Anda mungkin juga menyukai
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Basics of X-Ray Powder DiffractionDokumen97 halamanBasics of X-Ray Powder DiffractionGeorgia ManikaBelum ada peringkat
- PcaDokumen22 halamanPcaRashedul IslamBelum ada peringkat
- Basics of X-Ray Powder DiffractionDokumen97 halamanBasics of X-Ray Powder DiffractionGeorgia ManikaBelum ada peringkat
- Basics of X-Ray Powder DiffractionDokumen97 halamanBasics of X-Ray Powder DiffractionGeorgia ManikaBelum ada peringkat
- PCA Explained: How Neural Networks Can Perform Dimensionality ReductionDokumen25 halamanPCA Explained: How Neural Networks Can Perform Dimensionality ReductionRashedul IslamBelum ada peringkat
- Madhyajuger Bangla O BangaliDokumen64 halamanMadhyajuger Bangla O BangaliRashedul IslamBelum ada peringkat
- Solid Oxide Fuel Cell System Control in MatlabDokumen54 halamanSolid Oxide Fuel Cell System Control in MatlabRashedul IslamBelum ada peringkat
- IIE Six Sigma Green Belt Certification Event PDFDokumen1 halamanIIE Six Sigma Green Belt Certification Event PDFRashedul IslamBelum ada peringkat
- Estructuras Químicas en LatexDokumen84 halamanEstructuras Químicas en LatexMiguel Angel Mosquera MolinaBelum ada peringkat
- RubaiyatDokumen64 halamanRubaiyatRashedul IslamBelum ada peringkat
- Omega PID TunningDokumen4 halamanOmega PID TunningOwaisBelum ada peringkat
- ResultsDokumen110 halamanResultsRashedul IslamBelum ada peringkat
- Cosmosac Regression PresentationDokumen27 halamanCosmosac Regression PresentationRashedul IslamBelum ada peringkat
- AIChE 2013 Abstract1 May 08Dokumen1 halamanAIChE 2013 Abstract1 May 08Rashedul IslamBelum ada peringkat
- PCA BiologyDokumen45 halamanPCA BiologyRashedul IslamBelum ada peringkat
- BCBS Health InsuranceDokumen1 halamanBCBS Health InsuranceRashedul IslamBelum ada peringkat
- Data Screening AlgorithmDokumen1 halamanData Screening AlgorithmRashedul IslamBelum ada peringkat
- HW 2 F 2011Dokumen3 halamanHW 2 F 2011Rashedul IslamBelum ada peringkat
- Fortran 77 Tutorial PDFDokumen38 halamanFortran 77 Tutorial PDFDheeraj VermaBelum ada peringkat
- HW 8 InputDokumen5 halamanHW 8 InputRashedul IslamBelum ada peringkat
- Saved RecsDokumen2 halamanSaved RecsRashedul IslamBelum ada peringkat
- How To Estimate Reid Vapor Pressure (RVP) of A BlendDokumen10 halamanHow To Estimate Reid Vapor Pressure (RVP) of A BlendRashedul IslamBelum ada peringkat
- Shell Standard Control ProblemDokumen8 halamanShell Standard Control ProblemRashedul IslamBelum ada peringkat
- CS 312: Algorithm Analysis: ObjectivesDokumen8 halamanCS 312: Algorithm Analysis: ObjectivesRashedul IslamBelum ada peringkat
- Z-Transforms and Transfer FunctionsDokumen85 halamanZ-Transforms and Transfer FunctionsRashedul IslamBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- DistillationDokumen109 halamanDistillationAmna AnjumBelum ada peringkat
- Grade 10 Chemistry Assignment on Acids, Bases and SaltsDokumen9 halamanGrade 10 Chemistry Assignment on Acids, Bases and SaltsNyah GravesandeBelum ada peringkat
- Chemistry Course ContentDokumen5 halamanChemistry Course ContenttesfayeBelum ada peringkat
- Lime Production From Limestone - Current TechnologyDokumen6 halamanLime Production From Limestone - Current TechnologyA for AbhijithBelum ada peringkat
