Anda mungkin juga menyukai
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- EMFT BookDokumen203 halamanEMFT Booksankalani2003Belum ada peringkat
- JNTUK - DAP - Proposed Course Structure and Syllabus - B.tech (Mechanical Engg) - II YEAR - R10 StudentsDokumen24 halamanJNTUK - DAP - Proposed Course Structure and Syllabus - B.tech (Mechanical Engg) - II YEAR - R10 StudentsKrishna BhaskarBelum ada peringkat
- Voltage REgulationDokumen8 halamanVoltage REgulationJacob CarterBelum ada peringkat
- Unit 3Dokumen41 halamanUnit 3nysretBelum ada peringkat
- Voltage Regulation of GeneratorsDokumen3 halamanVoltage Regulation of Generatorsvinayaka_karanthBelum ada peringkat
- Worktext in Electric Circuits 2Dokumen247 halamanWorktext in Electric Circuits 2Chris Real Pabia0% (1)
- Sintex Water TanksDokumen1 halamanSintex Water TankskailashdhirwaniBelum ada peringkat
- Fitz ch05Dokumen37 halamanFitz ch05Pamela Hayes100% (1)
- An Example How To Calculate Voltage Drop and Size of Electrical CableDokumen6 halamanAn Example How To Calculate Voltage Drop and Size of Electrical CableMuhammad Waseem AnjumBelum ada peringkat
- Unplanned OutageDokumen16 halamanUnplanned Outagedanish873Belum ada peringkat
- Dielectric CapcitorDokumen4 halamanDielectric CapcitorumamaheshwarraoBelum ada peringkat
- Staff Selection PatternDokumen4 halamanStaff Selection PatternumamaheshwarraoBelum ada peringkat
- DipoleDokumen39 halamanDipoleumamaheshwarraoBelum ada peringkat
- Chapter 1 Circuit Concepts and Network Specification TechniquesDokumen110 halamanChapter 1 Circuit Concepts and Network Specification TechniquesKarthikeyan RamalingamBelum ada peringkat
- 6 Sem 1Dokumen25 halaman6 Sem 1umamaheshwarraoBelum ada peringkat
- Ies Reference Books: 31 CommentsDokumen1 halamanIes Reference Books: 31 CommentsAmeer Khan0% (1)
- NK Clerical Bank PO Exam Sample Solved Papers 2010Dokumen8 halamanNK Clerical Bank PO Exam Sample Solved Papers 2010amibinBelum ada peringkat
- Ies Reference Books: 31 CommentsDokumen1 halamanIes Reference Books: 31 CommentsAmeer Khan0% (1)
- Engg Multiple Choice QuestionsDokumen17 halamanEngg Multiple Choice QuestionsumamaheshwarraoBelum ada peringkat
- Electrical TheoryDokumen44 halamanElectrical TheoryumamaheshwarraoBelum ada peringkat
- 1-Bill Cantor Steve McCluer - DC Arc FlashDokumen10 halaman1-Bill Cantor Steve McCluer - DC Arc FlashMarco Miranda RodríguezBelum ada peringkat
- Synchronous Generator MCQ 1 147Dokumen22 halamanSynchronous Generator MCQ 1 147umamaheshwarraoBelum ada peringkat
- Arc FlashDokumen16 halamanArc FlashumamaheshwarraoBelum ada peringkat
- Objective ElectronicsDokumen159 halamanObjective ElectronicsPrakash Upadhyay78% (9)
- Crackgate2015.in Best Gate 2015 Electrical Engineering BDokumen5 halamanCrackgate2015.in Best Gate 2015 Electrical Engineering BumamaheshwarraoBelum ada peringkat
- Electrical FormulasDokumen11 halamanElectrical FormulasumamaheshwarraoBelum ada peringkat
- Alternator MCQDokumen30 halamanAlternator MCQKhealMaeL.Enagordaf50% (4)
- Analog CircuitsDokumen18 halamanAnalog CircuitsSAMIT KARMAKARBelum ada peringkat
- Gate 2015 Tips and TricksDokumen9 halamanGate 2015 Tips and TricksumamaheshwarraoBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Task 1: Investigate The CAMDokumen3 halamanTask 1: Investigate The CAMIonut StanciuBelum ada peringkat
- DIY 51 Home Theater SystemDokumen12 halamanDIY 51 Home Theater SystembestxeroxshopBelum ada peringkat
- Manual MSE5200Dokumen157 halamanManual MSE5200Moiz ElsheikhBelum ada peringkat
- IEC 60870-5-103 Communication Protocol User Guide: Page: 1 of 13 NA011 IEC 870-5-103Dokumen13 halamanIEC 60870-5-103 Communication Protocol User Guide: Page: 1 of 13 NA011 IEC 870-5-103Utkan BALABANBelum ada peringkat
