AnswersDari EverandA Complete Guide to Safety Officer Interview Questions and AnswersPenilaian: 4 dari 5 bintang4/5 (1)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentDari EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentPenilaian: 4.5 dari 5 bintang4.5/5 (21)
- Global Landscape of Renewable Energy FinanceDari EverandGlobal Landscape of Renewable Energy FinanceBelum ada peringkat
- Practical Reservoir Engineering and CharacterizationDari EverandPractical Reservoir Engineering and CharacterizationPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- Guidelines for Auditing Process Safety Management SystemsDari EverandGuidelines for Auditing Process Safety Management SystemsBelum ada peringkat
- Rules of Thumb for Maintenance and Reliability EngineersDari EverandRules of Thumb for Maintenance and Reliability EngineersPenilaian: 4.5 dari 5 bintang4.5/5 (12)
- Renewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksDari EverandRenewable Energy Sources - Wind, Solar and Hydro Energy Revised Edition : Environment Books for Kids | Children's Environment BooksBelum ada peringkat






![Mathematical Tables: Tables of in G [z] for Complex Argument](https://imgv2-2-f.scribdassets.com/img/word_document/282615796/149x198/febb728e8d/1699542561?v=1)