Anda mungkin juga menyukai
- GPS 3 Upd PDFDokumen100 halamanGPS 3 Upd PDFTania Septi100% (1)
- Bab IDokumen38 halamanBab IAlfin Faisal SyahputraBelum ada peringkat
- Formation Evaluation ToolsDokumen148 halamanFormation Evaluation ToolsFristi Shabrina ParameswariBelum ada peringkat
- Accurate facade feature extraction from 3D point cloudsDokumen8 halamanAccurate facade feature extraction from 3D point cloudsbimoajiwidyantoroBelum ada peringkat
- TDS Digital Seismograph SoftwareDokumen37 halamanTDS Digital Seismograph SoftwareAngga Vertika Diansari100% (1)
- Responsi Plotting ManualDokumen20 halamanResponsi Plotting ManualGeorge MastersonBelum ada peringkat
- Macam-Macam Resolusi Satelit Penginderaan JauhDokumen7 halamanMacam-Macam Resolusi Satelit Penginderaan JauhRosmalisa DwiyaniekBelum ada peringkat
- HasanuddinZAbidin PDFDokumen61 halamanHasanuddinZAbidin PDFPuput Kumara SariBelum ada peringkat
- Hydrographic and Tunnel SurveyingDokumen21 halamanHydrographic and Tunnel Surveyingzain Ishaq100% (1)
- Triangulated Irregular NetworkDokumen9 halamanTriangulated Irregular NetworkRizal FirmansyahBelum ada peringkat
- Jurnal Evaluasi RTRW Rencana Tata RuangDokumen9 halamanJurnal Evaluasi RTRW Rencana Tata RuangIkhsan WahyudinBelum ada peringkat
- Chap06A MonoRestitutionDokumen69 halamanChap06A MonoRestitutionAnonymousBelum ada peringkat
- Sistem Referensi Geodetik Dan Penentuan Posisi Di Laut Marine KadasterDokumen49 halamanSistem Referensi Geodetik Dan Penentuan Posisi Di Laut Marine KadasterMuhammad Mahirda Ariwibowo100% (1)
- Skew Normal CorrectionDokumen8 halamanSkew Normal Correctionnaufal farrasBelum ada peringkat
- Materi 5 - Metode RadioaktifDokumen23 halamanMateri 5 - Metode RadioaktifSius MacoBelum ada peringkat
- Status Kualitas Perairan Situ Cisanti - Gunung Wayang, Subdas Cirasea Citarum HuluDokumen9 halamanStatus Kualitas Perairan Situ Cisanti - Gunung Wayang, Subdas Cirasea Citarum HulukomaraBelum ada peringkat
- RINEX: The Receiver Independent Exchange FormatDokumen100 halamanRINEX: The Receiver Independent Exchange FormatSyach Roel100% (1)
- Kelompok 11-Acara4-Uji Pumping Test Menggunakan Metode SLUG TESTDokumen11 halamanKelompok 11-Acara4-Uji Pumping Test Menggunakan Metode SLUG TESTFERDY PUTRA PRATAMABelum ada peringkat
- Laporan Praktikum GeolistrikDokumen9 halamanLaporan Praktikum GeolistrikHollowAnggara100% (1)
- Tsunami Mentawai 25 Oktober 2010 Simulasi Comcot 1Dokumen13 halamanTsunami Mentawai 25 Oktober 2010 Simulasi Comcot 1nia hilwaBelum ada peringkat
- Flood hazard model using remote sensingDokumen15 halamanFlood hazard model using remote sensingEka S. SaputraBelum ada peringkat
- Rencana Pokdo SertarDokumen6 halamanRencana Pokdo SertarJunjungan MuhammadBelum ada peringkat
- Technical Internship Project Proposal - ITS - Flood VulnerabilityDokumen25 halamanTechnical Internship Project Proposal - ITS - Flood Vulnerabilityhafidz amirBelum ada peringkat
- Jurnal Pengindraan JauhDokumen11 halamanJurnal Pengindraan JauhTaufan AlbarryBelum ada peringkat
- Filtering DSM2DTMDokumen15 halamanFiltering DSM2DTMhablugBelum ada peringkat
- Tabel Nilai Resistivitas BatuanDokumen2 halamanTabel Nilai Resistivitas BatuanAnonymous dsSvVSrxBelum ada peringkat
- Tektonik Dasar LautDokumen50 halamanTektonik Dasar LautRidho Ryzkita SulaksonoBelum ada peringkat