- Temperature Effects on Chemical EquilibriumDokumen3 halamanTemperature Effects on Chemical EquilibriumDingBelum ada peringkat
- Limiting Gas Ratio: Related TermsDokumen14 halamanLimiting Gas Ratio: Related TermsimranunarBelum ada peringkat
- Inchem 211L - Module 3Dokumen23 halamanInchem 211L - Module 3Reyes, John PaulBelum ada peringkat
- Distribution CoefficientDokumen5 halamanDistribution CoefficientPrem Mohan SinghBelum ada peringkat
- 2017 Singapore H2 Chemistry Prelim PapersDokumen300 halaman2017 Singapore H2 Chemistry Prelim PapersChong56Belum ada peringkat
- Reversible ReactionDokumen7 halamanReversible ReactionGM Ali KawsarBelum ada peringkat
- Tarea 1 Itzayana ContrerasDokumen18 halamanTarea 1 Itzayana ContrerasITZAYANA GUADALUPE CONTRERAS CARTASBelum ada peringkat
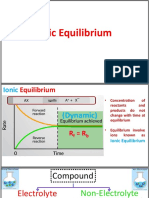
- Ionic Equilibrium ExplainedDokumen14 halamanIonic Equilibrium Explained8842 AnuragBelum ada peringkat
- Seoul National University - Process Modeling Using Aspen PlusDokumen76 halamanSeoul National University - Process Modeling Using Aspen PlusaftenteaBelum ada peringkat
- Crossing The Bridge Between Thermodynamics and Electrochemistry.Dokumen11 halamanCrossing The Bridge Between Thermodynamics and Electrochemistry.Anuar HernandezBelum ada peringkat
- MSC Chemistry (For Colleges) Semester I-IV 2019-20Dokumen53 halamanMSC Chemistry (For Colleges) Semester I-IV 2019-20rakeshtrikha8668Belum ada peringkat
- Aspen Plus Tutorial: Model Reactors for Chemical ProcessesDokumen9 halamanAspen Plus Tutorial: Model Reactors for Chemical ProcessesJoshua NgetunyBelum ada peringkat
- Chem RXN EquilDokumen12 halamanChem RXN EquilAnonymous lOMOpX3Belum ada peringkat
- Lorne Park Secondary School Grade 12 Chemistry Practice ExamDokumen10 halamanLorne Park Secondary School Grade 12 Chemistry Practice ExammatteiotoneBelum ada peringkat
- KSP & Reaction QuotientDokumen2 halamanKSP & Reaction QuotientAndy TanBelum ada peringkat
- Le Chatelier Equilibrium Worksheet QuestionsDokumen35 halamanLe Chatelier Equilibrium Worksheet QuestionsJaya Chitra Degala RamaluBelum ada peringkat
- Equilibrium - Shobhit NirwanDokumen27 halamanEquilibrium - Shobhit Nirwanlyra caddelBelum ada peringkat
- TMP 409 DDokumen5 halamanTMP 409 DFrontiersBelum ada peringkat
- Simulation of The Butyl Acetate Synthesis Via Catalytic DistillationDokumen6 halamanSimulation of The Butyl Acetate Synthesis Via Catalytic Distillationmehul10941Belum ada peringkat
- Chemical Engineering Mass Transfer NotesDokumen36 halamanChemical Engineering Mass Transfer NotesLebohang Czar Nku50% (2)
- BAT Reference Document on Sulphuric Acid ProductionDokumen58 halamanBAT Reference Document on Sulphuric Acid ProductionLisa Foster100% (1)
- Equilibrium Practice Problems Answers 201314Dokumen6 halamanEquilibrium Practice Problems Answers 201314Monceda Ramos MareinelleBelum ada peringkat
- General Chemistry 2 Q4 Module 2 1Dokumen15 halamanGeneral Chemistry 2 Q4 Module 2 1Darwin Grande AlvaredaBelum ada peringkat
- Buku Kimia Fisika PDFDokumen405 halamanBuku Kimia Fisika PDFHasrilia Beskara0% (1)
- 2006 Adsorption Equilibrium of Phenol Onto Chemically Modified Activated Carbon F400Dokumen6 halaman2006 Adsorption Equilibrium of Phenol Onto Chemically Modified Activated Carbon F400Alberto Delgado QuiñonesBelum ada peringkat
- AITS 2018 ScheduleDokumen2 halamanAITS 2018 SchedulewefWE50% (2)