- Service Manual: © 2009-12 Printed in Ja Pan B51-8901-00 (N) 527Dokumen117 halamanService Manual: © 2009-12 Printed in Ja Pan B51-8901-00 (N) 527Coyne GibsonBelum ada peringkat
- ACI Anywhere Extending The ACI Fabric - Max ArdicaDokumen53 halamanACI Anywhere Extending The ACI Fabric - Max ArdicavijiBelum ada peringkat
- Online YouTube To MP3 Converter & Playlist DownloaderDokumen1 halamanOnline YouTube To MP3 Converter & Playlist DownloaderMiguelDrnnBelum ada peringkat
- Nokia BSC Command'sDokumen2 halamanNokia BSC Command'sRao Dheeru100% (7)
- Input and Output DeviceDokumen9 halamanInput and Output Deviceishu hammaBelum ada peringkat
- List Information (2015)Dokumen3 halamanList Information (2015)Cahyo Tri KusumaBelum ada peringkat
- East Point College of Engineering and Technology Bangalore Collegecode - Ep Date - 2021-03-08 Session - 14:00:00 Count - 57Dokumen5 halamanEast Point College of Engineering and Technology Bangalore Collegecode - Ep Date - 2021-03-08 Session - 14:00:00 Count - 57Vasavi VaasuBelum ada peringkat
- 4.6 Uses of An OscilloscopeDokumen3 halaman4.6 Uses of An OscilloscopeFadhlina NatasyaBelum ada peringkat
- EEE351 Principles of Communication SystemsDokumen108 halamanEEE351 Principles of Communication Systemsahmad hassaanBelum ada peringkat
- 3G Communication Protocols: 4.1 UTRAN Protocol Structure: The Encryption Mechanism Is Built Into RadioDokumen9 halaman3G Communication Protocols: 4.1 UTRAN Protocol Structure: The Encryption Mechanism Is Built Into RadioSithija AlwisBelum ada peringkat
- Wimax: BY Shashi JakkuDokumen42 halamanWimax: BY Shashi JakkuAyeshkhanBelum ada peringkat
- Fidelio System: Installation & User ManualDokumen71 halamanFidelio System: Installation & User ManualLauren Ayleen FloresBelum ada peringkat
- Eds-208 Series Quick Installation Guide: Moxa Etherdevice SwitchDokumen12 halamanEds-208 Series Quick Installation Guide: Moxa Etherdevice SwitchJudin HBelum ada peringkat
- FatShark Predator V2 Manual-RevADokumen12 halamanFatShark Predator V2 Manual-RevAAltemarFernandesdeOliveiraBelum ada peringkat
- BP Testing EmailDokumen4 halamanBP Testing EmailimpeesaBelum ada peringkat
- GSM PS Performance Evaluation and Optimization GuideDokumen21 halamanGSM PS Performance Evaluation and Optimization GuidemohyeBelum ada peringkat
- 32STW101 Test ReportDokumen21 halaman32STW101 Test Reportnwyg16Belum ada peringkat
- PCI Planning - 4 PDFDokumen25 halamanPCI Planning - 4 PDFsivakumar100% (1)
- Humidity and Temperature Sensor Using IOT 2 3Dokumen3 halamanHumidity and Temperature Sensor Using IOT 2 3Prasad DeshmukhBelum ada peringkat
- Physics: Autonomous Educational Organization Nazarbayev Intellectual SchoolsDokumen49 halamanPhysics: Autonomous Educational Organization Nazarbayev Intellectual SchoolsAbylai Tashtan100% (1)
- RTN380AX Installation and Commissioning GuideDokumen38 halamanRTN380AX Installation and Commissioning GuideJonnell CanosaBelum ada peringkat
- Accuchek HTDokumen2 halamanAccuchek HTSatish KumarBelum ada peringkat
- 10.4.3 Packet Tracer - Basic Device Configuration PDFDokumen2 halaman10.4.3 Packet Tracer - Basic Device Configuration PDFGaille AnneBelum ada peringkat
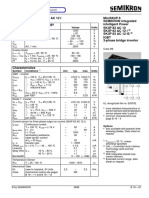
- SKii P83 AC12Dokumen3 halamanSKii P83 AC12DYLAN JOSUE (SOLUCIONES TECNOLOGICA)Belum ada peringkat
- Multiple Choice Questions and Answers On Digital Signal Processing (Part-1)Dokumen12 halamanMultiple Choice Questions and Answers On Digital Signal Processing (Part-1)siva86% (7)
- Cisco EDFA 15216 PDFDokumen308 halamanCisco EDFA 15216 PDFHieu PhamBelum ada peringkat