- ADS80 Datasheet enDokumen2 halamanADS80 Datasheet enCarlos Eduardo Plata CabreraBelum ada peringkat
- Land Subsidence Masyhur Final1 For AudienceDokumen25 halamanLand Subsidence Masyhur Final1 For AudienceakbarBelum ada peringkat
- Analisis Risiko Bencana Tanah Longsor Di Kecamatan Sukasada, Kabupaten BulelengDokumen8 halamanAnalisis Risiko Bencana Tanah Longsor Di Kecamatan Sukasada, Kabupaten BulelengbagusBelum ada peringkat
- Groundwater Investigation Methods: Surface and Subsurface TechniquesDokumen13 halamanGroundwater Investigation Methods: Surface and Subsurface TechniquesSirimilla MeharBelum ada peringkat
- Geolistrik Metode Resistivitas Untuk Penelitian Limbah Bawah TanahDokumen67 halamanGeolistrik Metode Resistivitas Untuk Penelitian Limbah Bawah TanahMaria MawarBelum ada peringkat
- Tabel Klasifikasi Metode GeofisikaDokumen2 halamanTabel Klasifikasi Metode GeofisikaRindangPermadiBelum ada peringkat
- Gravity Notes01Dokumen43 halamanGravity Notes01evan8februariBelum ada peringkat
- 424a 2016Dokumen5 halaman424a 2016IrsyadnurJ.MargiantoBelum ada peringkat
- Indonesian Soil ClassificationDokumen2 halamanIndonesian Soil ClassificationYiyi SulaemanBelum ada peringkat
- Geospatial Artificial Intelligence: Konsep Dan Aplikasinya: Dr. Edy IrwansyahDokumen35 halamanGeospatial Artificial Intelligence: Konsep Dan Aplikasinya: Dr. Edy Irwansyahoedoet70Belum ada peringkat
- Baseline Processing ReportDokumen17 halamanBaseline Processing ReportMAMAN MAMANBelum ada peringkat
- PCI Geomatica - Palsar TutorialDokumen12 halamanPCI Geomatica - Palsar TutorialIni ChitozBelum ada peringkat
- Materi Kuliah Konsep GeologiDokumen107 halamanMateri Kuliah Konsep GeologiPandu Riyadi ShalihinBelum ada peringkat
- Precipitable Water Vapor (PWV) Calculation Using The Permanent Single GPS Station in Makasar and Bitung, IndonesiaDokumen6 halamanPrecipitable Water Vapor (PWV) Calculation Using The Permanent Single GPS Station in Makasar and Bitung, IndonesiaInternational Journal of Innovative Science and Research TechnologyBelum ada peringkat
- Aplikasi Survei Hidrografi Dalam Pengelolaan Sumber Daya Migas (Offshore)Dokumen12 halamanAplikasi Survei Hidrografi Dalam Pengelolaan Sumber Daya Migas (Offshore)faizalprbw50% (4)
- Definisi Geomorfologi Menurut para AhliDokumen3 halamanDefinisi Geomorfologi Menurut para Ahliiqbal maratamaBelum ada peringkat
- Akuifer, Akuiklud, Dan AkuitardDokumen25 halamanAkuifer, Akuiklud, Dan AkuitardNicho GintingBelum ada peringkat
- Simulasi Spasial Berbasis Sistem Informasi Geografi Dan Cellular Automata Untuk Pemodelan Perubahan Penggunaan Lahan Di Daerah Pinggiran Kota YogyakartaDokumen14 halamanSimulasi Spasial Berbasis Sistem Informasi Geografi Dan Cellular Automata Untuk Pemodelan Perubahan Penggunaan Lahan Di Daerah Pinggiran Kota Yogyakartazidni ramadhanBelum ada peringkat
- Advanced Geodesy: GLS 611 / GSS611Dokumen27 halamanAdvanced Geodesy: GLS 611 / GSS611Naim LotfiBelum ada peringkat
- IJEE - February - 2013 - Extension (Vol 01-No 01) IssueDokumen191 halamanIJEE - February - 2013 - Extension (Vol 01-No 01) IssueAnup MathewBelum ada peringkat
- Introduction To Synthetic Aperture Sonar PDFDokumen27 halamanIntroduction To Synthetic Aperture Sonar PDFnaivedya_mishraBelum ada peringkat
- Applied Geophysics TechniquesDokumen61 halamanApplied Geophysics Techniquesfairus100% (2)
- Booklet Pit Paai-5 2021Dokumen50 halamanBooklet Pit Paai-5 2021Seksi Pemantauan BKATBelum ada peringkat
- Binder Modul WMS 10Dokumen52 halamanBinder Modul WMS 10sandhiakhmadBelum ada peringkat
- 11 Airborne Gravity Gradiometry in The Search For Mineral Deposits 20Dokumen14 halaman11 Airborne Gravity Gradiometry in The Search For Mineral Deposits 20Salvadora1Belum ada peringkat
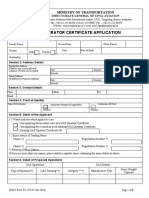
- Apply for Indonesian UAS Operator CertificateDokumen2 halamanApply for Indonesian UAS Operator CertificateTridatu DokumentasiBelum ada peringkat
- JC Horne 1978Dokumen33 halamanJC Horne 1978vaniaBelum ada peringkat
- Gps Positioning and SurveyingDokumen62 halamanGps Positioning and SurveyinglisahunBelum ada peringkat
- Error Budget For SPSDokumen15 halamanError Budget For SPSJohn Egyir Aggrey100% (1)
- GPS Positioning TechniquesDokumen99 halamanGPS Positioning TechniquesSyahrul RivaldiBelum ada peringkat
- GPS (Global Positioning System) & DGPS (Differential Global Positioning System)Dokumen103 halamanGPS (Global Positioning System) & DGPS (Differential Global Positioning System)NoCopyrightTunesBelum ada peringkat
- GPSDokumen41 halamanGPSSafdar RizviBelum ada peringkat
- GPS Tutorial 1 PDFDokumen43 halamanGPS Tutorial 1 PDFRavi ShankarBelum ada peringkat
- Simbol Peta EksplorasiDokumen1 halamanSimbol Peta EksplorasiEvan Sutikno JuntakBelum ada peringkat
- Point ListDokumen2 halamanPoint ListFred AronggearBelum ada peringkat
- What Is An EarthquakeDokumen6 halamanWhat Is An EarthquakeFred AronggearBelum ada peringkat
- Asteroid impacts mega-tsunamis theory lacks evidenceDokumen2 halamanAsteroid impacts mega-tsunamis theory lacks evidenceFred AronggearBelum ada peringkat
- 1203 Cer Rover GpsDokumen7 halaman1203 Cer Rover GpsFred AronggearBelum ada peringkat
- Trimble GPSPathfinderOfficeDokumen2 halamanTrimble GPSPathfinderOfficeFred AronggearBelum ada peringkat
- 04-CACs For CIFP March 2020Dokumen13 halaman04-CACs For CIFP March 2020Alan Michel AngeloBelum ada peringkat
- Ssog Ec - 150204 036Dokumen4 halamanSsog Ec - 150204 036Edu SaraviaBelum ada peringkat
- Intelsat 902 Satellite Footprints PDFDokumen5 halamanIntelsat 902 Satellite Footprints PDFThee MaungBelum ada peringkat
- Worldview 4Dokumen2 halamanWorldview 4CRISTINA KAREN OVANDO CRESPOBelum ada peringkat
- Wide Area Augmentation SystemDokumen4 halamanWide Area Augmentation SystemBilal ChBelum ada peringkat
- Nascar 12735 V 12855 Eutelsat 10 East DVBDokumen4 halamanNascar 12735 V 12855 Eutelsat 10 East DVBStephanie WarnerBelum ada peringkat
- Paparan Gps Dan Aplikasinya - Juli 2019Dokumen27 halamanPaparan Gps Dan Aplikasinya - Juli 2019Rhenato GeovanBelum ada peringkat
- EUTELSAT E5WB FootprintDokumen2 halamanEUTELSAT E5WB FootprintSkybrokersBelum ada peringkat
- ADP Satellite Comms GuideDokumen19 halamanADP Satellite Comms Guidemehul03ecBelum ada peringkat
- By: Sir Umair Rasheed: The University of LahoreDokumen41 halamanBy: Sir Umair Rasheed: The University of LahoreSuman AgarwalBelum ada peringkat
- RESEARCHDokumen24 halamanRESEARCHBlur JoebertBelum ada peringkat
- Indian Space Programme PPT BriefDokumen24 halamanIndian Space Programme PPT Briefsai420100% (1)
- GNSS Positioning MethodsDokumen46 halamanGNSS Positioning MethodsVlaire Janrex LondoñoBelum ada peringkat
- Indian Remote Sensing satellites provide critical dataDokumen24 halamanIndian Remote Sensing satellites provide critical datasajjanbhosaleBelum ada peringkat
- Key ViaccessDokumen3 halamanKey ViaccessMohamed El GlafiBelum ada peringkat
- UCS Satellite Database 9-1-15Dokumen549 halamanUCS Satellite Database 9-1-15Michael RogersBelum ada peringkat
- magicGNSS Long Term Prediction Service Technical SpecificationsDokumen1 halamanmagicGNSS Long Term Prediction Service Technical SpecificationslusopoBelum ada peringkat
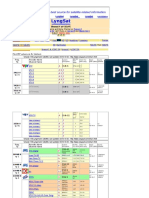
- Vinasat 1 at 132 LyngSatDokumen4 halamanVinasat 1 at 132 LyngSattalkertistBelum ada peringkat
- Technical Reading 1 Unit IvDokumen2 halamanTechnical Reading 1 Unit IvCynthia RodriguezBelum ada peringkat
- Ec8094 Satellite CommunicationDokumen2 halamanEc8094 Satellite CommunicationhemaBelum ada peringkat
- Gps Space Segment DefinitionDokumen3 halamanGps Space Segment DefinitionKarenBelum ada peringkat
- D1T1 - Jim Geovedi - Hacking A Bird in The Sky 2.0Dokumen36 halamanD1T1 - Jim Geovedi - Hacking A Bird in The Sky 2.0tini158Belum ada peringkat
- Satellite Communication Lecture Notes - Electronics and Communications Lecture NotesDokumen8 halamanSatellite Communication Lecture Notes - Electronics and Communications Lecture NotesJoñalex N. MvamiBelum ada peringkat
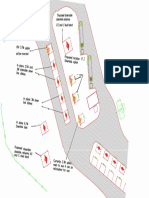
- Satellite Antenna Farm SiteDokumen1 halamanSatellite Antenna Farm SiteAnonymous fHFI5gUBelum ada peringkat
- Intelsat 11-02 - Thor 2/3 0.8W: (Durant Les Match de Foot)Dokumen2 halamanIntelsat 11-02 - Thor 2/3 0.8W: (Durant Les Match de Foot)Adil HoussniBelum ada peringkat
- C Band and Ext. C-BandDokumen4 halamanC Band and Ext. C-BandAwadalla JbooraBelum ada peringkat
- Master Reset All ReceiverDokumen12 halamanMaster Reset All Receiverbaharhida100% (1)
- Public Speaking Text - Chasing Our DreamsDokumen2 halamanPublic Speaking Text - Chasing Our DreamsArvinthran Raja Kumaran78% (32)
- Free To Air, Indian TV, Free TV, Satellite TV, FTA Channels PDFDokumen18 halamanFree To Air, Indian TV, Free TV, Satellite TV, FTA Channels PDFchidambaram kasi100% (1)
- Reverse Engineering Satellite TV Signals Using a 6-Foot Solid Alloy Parabolic Dish AntennaDokumen10 halamanReverse Engineering Satellite TV Signals Using a 6-Foot Solid Alloy Parabolic Dish AntennaBoniBelum ada peringkat
- The Storm of the Century: Tragedy, Heroism, Survival, and the Epic True Story of America's Deadliest Natural DisasterDari EverandThe Storm of the Century: Tragedy, Heroism, Survival, and the Epic True Story of America's Deadliest Natural DisasterBelum ada peringkat
- The Story of Stuff: How Our Obsession with Stuff is Trashing the Planet, Our Communities, and Our Health-and a Vision for ChangeDari EverandThe Story of Stuff: How Our Obsession with Stuff is Trashing the Planet, Our Communities, and Our Health-and a Vision for ChangePenilaian: 4.5 dari 5 bintang4.5/5 (37)
- The Comfort of Crows: A Backyard YearDari EverandThe Comfort of Crows: A Backyard YearPenilaian: 4.5 dari 5 bintang4.5/5 (23)
- A Brief History of the Earth's Climate: Everyone's Guide to the Science of Climate ChangeDari EverandA Brief History of the Earth's Climate: Everyone's Guide to the Science of Climate ChangePenilaian: 5 dari 5 bintang5/5 (4)
- Smokejumper: A Memoir by One of America's Most Select Airborne FirefightersDari EverandSmokejumper: A Memoir by One of America's Most Select Airborne FirefightersBelum ada peringkat
- The Weather Machine: A Journey Inside the ForecastDari EverandThe Weather Machine: A Journey Inside the ForecastPenilaian: 3.5 dari 5 bintang3.5/5 (31)
- The Fourth Phase of Water: Beyond Solid, Liquid, and VaporDari EverandThe Fourth Phase of Water: Beyond Solid, Liquid, and VaporPenilaian: 5 dari 5 bintang5/5 (8)
- Water to the Angels: William Mulholland, His Monumental Aqueduct, and the Rise of Los AngelesDari EverandWater to the Angels: William Mulholland, His Monumental Aqueduct, and the Rise of Los AngelesPenilaian: 4 dari 5 bintang4/5 (21)
- Survival Mom: How to Prepare Your Family for Everyday Disasters and Worst-Case ScenariosDari EverandSurvival Mom: How to Prepare Your Family for Everyday Disasters and Worst-Case ScenariosPenilaian: 3.5 dari 5 bintang3.5/5 (8)
- Zondervan Essential Atlas of the BibleDari EverandZondervan Essential Atlas of the BiblePenilaian: 4.5 dari 5 bintang4.5/5 (9)
- A Brief History of Earth: Four Billion Years in Eight ChaptersDari EverandA Brief History of Earth: Four Billion Years in Eight ChaptersPenilaian: 4 dari 5 bintang4/5 (111)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseDari EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniversePenilaian: 4 dari 5 bintang4/5 (111)
- The Water Kingdom: A Secret History of ChinaDari EverandThe Water Kingdom: A Secret History of ChinaPenilaian: 3.5 dari 5 bintang3.5/5 (19)
- When the Sahara Was Green: How Our Greatest Desert Came to BeDari EverandWhen the Sahara Was Green: How Our Greatest Desert Came to BePenilaian: 4.5 dari 5 bintang4.5/5 (5)
- Ruthless Tide: The Heroes and Villains of the Johnstown Flood, America's Astonishing Gilded Age DisasterDari EverandRuthless Tide: The Heroes and Villains of the Johnstown Flood, America's Astonishing Gilded Age DisasterPenilaian: 4.5 dari 5 bintang4.5/5 (11)
- The Man Who Caught the Storm: The Life of Legendary Tornado Chaser Tim SamarasDari EverandThe Man Who Caught the Storm: The Life of Legendary Tornado Chaser Tim SamarasPenilaian: 4 dari 5 bintang4/5 (21)
- Chemtrails, HAARP, and the Full Spectrum Dominance of Planet EarthDari EverandChemtrails, HAARP, and the Full Spectrum Dominance of Planet EarthPenilaian: 4.5 dari 5 bintang4.5/5 (5)
- The Witch's Yearbook: Spells, Stones, Tools and Rituals for a Year of Modern MagicDari EverandThe Witch's Yearbook: Spells, Stones, Tools and Rituals for a Year of Modern MagicPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- Sila: The first play in The Arctic CycleDari EverandSila: The first play in The Arctic CyclePenilaian: 5 dari 5 bintang5/5 (1)
- The Finest Hours: The True Story of the U.S. Coast Guard's Most Daring Sea RescueDari EverandThe Finest Hours: The True Story of the U.S. Coast Guard's Most Daring Sea RescuePenilaian: 4.5 dari 5 bintang4.5/5 (21)
- The Elements We Live By: How Iron Helps Us Breathe, Potassium Lets Us See, and Other Surprising Superpowers of the Periodic TableDari EverandThe Elements We Live By: How Iron Helps Us Breathe, Potassium Lets Us See, and Other Surprising Superpowers of the Periodic TablePenilaian: 3.5 dari 5 bintang3.5/5 (22)